
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
使用压电传感器将汽车玻璃转换成麦克风
收到日期:2015年8月17日/接受日期:2015年12月18日/网上发布:2016年1月5日
摘要:本文介绍了车窗作为外部报警信号的远距离声学传感装置的应用。目标是检测和定位警笛信号(例如救护车和警车),并通过视觉和听觉反馈提醒司机了解它的存在,以改善个人移动性并增加安全感。 作为声学天线工作的雷诺的玻璃窗户配备了大型50毫米外径压电陶瓷环,隐藏在门结构的下部以及挡风玻璃的下部和后窗。已经记录了玻璃对扫描激发的响应。 一般来说,玻璃板由于其固有的刚度而用作高通滤波器,并且仅提供很小的阻尼。 这种效应通过使用电荷放大器电子电路来补偿。示出了在静态条件下最高达120m的检测能力以及行驶条件下的风和振动的影响。 最后,报告两个警报检测情景,一旦汽车经过一个静态警报源,并且一旦与行驶方向正交,则通过该警报源。
1介绍
目前在救护车,警察巡逻车和消防车辆等紧急车辆中实施了三种不同类型的警报:闪烁的灯光,彩色的车身标记和声音警报,声音警告是最突出的系统。 与闪烁的灯光和彩色的车身标记相比,即使在交通密集的情况下或建筑物隐藏时,警报器在理论上也允许紧急车辆的定位。
然而,几乎所有的驾驶者都面临这样的情况:他可以听到警笛声,但在正确定位其位置时遇到困难。 这会导致反应时间增加和错误的机动让路,这有时会导致事故发生。 根据德国联邦公路研究所的资料,与普通车辆相比,应急车辆在发生严重伤害的交通事故中的风险高出8倍。 致命事故多达4倍,高财产损失的风险高出17倍。尽管这些事故中只有30%是由于汽车司机的错误行为(60%是由紧急车辆司机引起的),但错误的反应显着减缓了急救车辆的步伐.
今天,汽车制造商在改善隔音和整合强大的汽车娱乐系统方面付出了很多努力。 再加上城市噪声污染增加,紧急警报器很可能被掩盖比以前要多,这使其检测和本地化变得复杂。 另一项研究发现,人类无法正确定位紧急警报器的原因是由于警笛模式和限制。解决这个问题的一个可能的解决方案是将系统集成到汽车中,检测和定位警笛信号,并通过适当的距离和方向信息向紧急车辆的驾驶员发出警报。 全球定位系统(GPS)可以定位车辆的位置。
电子设计
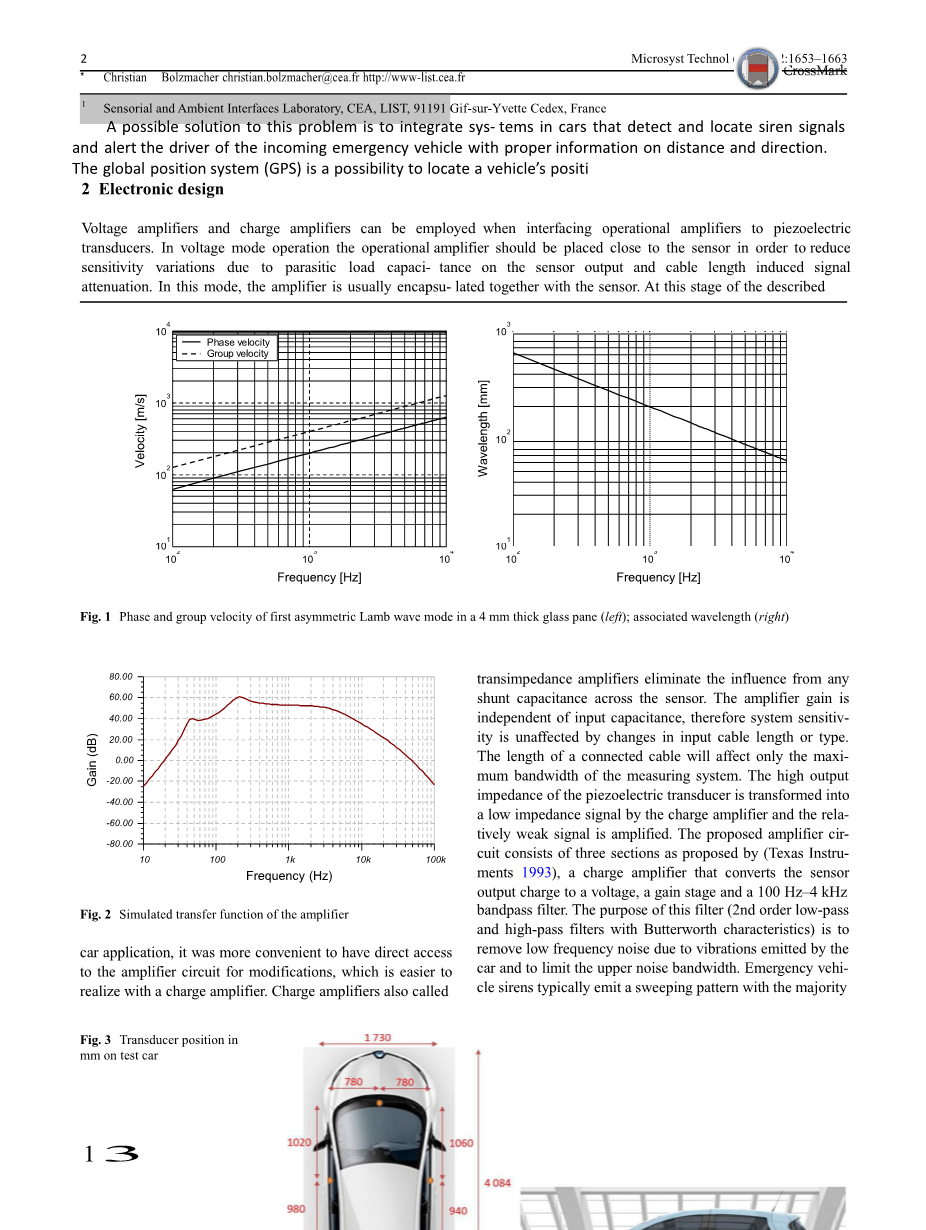
将运算放大器连接到压电传感器时可以采用电压放大器和电荷放大器。 在电压模式下,运算放大器应放置在传感器附近,以减少由于传感器输出端寄生负载电容和电缆长度引起的信号衰减导致的灵敏度变化。 在这种模式下,放大器通常与传感器一起封装。 在描述的这个阶段汽车应用中,直接访问放大器电路进行修改更为方便,这通过电荷放大器更容易实现。 电荷放大器也叫互阻抗放大器,它消除了传感器上任何并联电容的影响。放大器增益与输入电容无关,因此系统灵敏度不受输入电缆长度或类型变化的影响。连接电缆的长度只会影响测量系统的最大带宽。 压电传感器的高输出阻抗被电荷放大器转换成低阻抗信号,并且相对较弱的信号被放大。一个电荷放大器,可将传感器输出电荷转换为电压,增益级和100 Hz-4 kHz带通滤波器。 该滤波器(具有巴特沃斯特性的二阶低通和高通滤波器)的目的是消除由汽车发出的振动引起的低频噪声,并限制较高的噪声带宽。 大多数情况下,紧急车辆警报器通常会发出扫描图案的声能在500-1500 Hz范围内。考虑到一些基于国家的频率变化并且有可能检测到更高的谐波,从100Hz到4kHz的频率范围似乎是足够的。图2显示了放大器的模拟传递函数。在期望的频率范围内可以获得最大50dB的连续放大。200赫兹左右的小凹陷达到60 dB的放大倍数有助于补偿玻璃在低频时与小输出信号有关的刚度。
图1 4 mm厚玻璃板中第一个不对称兰姆波模式的相位和群速度(左); 关联波长(右)
图2放大器的模拟传递函数
图三测试车上的传感器位置,单位为毫米
图4标准化的挡风玻璃反应(左上),右后玻璃(右上),后玻璃(左下)和左后玻璃(右下)到距离3 m的100 Hz至5 kHz正弦扫描和1 m处1 kHz处80 dB的声压级
集成和测试设置
雷诺Zoeacute;测试车中已经集成了六个压电传感器。 玻璃面板配备有大型50毫米外径的压电Pz26环来自Ferroperm,隐藏在门结构的下部以及挡风玻璃的下部和后窗,以便使用者看不见并且受到环境影响。 来自3Mtrade;的由两部分组成的Scotch-Weldtrade;环氧粘合剂DP 110已经用于将压电陶瓷粘合到玻璃板上。 使用这种胶水,在机械稳定的同时可以获得良好的声学传输。 随着侧窗移动和汽车持续受到振动,压电陶瓷的布线更具挑战性。 因此,电线首先用压缩弹簧夹紧在玻璃板上,然后粘合以确保最大的稳定性。 图3显示换能器的确切位置。 必须注意的是,当打开窗户时,侧窗上的换能器位置可以改变。 盲目的电线已被彻底隐藏在汽车塑料盖后面并引向中央控制台。
在静态测试期间,被测窗口和参考麦克风连接到电荷放大器模式下使用的PCB Piezotronics的四通道信号调节器Model 482C54。 预处理后的信号通过National Instruments USB-6210数据采集卡在LabView 8.2中记录并保存在文本文件中。 采样率是22.05 kHz。 后处理在Matlab 2008b中进行。 信号通过Labtec Spin S2-51扬声器扩散。 使用参考麦克风进行录音也可以连接到该信号调节器,以便在后期处理过程中更好地进行信号比较。 用PCB Piezo-tronics 378B02 1/2“预极化自由场电容式麦克风记录参考信号。 在动态测试过程中,将四个窗口(挡风玻璃,后窗,左右后窗)连接到“Sect. 3”。 在最终的应用中,前窗将用于声音再现,其中窗户充当扬声器。
图5记录的信号衰减距离声源的距离
实验结果:静态测试
玻璃麦克风对扫频激励的响应
首先,记录挡风玻璃,左右后窗以及后窗对扫描信号的响应。 因此,用任意函数发生器产生100 Hz至5 kHz的5 s线性正弦扫描,并通过扬声器以3 m(80 dB @ 1 m和1 kHz)的距离播放。图4显示相应的传输功能。
检测限制
检测极限已经通过任意函数发生器产生的90 dB警报类警报信号进行了测试。 它包含较低(380 Hz)和较高(620 Hz)频率。 这辆车被安置在不同的距离
距警报源10米,挡风玻璃面向源。 汽车开着,但没有移动。图5显示了两个不同频率的衰减依赖性。 高频部分的衰减较低。
实验结果:动态测试
风和振动对信号的影响
在这个实验中,测量了风和振动对捕获信号的影响。 Ryght Y-Storm扬声器放置在发动机罩上挡风玻璃中心1米的距离处。 扬声器以不同的行驶速度(0 km / h,40 km / h和80 km / h)播放对数100 Hz至5 kHz的正弦扫描,并使用挡风玻璃麦克风进行测量。 在0 km / h频谱图中可见的测量噪声(图6)在整个频率范围内均匀,可能是由于电子电路中的热噪声。 从这些图中可以清楚地看出,风和振动分别引起主要位于700Hz和1.2kHz以下的低频噪声,分别为40km / h和80km / h的行驶速度。 图中有一些恒定的噪声信号。由汽车内部系统如空调呼吸器(1.2 kHz @ 0 km / h,2.4 kHz @ 40 km / h)和转向助力器或类似的电气车载系统(水平线@ 3.1 kHz)引入。
低驱动速度下的警笛检测
在这次测试活动中,汽车一旦指向汽车并与驾驶方向正交,就会通过声源(休息时)。 录制已经用“Sect. 3“和一个NI USB-6210数据采集卡。这些测量仅使用四个窗口(挡风玻璃,后窗,后左侧和右后侧窗)。 测试已经在环境噪声水平为54 dB的户外环境中进行。 该测试使用由任意函数发生器生成的90 dB警报类警报信号进行,并使用真力6010A扬声器进行扩散。它包含一个较低(400 Hz)和一个上限(600 Hz)以1 Hz调制的频率。 在第一个实验中,汽车通过图8所示,右侧的声源和扬声器转向汽车。采集开始于扬声器位置前约30米处,同时仍以30公里/小时的最高速度加速,并在扬声器位置后停止30米。
图8显示四个窗口的时间痕迹麦克风模式。 汽车在7秒后到达警报信号源,可以在挡风玻璃麦克风信号上看到。由于汽车部分隐藏了声音,与其他窗口相比,位于警报源对面的右后窗捕获的信号较少。接下来,左后窗测量声音信号,最后,后窗提供最高信号强度,峰值电压为8 s。
图9 和10 分别描绘挡风玻璃,右后窗,后窗和左后窗的频率响应和相关频谱图。 汽车加速并在3秒后达到30公里/小时的最高速度。这个加速阶段可以在频谱图中看到,噪声级覆盖更大的频带。报警信号大约在同一时间(2.9秒)开始,并在9.9秒时停止。 当接近声源时,人们可以清晰地识别出警报信号的强度。 频率响应显示基频和谐波。 尽管后窗提供了最高的信号强度,但基本原理和谐波似乎更加明显挡风玻璃和左后窗都面向报警源或放置在同一侧。频率图中可见的衰减分别少得多。一些汽车内部系统以频率为主要组件干扰信号3.1 kHz(在谱图中可以看到一条线)。这条线或多或少地取决于电缆布线。
用扬声器正交于行驶方向进行第二次测试,如图11所示。这第二次测试的时间痕迹显示在图12。该行为与第一次测试类似,但在面对报警源的左后窗上具有更多信号强度。 后窗再一次提供了可能有几个原因的大部分信号。与其他窗口相比,整个表面相对较大并且厚度减小,这有利于声音检测。 一个薄的大表面比小的或厚的表面更容易振动。 此外,后窗稍微弯曲,具有指向报警源的小部分,如图11。
相关的频率响应和频谱图显示在图13 和14。 汽车加速并在2秒后达到30公里/小时的最高速度。 报警信号大约在1.9秒后开始,在7.6秒后停止。 与第一次测试相比,当汽车接近警报源时,谐波不太明显。 这可以用扬声器的指向性来解释,并且更高的频率比较低的频率衰减得更快。 面向报警源的左后窗非常好地捕捉到了报警信号的基本频率。 人们可以预料,一辆带有激活的紧急喇叭的救护车可以驶向试验车与以前的测试一样,可以用更多的谐波信息来检测。 在此测试过程中,出现了3.1 kHz旁边的一些新噪声信号,并可以在频谱图中看到。 提交人无法确定这些骚乱的来源。
图6在0 km / h,40 km / h和80 km / h时记录100 Hz至5 kHz正弦扫描的挡风玻璃麦克风频谱图
图7汽车在右侧通过声源(指向汽车)的动态测试的设置
图8玻璃麦克风的时间轨迹; 指向汽车的声源
图9轿厢在距离2米处右侧通过90分贝声源(面向汽车)显示了四个窗口的频率响应
讨论
汽车玻璃可以用作一些特殊应用的麦克风。检测音频信号所需的高放大率还放大了可能掩盖真实信号的任何其他噪声。通常,所描述的原理用于检测结构中的小振动,并且被称为用于电吉他的接触式麦克风。这意味着任何振动或真正的接触施加在窗口被检测到比空中声音强得多。 在较高的行驶速度下,振动和风噪声的掩蔽效应会影响适当的紧急车辆警报检测能力,如图6。
使用电荷放大器的选择似乎是合适的。 声阻抗失配已被电荷放大器部分补偿,如图4。但似乎录制的信号是相当于噪音没有任何过滤器,可以在静态实验中看到。 在用于动态测试的电子电路中实现100 Hz至4 kHz带通滤波器有助于降低振动噪声,但对于警报检测和定位可能更窄。尽管电缆是屏蔽的,但将电子部件放置在更靠近传感器的位置可能很重要,以防止记录来自其他汽车部件的噪音。
从静态测量结果中,估计5 kHz带宽上放大后的平均灵敏度。 假设玻璃的传声器灵敏度只在少数几个谐振频率下很好,而在其他谐振频率下则很差,如图4,如果有足够的频率覆盖音频频谱,则认为玻璃灵敏度可以以mV / Pa表示。在这种情况下,与使用Piezotronics信号调理器的PCB Piezotronics参考麦克风(灵敏度为50 mV / Pa)相比,玻璃的平均灵敏度为27 mV / Pa。
进一步的测量表明,可以检测到距离大约120米的90分贝信号。在真实的报警信号(110dB)的情况下,可以估计能够检测到高达200m的信号。这对于这种设备来说是重要的发现,以便在实际应用中有效。
不同的车窗在感性方面表现出完全不同的行为。这是由于共振,这是几何,材料以及驱动条件依赖 因此,为了在相同的激励下获得相同的信号强度,很难调整玻璃麦克风。 基于振幅的检测和定位方法仅在特征的实时补偿时才是合理的模式被引入。 因此基于相位延迟的算法更适合于无补偿地检测和定位。该声明已经在动态测试结果中得到了快速验证。已经观察到,当使用声学汽车玻璃时,相位不稳定。这可能是由于相关频段存在各种共振。考虑到谐波,可以推断出警报信号的一些基本方向信息。建议的系统可以作为报警检测的替代解决方案,提供报警到达方向的快速信息,例如LEFT / RIGHT
全文共5880字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13603],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

