英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
多机器人协作探索——见面还是不见面?
摘要:
协调的多机器人探索研究通常假定所有要探索的领域都是可自由访问的。这种普遍的假设并不总是成立,尤其是在灾难发生后的搜救任务中。房门可能是关闭的或者路径堵塞阻止了机器人继续探索。除此之外,还有许多其他类似问题,因此可能需要多个机器人去清理它们。本文讨论了如何协调多机器人系统来清除阻塞路径。我们定义了本地协作,并要求机器人在共同的位置上协作执行物理操作。协作机器人需要中断当前的探测,并移动到另外的位置以协作清除阻塞的路径。我们提出的问题是什么时候合作,谁与谁合作。我们提出四种合作策略。两个简单的策略是立即协作或延迟任何协作直到只剩下阻塞的路径,另外两种策略使用基于构建模式的启发式。虽然没有一种策略在所有情况下都是最优的,但是我们发现启发式减少了探索中需要考虑阻塞路径的未知环境的时间。
关键词:
协作 机器人探索 移动机器人团队 室内探索 多机器人系统 自主系统
1背景与意义
在探索未知环境的过程中,多机器人系统的协调在文献[12,17]中得到了广泛的讨论。尽管探索任务中机器人必须与环境进行互动以继续探索,特别是在多个机器人必须合作的地方,但它们受到的关注较少。异构机器人可以协作利用它们各自的特长[9],而同质机器人可以联合起来克服单个机器人的局限性[18]。在搜索和救援任务中,例子包括通过打开门、移动碎片、灭火、对伤亡人员提供急救和搜查伤员来清理路径。我们表示这种协作努力是本地合作。“本地”一词表示机器人需要在他们的直接物理社区,即一个帮助机器人必须中断当前任务,并前往请求机器人的区域。在协作完成后,帮助机器人可以恢复先前的任务。本地合作对搜索时间、运动距离和无线连接都有影响。
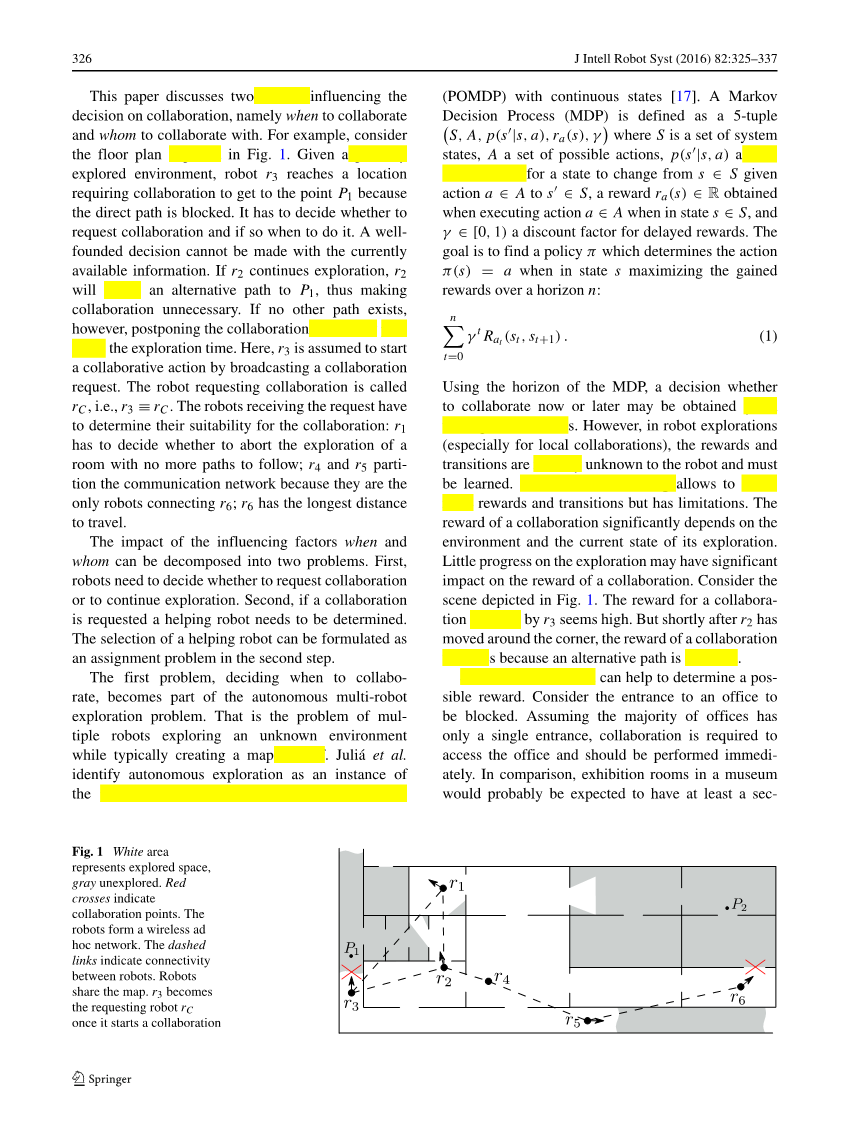
本文讨论了影响合作决策的两个因素,即合作的时机和合作的对象。例如,考虑图1所示的平面图。给定一个部分探索的环境,机器人r3到达一个需要协作到达点P1的位置,因为直接路径被阻塞。它必须决定是否请求协作,如果是,什么时候做。一个很好的决定不能只取决于当前可用的信息。如果r2继续探索,r2将会找到另一条路径到P1,从而使得协作变得没有必要。但是,如果没有其他路径存在,那么推迟协作就不必要地延长了探索时间。在这里,r3被假定通过播放协作请求来启动协作操作。请求协作的机器人称为rC,即r3equiv;rC。接受求助请求的机器人决定它们是否适合合作;r1必须决定是否放弃探索一个没有更多路径的房间;r4和r5划分了通信网络,因为它们是连接r6的唯一机器人;机器人r6有最长的运行距离。
影响因素——合作时机和合作对象可以分解成两个问题。首先,机器人需要决定是请求合作还是继续探索。第二,如果一个合作已经请求,那么辅助机器人需要被确定。辅助机器人的选择可以作为第二步中的分配问题。
第一个问题,决定何时合作,成为自主的多机器人探索问题的一部分。这是多个机器人探索未知环境的问题,同时通常会创建一个地图。将自主探索作为部分可观察的马尔可夫决策过程的实例。马尔可夫决策过程被定义为5元组(S,A,p(sacute;|s,a),ra(s),gamma;),其中S是一组系统状态,A是一组可能的动作状态,p(sacute;|s,a)是一个sisin;S状态的转换模型,代表着aisin;A到sacute;isin;S的状态关系。奖励函数ra(s)isin;R可以获得当前在sisin;S状态下的执行行动aisin;A,gamma;isin;[0,1)是一个延迟奖励的消极作用因素。目标是为了找到一个政策pi;,它决定了行动pi;(s)=a在状态s情况下的最大化收获的奖励超过了水平值n:
利用MDP的视野,在预期回报的情况下,决定是否进行合作。然而,在机器人探索中(特别是对于本地合作),机器人的奖励和转换最初是未知的,必须通过学习得到。强化学习可以决定奖励和转变,但也有局限性。协作的回报很大程度上取决于环境和其探索的当前状态。在探索过程中,很少有进展会对合作的回报产生重大影响。考虑图1所示的场景。由r3发起进行合作的奖励看上去很高。但是在r2转角之后不久,r3合作的回报就消失了,因为另一条路被揭开了。
语义信息可以帮助确定一个可能的奖励。考虑到办公室的入口被堵住了,假设大多数办公室只有一个入口,就需要通过协作来访问办公室,并且应该立即执行。通过比较知道,博物馆的展览室至少应该有两个入口。由于存在另一个访问路径,协作消耗的时间可能被延迟。但是目前的语义位置识别还不能得到可靠的检测[10]。
对POMDP的封闭形式解决方案在计算上非常复杂并且难以解决[17]。因此,大多数关于多机器人探索的文献都认为这个问题是一个分配问题。边界,即在已知的和未知的空间之间的过渡,是根据分配时可用的信息分配给机器人的。然后机器人到这些边界去增加对环境的了解。执行任务的目的是为了最小化搜索时间。包含如行程[5]、路径安全[11]、联系性[19]、地图质量[14]等约束可在分配过程中考虑。
我们关注的是能够可靠地获得当前机器人系统的信息,而不考虑语义知识。由于问题的复杂性,我们在随机环境中测试的启发式算法不会对分析产生偏差。本文对多机器人协同探测领域进行了如下方面的研究:
——定义本地协作的问题,
——讨论影响因素,
——并且通过仿真分析了四种协作策略的性能。
2相关工作
许多论文讨论了多机器人系统在探索过程中的协作[6,7,17,24]。然而,大多数论文的重点都是为了减少探索时间而协调机器人边界的分配。只有很少的论文关注于机器人之间的协作如何影响探索任务本身。Singh和Fujimura考虑了一个协作系统,大型机器人请求小型机器人帮助它们到达一些无法到达的地方[22]。Wurmetal提出一种有袋类机器人团队想法[23],其中运载机器人部署小型机器人来探索环境。其他形式的协作包括管理网络连接。Pei等人认为机器人在基地和探索机器人之间传递信息[21]。而de Hoog等人考虑到数据极端,以防直接连接无法达到[16]。Nevatia等人利用有经验的人员来协调他们的部分自治系统,完成一个完整的自治系统。他们认为在一个多机器人系统的组织中,包括人类在内的搜索和救援任务[20]。但是如果发生重大灾害,例如地震、洪水、飓风、全自动机器人系统就可以为不同的任务提供所需的技术人员。
在所有的情况下,要么假定道路可以完成勘探,或者任务的唯一目标是勘探。与此相反,作为早期动机的可能用例还没有得到解决。
3当地合作
我们首先正式定义上面描述的本地协作问题。
定义1 关于机器人群R的定义,本地协作是机器人riisin;R请求一个或多个机器人rjisin;R\{ri}j=(1,hellip;,|R|-1)的过程,加入到ri的位置去协同执行一个动作。
在需要进行合作时,可根据其相对重要性对当地合作进行分类:
1、关键和紧急:需要立即协作(不需要确定目标的优先级),
2、关键和非紧急:协作是关键任务,必须在任务目标完成之前执行,但可以推迟到稍后的时间点(目标优先级),
3、可选:协作是可选的,只在特定情况下才需要。例如,如果没有其他路径可以找到,清除通向房间的路径只能是强制的。
举个例子,这三个类别反映了适用在消防队员的程序[8]。在燃烧的建筑物中,例如,一旦有伤亡被发现,他们是否被救援取决于火灾的固有风险(1级)。营救伤亡人员可能被推迟,如果知道有些人被困风险更高(2级)。如果没有获得关于潜在伤亡的初步信息,消防员必须决定是否清除路径(3级)。
这篇论文考虑的是第三类。是否和何时合作是最具挑战性的,拥有最多的自由度。它并不一定需要协作,并且可以延迟它们,直到它们被最后遗落。可以根据给定的应用程序(例如可选的,但立即协作)构建可能的附加类,并将上述类的各个方面组合起来。为了说明,我们考虑了需要协作来清除继续探索的路径的情况。道路可以通过共同移动的碎片、打开的门或其他方式清除。
3.1什么时候合作?
定义2 一个环境被建模为一个无向图G=(V,E),其中有一组顶点V由一组边E连接。一组机器人R探索未知的环境G创建地图G=(Vacute;,Eacute;)。当机器人访问V时,将一个顶点visin;V添加到Vacute;中。一个环境是完全探索如果所有顶点visin;V访问,即V=Vacute;。
定义3 子集Lsube;E表示阻塞边缘需要当地合作的两个或两个以上的机器人让他们通行。在边缘上执行一次当地合作lisin;L,l是远离L,因此成为通行的。在下面我们将以两个协作机器人为考虑对象。
定义4 策略S定义了什么时候合作,谁与谁合作。我们将定义和比较四种不同的策略。
问题1 T为对未知环境进行完整探索所需的时间,t=[0,hellip;,T]是任务时间,liisin;L,i=1,hellip;|L|阻塞边缘ljne;lj(ine;j),并且tli是机器人什么时候去合作lisin;L。问题是要确定何时进行协作以最小化T,也就是说,
参数分T(G,R,S(tl1,...,tl|L|)) (2)
对于可选的合作,何时合作,是否合作这不仅仅是一个问题。如果阻塞协作优势lisin;L被证明是过时了,我们设置tl=infin;。
关于是否合作的决定成为一个问题,当有足够的信息来推断需要的协作时。例如,在图1中所示的图摘录中考虑r6。机器人r6必须决定是否请求协作清除路径,或者是否可以找到另一条尚未发现的路径。认为协作是必要的一个明显的选择是推迟任何合作,直到只剩下阻塞的路径。如果区域在未开发阻塞路径的后面,则需要协作。但是与r3相比,在可预见的未来,没有其他的机器人可以推出替代的路径。如果没有找到P2的替代路径,则需要比较高的旅费来返回r6的当前位置以清除路径。如果发现P2的另一条路径,不必要的协作将浪费时间和资源。
为了不需要在一个兴趣点周围探索整个区域,我们考虑了在建筑物中发现的不同类型的模式[1],并提出了由机器人应用的两种启发式算法来决定什么时候进行协作。第一个启发式使用了重复的建筑结构。例如,在一栋多层建筑中,机器人在探索其他楼层时,可能会使用已经探索过的楼层作为参考地图,它们认为在这两层楼之间会有类似或相同的结构。其他的例子包括公寓或住宅中的相同公寓。机器人选择了一条被阻塞的路径,如果机器人的当前位置和参考地图的边界之间没有其他路径,机器人决定进行协作。我们假设一个拓扑世界去表示顶点V表示房间和房间之间的E路径。
启发式1一个环境G包括分离的部分Giisin;{G1,G2,hellip;,GN}与相应的Vi,Ei具有相同或相似的结构。机器人已经完成了Gj到未知的环境Gk(j,k=1,hellip;,N;jne;k)进展,Gj和Gk具有相同的结构并且机器人被假定为意识到这一点。vk(1),v<s
全文共15247字,剩余内容已隐藏,支付完成后下载完整资料</s
资料编号:[14020],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。
您可能感兴趣的文章
- 拟人手臂的轨迹规划与轨迹跟踪控制外文翻译资料
- 新型磁性辅助内窥镜系统在上消化道检查中应用的可行性 和安全性外文翻译资料
- 基于FPGA可编程逻辑器件的复合视频图像处理外文翻译资料
- 从被测的高频域原始信号中提取巴克豪森噪声外文翻译资料
- 重型机床z轴热误差混合建模方法外文翻译资料
- 一个红外浊度传感器:设计与应用外文翻译资料
- 用于控制食物烹饪过程的电子系统.外文翻译资料
- 关于液体介质中电磁流量计的设计和理论上存在的问题。第二部分:关于带电粒子产生的 噪声理论外文翻译资料
- 基于LabVIEW和Matlab的小波变换对非平稳信号的分析仿真外文翻译资料
- 应用于腹腔镜手术的新型膜式加热加湿器 的开发外文翻译资料

