英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
一种新型自主式水下航行器能量回收系统的可行性研究
N.C. Townsend1·R.A. Shenoi2
摘要 自主式水下航行器(AUV)只能在电池充电之间运行数小时或数天。扩展任务需要采用替代动力系统或就地充电策略。本文介绍了一种新型陀螺波浪能回收系统的可行性。能量清除系统承诺:对于整个任务,降低AUV动力电池的要求否定了携带足够能量储备的必要(尺寸和重量),通过释放辅助船时间(AUV部署中的主要成本部分)来降低成本,并且使AUV能够无限期地远程和可再生地在海上再充电来扩展任务。对于这一系列几何缩放鱼雷式的AUV展示了系统的理论描述和仿真结果。结果表明,所产生的功率足以为这一系列AUV传感器提供电力,并可与等效的太阳能电池板和风力涡轮机设备相媲美。
关键词 AUV,陀螺的,陀螺仪,能量,功率,波,可再生能源,获得,回收
- 引言
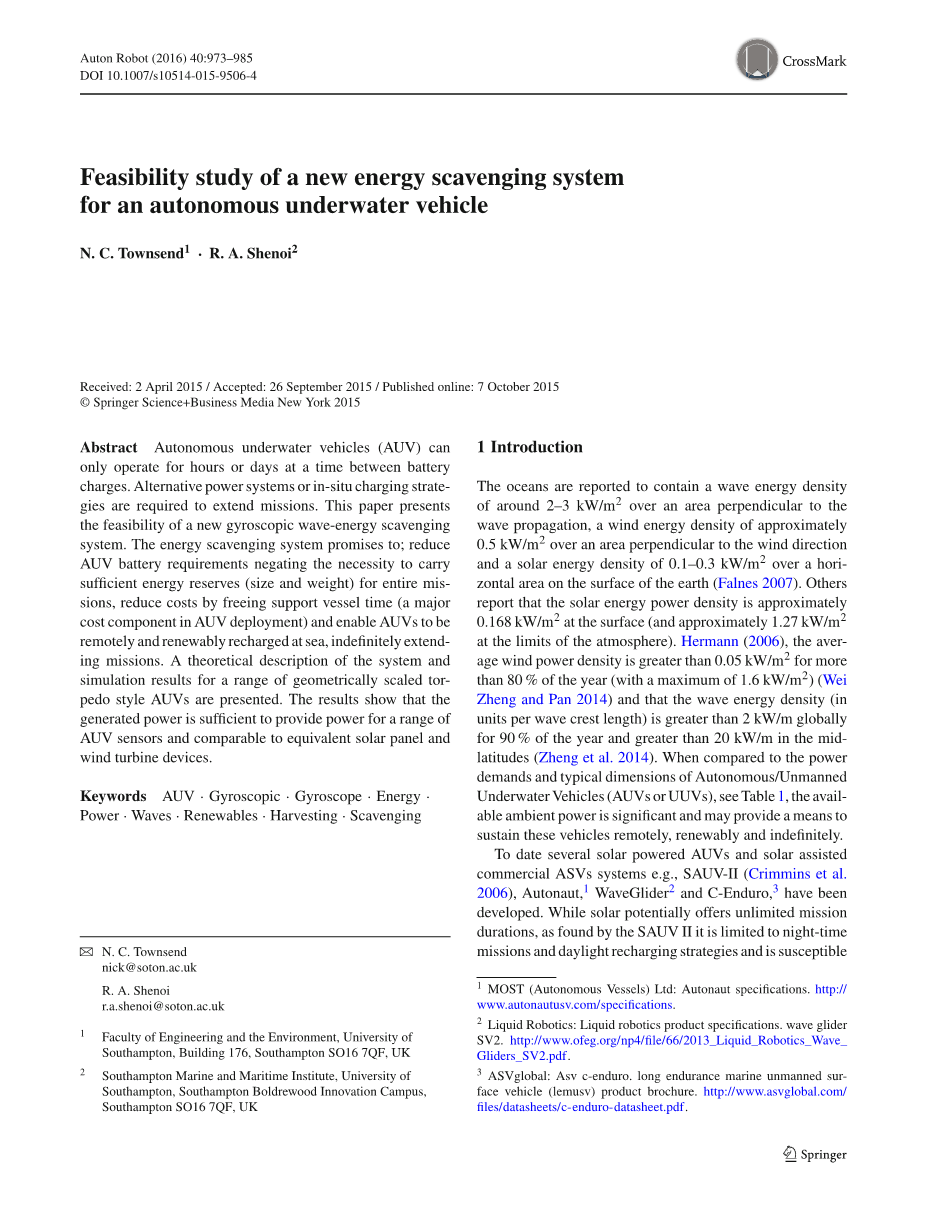
据报道,海洋垂直于波传播的区域包含约2-3千瓦平方米的波能密度,在垂直于风向的区域内约0.5千瓦平方米的风能密度和在地球表面的水平面积上的太阳能密度为0.1-0.3千瓦每平方米(Falnes 2007)。其他报道说,太阳能的功率密度在地面约为0.168千瓦每平方米(在大气极限约为1.27千瓦每平方米)。赫尔曼(2006年)指出,平均风力密度大于0.05千瓦每平方米,全年超过80%(2014Wei Zheng和Pan提出最大值为1.6千瓦每平方米),全球波浪能量密度(每波峰长度的单位)大于2千瓦每米,全年达到90%,大于20千瓦每米在中纬度(2014 Zheng 等提出)。当与自主或无人水下航行器(AUVs or UUVs)的功率需求和典型尺寸相比时,参见表1,可用的环境能量是显著的,并且可以提供用于维持这些航行器远程,可再生和无限期的能量。
表1是各种鱼雷式电池供电的AUV的功耗示例
|
航行器 |
质量 (kg) |
长度(m) |
直径(cm) |
能量(kwh) |
续航(h) |
功率(w) |
单位面积功率(kw/m2) |
|
Iver2-580-S |
20.5 |
1.52 |
14.7 |
0.6 |
14 |
43 |
0.19 |
|
Folaga AUV |
31.0 |
2.04 |
16.0 |
0.5 |
6 |
90 |
0.28 |
|
REMUS 100-S |
38.5 |
1.60 |
19.0 |
1.0 |
10 |
100 |
0.33 |
|
REMUS 600 |
240.0 |
3.25 |
32.4 |
5.2 |
70 |
74 |
0.07 |
|
Bluefin 12D |
260.0 |
4.32 |
32.0 |
7.5 |
30 |
250 |
0.18 |
|
Dorado class AUV |
680.0 |
5.30 |
53.0 |
11.0 |
17.5 |
629 |
0.22 |
|
Bluefin 21 |
750.0 |
4.93 |
53.0 |
13.5 |
25 |
540 |
0.21 |
|
Abyss AUV |
880.0 |
4.00 |
66.0 |
11.2 |
24 |
467 |
0.18 |
|
REMUS 6000 |
884.0 |
3.84 |
71.0 |
11.8 |
22 |
536 |
0.2 |
|
Eagle ray AUV |
940.0 |
4.60 |
69.0 |
29.4 |
30 |
979 |
0.31 |
|
Explorer-class MARUM SEAL AUV |
1300.0 |
5.50 |
74.0 |
14.0 |
19 |
737 |
0.18 |
|
Echo surveyor IV |
1450.0 |
5.40 |
100.0 |
45.0 |
50 |
900 |
0.17 |
迄今为止,已经开发了几种太阳能驱动的AUV和太阳能辅助商业ASV系统,例如SAUV-II(Crimmins等2006),Autonaut1, WaveGlider2和C-Enduro 3。尽管太阳能潜在地提供了无限的任务持续时间,但是发现SAUV II局限于夜间执行任务而白天充电的策略,并且容易受到生物污染(Crimmins et al.2006)。一种热能收集水下航行器的原型,SOLO-TREC已经开发出来,它使用在温水中(表面)熔化和膨胀并在较冷(较深)水中固化的相变材料(蜡质流体)来驱动水力发电机并提供动力(Yi 2013)。此外,各种基于风力的概念,基于帆的推进系统和波浪推进装置(见脚注1,2)也正在开发中。迄今为止,已经证明了能源回收系统。
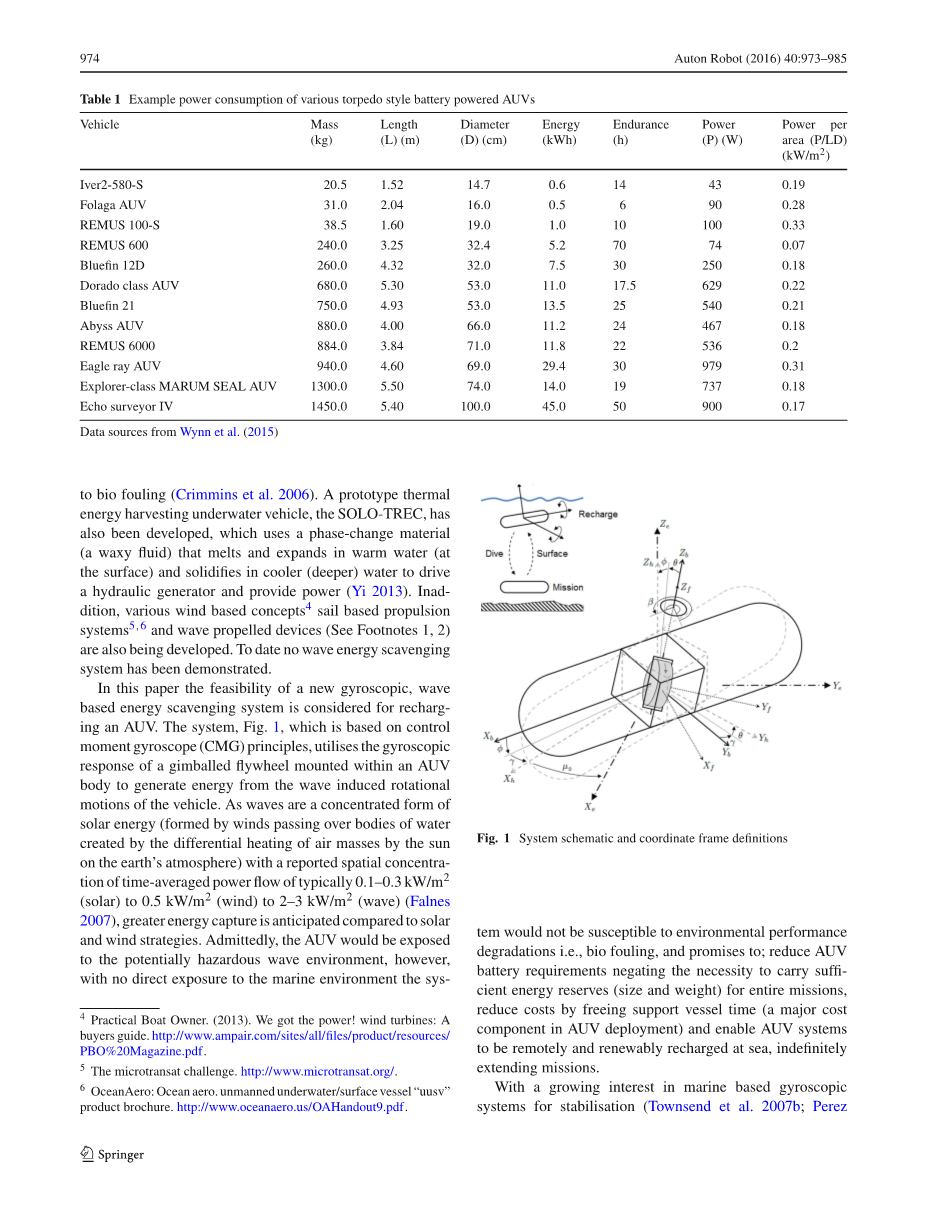
在本文中,考虑用于对AUV进行再充电基于一种新的回转波能量回收系统的可行性。基于控制力矩陀螺仪(CMG)原理的图1系统利用安装在AUV内部的万向飞轮的陀螺响应,以波浪引起的航行器的旋转运动来产生能量。由于波浪是太阳能的集中形式,(在地球大气层上通过由太阳对空气的不同加热产生的风穿过水体而形成的。)所报告的时间平均功率流的空间浓度通常为0.1-0.3千瓦每平方米(太阳能)至千瓦每平方米(风力)至2-3千瓦每平方米(波)( Falnes 2007),与太阳能和风能战略相比,预计会有更多的能源获取。不可否认的是,AUV会暴露于潜在的危险波浪环境中,但是,由于没有直接暴露于海洋环境,系统不会受到环境性能下降的影响,即生物污染,并且承诺;对于整个任务,降低AUV动力电池的要求否定了携带足够能量储备的必要(尺寸和重量),通过释放辅助船时间(AUV部署中的主要成本部分)来降低成本,并且使AUV能够无限期地远程和可再生地在海上再充电来扩展任务。
图1系统原理图和坐标系定义
随着对基于海洋的陀螺系统对水下机器人的波浪能量转换和能量存储以及姿态控制的兴趣日益增长,本文特别探讨了一种新型基于陀螺仪的能量回收系统的可行性,无限制的进动运动(陀螺仪进动可以采取任何角度,陀螺方程不一定被认为是线性的),高飞轮转速(成千而不是数百)以及垂直进动轴(由此滚动和俯仰运动有助于收获的能量)。提出了一系列几何缩放,俯仰,鱼雷式AUV(长度2-10米)的系统和仿真结果的理论描述,包括AUV响应,陀螺仪进动响应,功率和效率。
- 系统运动过程
如图1所示,我们用(ε,psi;,beta;)分别表示飞轮受限制,自旋和进动轴角度[飞轮从(Xf,Yf,Zf)旋转到(Xb,Yb,Z b) [AUV从(Xb,Yb,Zb)旋转到(Xh,Yh,Zh)],仰角和偏航角度分别表示为(theta;,phi;,gamma;)。其中(Xb,Yb,Zb)代表Yh,Zh)一个流体动力轴系统(它随着AUV的平均运动而移动,但不固定于AUV)和(Xe,Ye,Ze)表示一个地球固定的惯性轴系统。
根据动量方法之后,AUV体固定轴系统(Xb,Yb,Zb)中的角动量可以表示为;
忽略(最初)AUV运动效应(由subcript b*标识)。这里omega;f和I f表示飞轮相对于(Xf,Yf,Zf)的角运动和惯性矩。和,3times;1列向量分别表示飞轮绕飞轮和车身固定轴的角动量。表示描述当分量从(Xf,Xf,Xf)旋转到(Xb,Xb,Xb)时在AUV主体固定轴中表示的动量分量的变换的旋转矩阵。
包括AUV运动效应,在AUV本体固定坐标系(Xb,Yb,Zb)中围绕各轴作用的力矩可以表示为;
(1)
这里表示相对角动量,表示飞轮经历的身体运动的偏斜对称形式(等同于叉积运算),即;
(2)
由公式和;
(3)
使用产品(AB)T = BT AT的转置,围绕身体固定轴的陀螺力矩可表示为;
(4)
如图1所示,假设飞轮围绕x轴(X f)进行限制,围绕z轴(Z f)进动,并且围绕y轴(Y f)具有角速度psi;, 并且飞轮和AUV质心位于参考体框架的原点处,并且参考体框架与身体的主惯性轴线重合;
(5)
(6)
(7)
其中旋转矩阵已经使用欧拉角来表示。 扩大Eq.4陀螺矩可以完全表示为;
(8)
假定由惯性,阻尼和恢复项组成的动力输出(PTO)机构,关于飞轮进动轴(Z f)的运动方程可以表示为;
(9)
其中Ig和Cg代表动力输出机构的惯性和恢复
全文共20198字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[14040],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

