
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
圆形交通标志的检测与识别
作者:塞尔肯·卡普兰·贝尔卡亚
摘要
交通标志自动检测与识别在驾驶员等多个专家辅助和自主驾驶的系统中起着至关重要的作用,在这项工作中.提出了一种新的彩色交通标志检测与识别方法也是交通标志检测一种新途径,这种新途径利用一种新的圆检测算法和基于RGB的彩色阈值分割技术.提出在支持向量机分类框架中采用模式和Gabor特征。在其中包含了德国交通标志检测和识别方法的性能评价和检测与识别基准数据集.因此这些实验结果表明这两种方法都提供了比较好的或更好的性能和实时操作兼容性.
1介绍
在过去的十年中,数字图像中的交通标志的检测和识别一直是研究者研究的重点部分.美联社中的研究区域包括先进的驾驶员辅助驾驶系统、自主驾驶、建立和维护符号图等,还包括了交通信号检测和FIC符号识别、TSD处理识别区域、感兴趣ROI,和交通标志的给定边检部分。可以说一个好的TSD算法必须在图像中找到所有相关的交通标志,同时尽可能少地产生错误的检测。TSR处理给定图像块的分类。一个好的TSR应该能正确分类在预先形成的交通标志类集合中,可以对给定的图像打补丁,同时尽可能少地出现错误。
在本文中,我们提出了一种圆形交通标志的方法。这种方法我们采用了高速无参数圆检测,我们采用高速无参数圆检测算法用于检测。并提出颜色阈值算法来消除虚假检测。然后,我们定量评价每个广泛应用的检测算法的性能德国交通标志检测基准(GTSDB),我们得出这样的结论:提出了一种检测图像中大多数圆形交通标志的算法,在交通标志识别中,我们尝试不同的特征提取图片包括从方向梯度直方图(HOG)、局部二进制模式(LBP)、Gabor滤波器,以及它们的组合并使用支持向量机(SVM)进行分类。最后我们使用德国交通标志识别基准(GTSRB的方法。
本文的其余部分整理如下:第2节介绍了利用数据集对算法进行定量评价。
第3节介绍了有关工作的检测RithMS,提出我们的TSD算法和所提出的方法在GTSDB测试床内应用评价。在第4节中,我们回顾了关于TSR的文献,我们目前的TSR技术。拥有,并定量评估所提出的方法内GTSRB试验床。最后,我们在第5节中总结了这篇论文。
2交通标志数据集
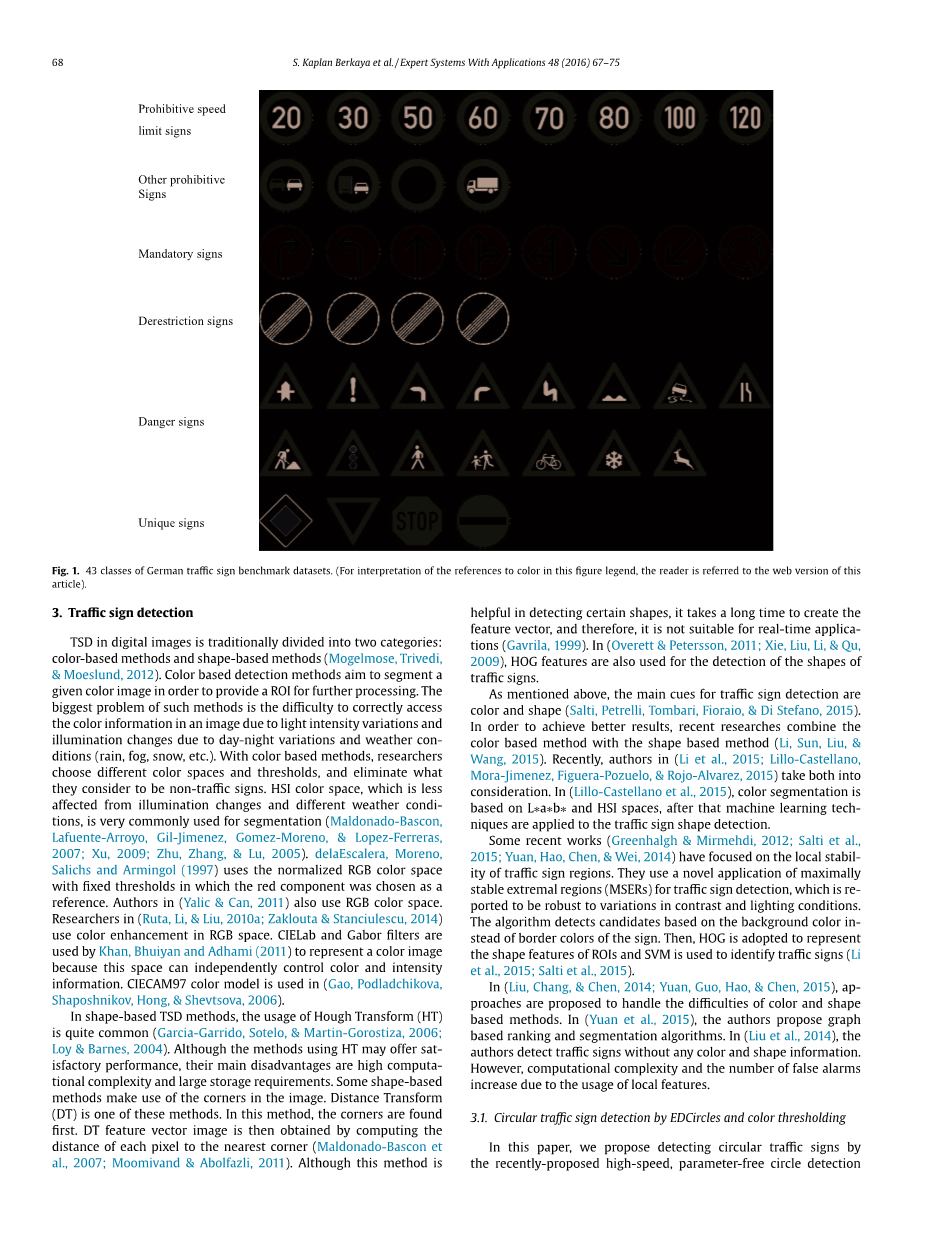
定量评价TSD和TSR ALGO的性能RithMS并比较和对比它们的性能算法广泛应用,广泛应用。使用德国交通标志基准数据集。显示了在不同亚组中的数据集中的交通标志类集合。GTSDB用于交通标志检测的性能评价算法,而GTSRB用于评价性能,交通标志识别算法GTSDB由600个训练和300个大小不等的测试图像组成。1360times;800像素。每个图像包含零个或更多的交通标志。不同的颜色和形状(HouBin等,2013)。GTSRB,另一个手,包括超过50000个注释从所有43个类交通标志(StalkAMP等,2011)。
3交通标志检测
数字图像中的TSD通常分为两类:基于颜色的方法和基于形状的方法。基于颜色的检测方法旨在分割给定彩色图像以提供用于进一步处理的ROI。这个这种方法最大的部分是难以正确访问。由于光强度变化而引起的图像中的颜色信息昼夜变化和天气变化引起的光照变化(雨、雾、雪等)。以颜色为基础的方法,研究人员选择不同的颜色空间和阈值,并消除什么他们认为是非交通标志。HSI颜色空间少受光照变化和不同天气条件的影响是非常常用的分割方法。莫雷诺Salichs和ARMIGOL(1997)使用归一化RGB颜色空间具有固定阈值,其中红色分量被选择为参考文献。作者(Yalic and CAN,2011)也使用RGB颜色空间。研究人员在RGB空间中使用颜色增强。CIELAB和Gabor滤波器用可汗、Bhuiyan和AdHAMi(2011)表示彩色图像因为这个空间可以独立控制颜色和强度。信息。CIECAM97颜色模型用于(高,Podladchikova,Shaposhnikov,洪,谢夫佐娃,2006)。
在基于形状的TSD方法中,使用Hough变换(HT)很常见(Garcia Garrido,Stoelo,Martin Gorostiza,2006岁);洛伊和巴尼斯,2004)。虽然使用HT的方法可以提供SAT等工厂化的性能,但是它们的主要缺点是高计算、复杂性和存储需求。在计算一些基于形状的方法利用图像中的角点时候,距离变换(DT)是其中的一种可行方法。在这种方法中,第一步要找到了角点然后通过计算得到DT特征矢量图像。让每个像素到最近角的距离(Maldonado Bascon et et)A.,2007;MOMOIVAND&RAPFAZZLI,2011)。虽然这种方法是有助于检测某些形状,需要很长时间才能创建特征向量,因此不适用于实时应用。(GavrILA,1999)。(2011);谢,柳,李,曲,2009)HOG特征也用于检测各种形状的交通标志。
如上所述,交通标志检测的主要线索是颜色和形状(萨尔蒂,Petrelli,Tombari,菲奥雷奥,迪斯蒂法诺,2015)。为了取得更好的效果,最近的研究结合了基于颜色的方法与形状为基础的方法(李,孙,刘,和王,2015)。最近,作者在(Li等人,2015;LILO Caselalo,Mora Jimenez,Figuera Pozuelo,Rojo Alvarez,2015)把两者都纳入考虑。在(LILO Caselalo等人,2015)研究中,把颜色分割中基于L*A B和HSI空间,之后机器学习技术将NIGEX应用于交通标志形状检测。最近的一些新的研究中(Grand Halgh amp; MiMeHdii,2012SalTi等)2015、元、郝、陈、魏、2014)关注地方稳定——交通标志区域的重要性。他们最大限度地使用了一种新的应用。交通标志检测的稳定极值区域(MSER)端口对对比度和照明条件的变化具有鲁棒性。该算法检测基于背景颜色的候选代替了符号的边框颜色。然后HOG被采用来代表ROIs和SVM的形状特征用于识别交通标志(李)等人,2015;SalTi等人,2015)。
在美联社提出了处理颜色和形状困难的方法中作者提出了图形检测基于排序和分割算法。在(刘等人,2014)中,作者在没有任何颜色和形状信息的情况下检测交通标志。然而,计算复杂度和误报次数太多使得局部特征的使用而增加。
在本文中,我们提出了通过检测圆形交通标志并且最近提出另外一种高速无参数圆检测方法,两者都有各自的优点和历史,尤其是EDC算法这种方法已经以前用于TSR(Gundz,卡普兰,Gunaland Akrar,2013)检测中。
从上面给出的伪代码可以看出,埃德兰灰度图像作为输入,并通过运行参数启动自由边缘检测算法,边缘绘制无参数(AkaLaLand TopAl,2012)检测各组分是线性像素链(步骤1)。接着从中提取圆弧。边缘段(步骤2)和弧组合在一起。生成一组候选圆(步骤3)。这是通过小组来实现的。弧具有相似的半径和接近中心坐标在一起。候选圆最终由亥姆霍兹原理验证。DeLoNex,MaiSon,Maell,2004, 2008)输出一组佩普图利有效圆(步骤4和5)。
亥姆霍兹原理是一种统计验证方法。它可以用来验证一组预定义的格式,例如边缘。段落、线段、圆弧、圆、椭圆等。基于计算完形理论的验证方法对象被检测为合适的背景模型的离群点。德索尼克斯等。显示一个合适的背景模型西安白噪声图像,其中所有像素,因此其梯度演讲都是独立的。并且根据理论,如果在测试中没有通过检测那么应该在高斯白噪声图像内做任何大的背景模型的偏差被认为是感知的。如果它对应于一个预先定义的格式塔,则是可见的,在这其中有个相关的案例揭示了关于亥姆霍兹原理圆验证的更多细节它的数学公式可以在原来的圆中找到纸。
如上所述,ED连接工作于灰度图像。自从我们正在使用彩色图像进行圆形交通标志检测,我们可以利用颜色信息来提高性能。利用颜色信息有两种方法:(1)首先,运行图像灰度级的EDCN来检测一组克勒斯。被检测的圆将是两个真实的CIR的边界。交通标志(真阳性)和其他循环非交通符号对象(假阳性)。然后我们使用颜色阈值。检测到的圆的像素,以消除错误检测。我们称之为方法得出颜色阈值化。(2)在第二种方法中,首先应用颜色阈值来获得二值图像,即然后喂入Ed圆圈来检测白色的圆形边界。阈值图像中的对象。我们称这种方法为颜色阈值。
彩色阈值法是交通标志检测中的常用技术还有不同的方法。因为大多数交通标志都是红色的或蓝色,阈值技术主要集中在这些两种颜色。一种技术是利用归一化RGB(RGBN)。颜色空间,呈现在(Gomez Moreno,Maldonado Bascon,吉尔希门尼斯,Lafuente Arroyo,2010)。这个空间用来减少照明变化的影响,并允许找到正确的阈值。
RGBN差异(RGBNDIFF)是探索的另一种方法。(Gomez Moreno等,2010)。这个空间对DE特别有用。包含黑白色的交通标志。这个想法是查找没有颜色信息的像素,即灰度像素,并通过它们。通过同时抑制具有颜色信息的像素。这是称为色/消色差分解。公式用于RGBNDIFF如下:(Gomez Moreno等,2010)
另一种方法是利用替代颜色空间。而不是RGB。HSV是一个这样的颜色空间,HSI和CIELab是其他。在我们的实验中,我们得出结论:HSV颜色空间是BET。TR用于检测蓝色交通标志与RGBN相比,但对红色交通标志的检测不产生良好效果。我们得出结论,表现最好的颜色空间是基于RGB提出的阈值算法。
4交通标志识别
在以前的文献中发现的TSR方法传统上被划分为两类:基于模板的技术和基于分类器的技术。
基于模板的方法是涉及基于像素的互相关模板匹配(de la Escalera,ARMIGOL,牧师,罗德里格兹,2004;皮奇奥利,德米切利,帕罗迪,坎帕尼,1996)。这种技术是简单的,但是在测试图像和模板时非常有用图像排列良好。然而,几何对准通常是特别是通过自动标志检测系统难以实现当图像在杂乱背景下被看到时受几何畸变影响。在这种情况下,识别性能下降很快。作者在(坎贝尔,Egestdt,如何,和MurRE,2010)使用DT模板匹配来分类循环三角形符号。在边缘图像上使用DTS增加了ReGGNIDEN性能。类似地,作者在(Ruta等人,2010A)中使用颜色距离变换,其中为每个计算单独的dt彩色通道。使用最近的进行分类。BOR模板匹配方法等都是很优秀的方法。
基于分类器的方法是基于机器学习技术的。在这些方法中,首先提取特征向量,降低计算复杂度的图像。然后利用SVM等分类器获得特征向量的BEL(Maldonado Basconetal,2007),神经网络(NN)(普列托和艾伦,2009)模糊回归树框架(Ruta,李,Lu,2010b)或基于随机森林的分类方法。
在特征提取阶段,HOG是最成功的一种,丰富的方法(谢等,2009)。作者(克鲁森,Wijnhoven,HabsChelb,DE与,2010)计算每个HOG描述符色彩通道整合色彩信息。在(扎克劳塔和斯坦)CululsCu,2011),作者使用不同大小的HOG特征和基于随机森林的分类器。最近,一个新的学习单隐层前馈神经网络的ING算法即极限学习机(ELM)已经被提出。使用这种基于HOG的特征、交通标志的新技术是分类的。
在本文中,另一方面,我们提出了一个合奏的特征包括HOG、LBP和Gabor在SVM CLAS中使,细化框架。每个特征提取方法是简要的,TSR方法的解释和实验工作的内容在下面的小节中提供。
4.1 HOG特征
2005年达里和特里格斯首次提出了基于HOG的特征的行人检测算法,之后,HOG也被使用在时态兴趣及其在许多其他模式识别的应用部分。TSR是其中的一个部分。背后的主要思想解释HOG方法是将图像表示为一组局部直方图。这些直方图由梯度方向和梯度组成震级的。
在将Sobel算子应用于图像之后,重新计算梯度和沙粒大小。图像分为子区域,每个区域称为块。一个街区与邻居重叠。每个块进一步划分为非被称为细胞的重叠区域。对于每个细胞,直方图是通过梯度方向和幅度来擦除。在这个过程中,为了更好地执行方向和幅度的分组。结果。例如,DalAl和TrimGs(2005)报告使用九箱提供了最好的结果。图像的特征向量是通过组合来自每个单元和块的直方图来实现。在这工作中,我们使用9个容器和288维特征向量,用于TSR的40times;40个图像贴片。
4.2 LBP特征
纹理分析在计算机视觉中占有非常重要的地位。在过去的几年中,研究人员已经开发出LBP,这不仅是简单的计算,但也非常有效的纹理
分析。LBP不受光强度变化的影响,这是该方法的其它重要性质。LBP的计算像素(X C,Y C)是通过在像素附近进行比较来实现的。而且文中也说得很清楚,对于8个邻居来说,中间值是灰色的。DLE像素被认为是一个截止值。如果灰度值相邻像素小于此截止值,函数给出0;否则,它给出1。图5示出了如何计算LBP。示例像素。对于(3times;3)窗口,中心像素由8个邻居组成。引擎盖像素和总共2个8=256个不同的LBP代码(模式)是
生成的,但不是所有的LBP代码被使用(Ojala,Pietikainen,和HAR)木材,1996)。相反,如果在0到1之间转换,则使用模式,代码是两次或更少,模式称为统一模式。
4.3. Gabor特征
Gabor滤波器是一种常用的特征提取技术。在计算机视觉和图像处理领(JEMAA)KhanFIR,2009;柳和韦克斯勒,2002)。当Gabor滤波器是应用于图像,具有相同的本地频率的像素。具有相同的本地频率和方向的像素将给出最强的响应,Gabor滤波器可以用数学表示。
在这项工作中,使用包含18个滤波器的Gabor滤
全文共6436字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13881],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

