
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
船舶拖带系统在风中的航向稳定性
A. Fitriadhya, H. Yasukawab, K.K. Kohc
a马来西亚丁加奴大学,海事研究和海洋科学学院,海事技术系,马来西亚
b日本广岛大学运输与环境系统系,广岛大学,日本
c海洋技术系,马来西亚特诺洛奇大学,马来西亚
摘要
本文提出了一个数值模型来分析被拖船在均匀恒定风速下的航向稳定性。使用不同角度和风速的数值分析记录了不稳定拖船和稳定拖船的影响。使用线性分析讨论了船舶拖带系统的稳定性调查,其中假定拖船的运动已给出。当拖船和被拖船的运动通过拖缆耦合作为船舶拖带系统的适当模型时,然后在拖带期间利用拖带轨迹捕捉它们的动态相互作用并使用非线性时域仿真进行分析。随着风速的增大,仿真结果显示,不稳定拖船的拖带不稳定性在迎着侧向吹来的风行驶时会得到恢复;然而,稳定拖船的拖带稳定性在船首位置和随风航行时会逐渐减弱。应该注意的是,这种拖带不稳定性可能会对拖缆张力产生冲击并可能导致严重的拖曳事故,例如拖缆断裂或碰撞。
关键词:稳定驳船;不稳定驳船;航向稳定性;风向角;风速;拖曳张力
1引言
船舶拖带系统的航向稳定性在静水和静态空气条件下至关重要。 实际上,拖船和被拖船总是以不同的方向暴露在一定程度的风中。需要使用理论或实验方法进行可靠的调查,以更深入地了解具有这些外部干扰的船舶拖航系统的航向稳定性。
近年来,关于船舶拖带系统在风中航向稳定性的若干研究探讨了拖船在不同风速和风向下的运动特性。Kijima和Varyani(1986)进行了线性分析,发现当风角从头部迎风变为顺风时,两艘拖船的航向稳定性往往变得不稳定。另外,Kijima和Wada(1983)提出被拖驳船的航向稳定性通常在四等分横向风范围内不稳定。Yasukawa和Nakamura(2007a)利用拖曳水池中的实验模型发现,不稳定被拖驳船的航向稳定性在四等分横向分范围内得到恢复。但是,在这项工作中,被拖驳船被解拖从拖轮上,即假定拖轮的运动已给出。
作为Fitriadhy和Yasukawa(2011)以前的工作的一项扩展研究,本文介绍了在均匀和恒定风力条件下船舶拖航系统航向稳定性的线性和非线性模型分析。在非线性分析中,对拖带系统的一个适当模型进行了建模,并且拖船和被拖驳船通过拖缆连接。考虑到风力作用于拖船和被拖船的风向区域的事实,这是相当合理的。因此,预测船舶拖航系统的航向稳定性的分析模型被认为是更可靠的。模型中考虑了风速和绝对风向角的影响。结合动态拖缆张力,应用二维集总质量法模拟拖缆运动,并采用自动驾驶系统来减少拖轮在所设定轨道上的航向偏差。这里所提出的数值方法预计会降低实验成本,即使模型测试验证仍然是建议需要的。
2数学模化
与动态拖缆张力有关的拖船和被拖船的操纵运动方程的数学模型涉及时域中的非线性三自由度,即涌浪,摆动和偏航运动。
2.1坐标系统
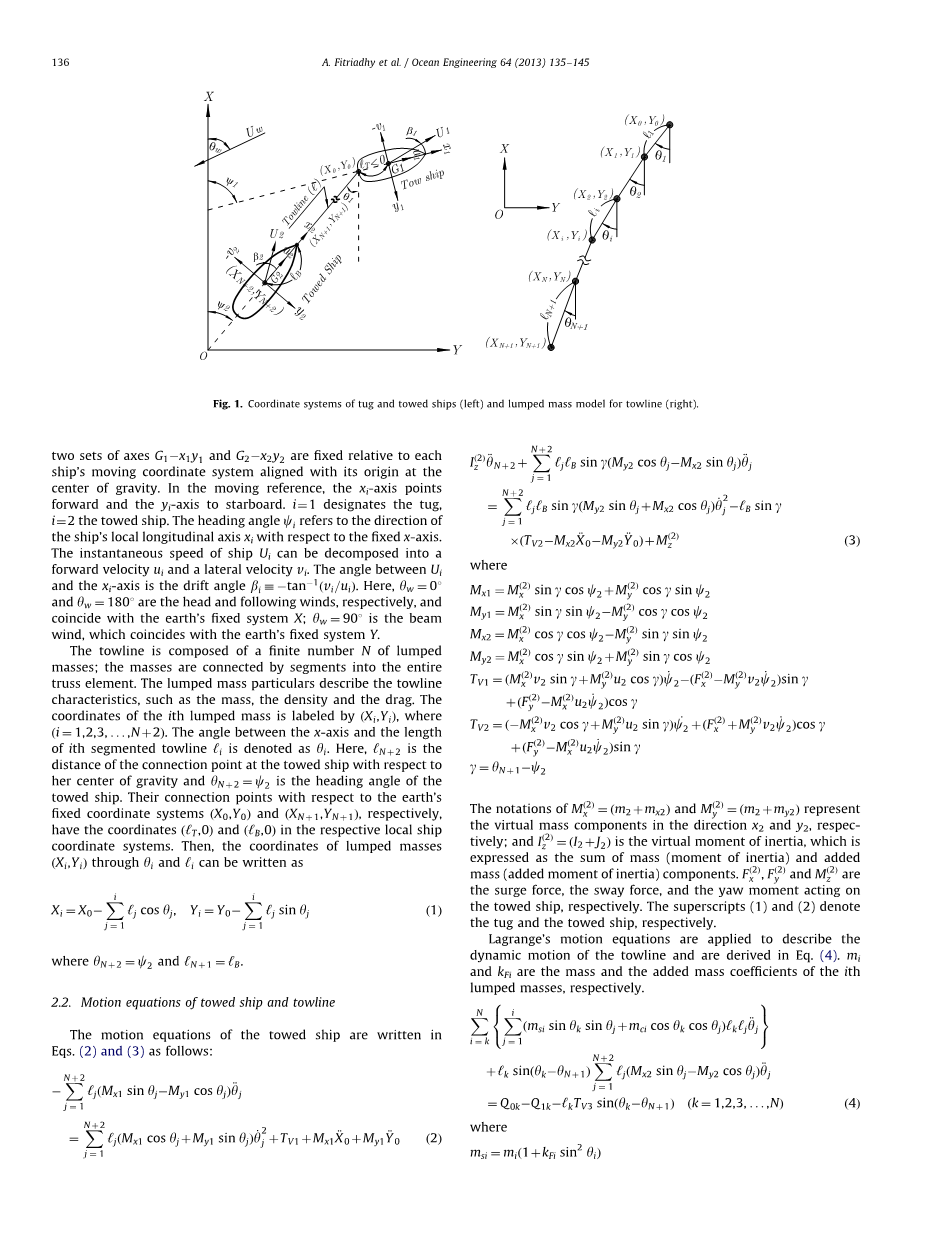
在推导拖船和被拖船的基本运动方程时,使用了三个坐标系,如图1所示。一组坐标轴固定在地球坐标系上,用于指定绝对风速和角度,记为O-XY,并且两组轴和固定在相对于在其重心处与其原点对齐的每个
图 1 拖船和被拖船的坐标系(左)和拖缆的集中质量模型(右)
船的移动坐标系上。在移动参考中,x轴指向前方,y轴指向右舷。i=1表示拖船,i=2表示被拖船。航向角指的是船舶局部纵轴xi相对于固定x轴所成的角。船的瞬时速度可以分解为前进速度和横向速度。和轴之间的角度是漂移角.在这里,和分别是迎风和顺风,并与地球的固定系统X一致;是横向风,与地球的固定系统Y一致。
拖缆由有限数量N的集总质量块组成; 质量块通过分段连接到整个桁架元件中。集中质量详细描述了拖缆特性,如质量,密度和阻力。第i个集中质量的坐标标记为,其中(i=1,2,3,hellip;,N 2). x轴和第i个分段拖缆的长度之间的角度表示为。在这里,是被拖船上的连接点相对于它的重心的距离,是被拖船的航向角。它们与地球固定坐标系的连接点(X0,Y0)和(XN 1,YN 1)分别在各自的本地船舶坐标系中具有坐标(,0)和(,0)。然后,集中质量的坐标(Xi,Yi)通过和可以写成:
(1)
这里
2.2拖船和拖缆的运动方程
拖船的运动方程如下(2)和(3)所示:
(2)
(3)
这里
=(m2 mx2)和= m2 my2的符号分别代表方向x2和y2的虚拟质量分量; 和=( I2 J2)是虚拟惯性矩,表示为质量(惯性矩)和附加质量(附加惯性矩)分量之和。和分别是作用在拖船上的浪涌力,摇摆力和横摆力矩。上标(1)和(2)分别表示拖船和被拖船。应用拉格朗日运动方程来描述拖缆的动态运动,并由式(4)导出。 mi和kFi分别是第i个集总质量的质量和附加质量系数。
(4)
在分段拖缆上作用两种不同的外力,如图1(右)所示。 这些力分解为法相和轴向力分量:
(5)
其中VCi = sin yi cos yi和UCi = cos yi sin yi。是水密度,是分段拖链的剖面面积,是法向力的系数,是轴向力的系数。
2.3拖轮的运动方程
拖轮的运动方程如下得到充分的推导:
(6)
(7)
(8)
其中和分别代表方向和上的虚拟质量分量,是虚拟惯性矩。和分别为作用在拖船上的浪涌力,摇摆力和横摆力矩。FTx,FTy和MTz分别表示作用于拖轮连接点的拖缆张力引起的浪涌力,摇摆力和横摆力矩,分别表示为:
(9)
(10)
(11)
Yasukawa等人表达了拖缆张力分量TX和TY。(2006年):
(12)
(13)
这里
拖轮牵引点处的合成拖缆张力可以表示为:
2.4作用于船上的力和力矩
船体,螺旋桨,方向舵和作用在拖船和被拖船上的风的外力和力矩方程用方程(14)表示。 之前的研究(Fitriadhy和Yasukawa,2011)描述了上述前三种力和力矩。
(14)
拖船和被拖船暴露在风力区域上的风力的估算以不同的速度和风角来建模。基于伊舍伍德(1972),风力和力矩的方程是:
(15)
这里
(16)
(17)
(18)
(19)
和的符号是力和力矩系数与(相对风向角)的函数关系。 是空气的密度; 和是前部和侧向投影区域。这里,和分别是风的绝对速度和角度。
3风场稳定性研究中运动方程的线性化
船舶拖带系统在风中的航向稳定性的研究涉及比平静水域更强的非线性。为了理解船舶拖航系统在风况下的基本机理,采用分段线性系统的航向稳定性模型是非常必要的。这种方法可以为识别稳定和不稳定的拖带状况在不同的角度和速度的风中提供了一个门槛。基于图2,已经考虑了几种简化:
- 运动在水平面上仅考虑(浪涌,摇摆,偏航)。
- 拖船(X0,Y0)的运动假定为Y0 = 0。
- 拖缆被视为不可延伸的悬链模型(N = 0)。
- 该虚拟拖轮以直线运动,其中和等于零,而。
这里,和被定义为稳定和不稳定的运动
(20)
(21)
其中和忽略不计;且。
3.1作用于被拖船上的力和力矩的线性运动方程
在风力条件下外力的基本线性化是基于相对风向角的,其有力地施加在被拖船的上层结构上,如方程(16)。关于的泰勒级数展开,然后被解为:
(22)
这里
图 2拖船在风中的线性模型坐标系统
相对风速平方项()在方程(17)可以重构为线性化形式:
(23)
风力条件下力和横摆力矩的方程()表示为(k=1,2,3),如下:
(24)
这里
且
那么,作用在船体上的水动力和力矩()表示为(k = 1,2,3),其表达式如下:
(25)
这里
参考方程(14)式中,总外力和力矩的线性化方程()表示为(k = 1,2,3),并采取以下形式:
(26)
这里
的符号是横向力和横摆力矩的稳定分量;和分别是关于和的横向力和横摆力矩的非定常导数值。
3.2拖船的航向稳定性
参考方程(2),被拖船的线性化方程式可写成下列形式:
(27)
同样,方程(3)变成:
(28)
这里
公式(27)和(28)分别是相对于和的无量纲化。L2,d2和U分别表示被拖船的长度和吃水以及牵引速度。将这些方程分解为无量纲的稳态和非稳态运动项,表达式如下:
稳定分量:
(29)
(30)
不稳定分量:
(31)
(32)
这里
从方程(29)和(30),得到变量和的值。通过将这些值相应地代入方程式(31)和(32),解出拖船的非定常运动方程。当风力系数等于零时,这项工作基本上遵循Peters(1950)和Shigehiro(1997)等人的方法。
无量纲运动是:
其中和分别表示拖缆长度和拖带点与拖船间距离与被拖船舶长度的比值,其中=l/L2和=lB/L2(lBgt;0)。
3.3航向稳定性准则
方程组联立求解可用于常风状态下直线运动的稳定性的评估,即运动中()。和的数值描述如下:
(33)
用等式(33)代入方程(31)和(32)中,有关的四阶特征方程应满足以下条件:
(34)
其中获得D0,D1,D2,D3和D4的值(见附录A)。在方程(34)中应用Hurwit方法,稳定性标准的基本解决方案写在方程(35)和(36)中。
(35)
(36)
4模拟条件
4.1船舶
表1列出了拖船和驳船的主要尺寸,包括它们在模拟中使用的横向和纵向风向区域。拖船和驳船的长度分别表示为L1和L2。拖船上的拖带点被表示为lT,并且其无量纲化为。为负值表示拖带点位于拖轮重心的后面。驳船的两种情况,即有和没有连接尾鳍,分别表示为“驳船2B”和“驳船2Bs”,以下分别
全文共20502字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13760],资料为PDF文档或Word文档,PDF文档可免费转换为Word

