无人水面船:发展和挑战的概述
摘要
随着全世界对海洋和浅水相关的商业,科学和军事问题越来越感兴趣,对具有先进引导,导航和控制(GNC)能力的无人水面船(USVs)的发展需求也相应增长。本文提出了对USVs发展近期进展的全面文献回顾。本文首先概述了历史和近期的USVs发展情况以及一些基本定义。接下来,根据各种标准(如应用,方法和挑战)对现有USVs的GNC方法进行概述和分类。最后,强调了USVs对于更实用的GNC能力的更普遍的挑战和未来方向。
1绪论
1.1 背景
大约三分之二的地球被海洋覆盖(Yuh,Marani, amp; Blidberg, 2011),但只有相对不太多的领域已经被彻底探索。气候变化,环境异常,人员需求和国家安全问题都导致了商业,科学和军事社区对开发创新无人水面船(USVs)的强烈需求,这种船也称为自主水面船(ASVs)或自主水面艇(ASCs)。尽管如此,只有半自主USVs被普遍应用而全自主USVs未被普遍应用,这是由于后者面临的诸多挑战,例如由于自动化和可靠引导方面的挑战而导致的自主性有限,面对复杂和危险环境以及传感器,执行器和通信故障的所有不同操作条件下的导航和控制(GNC)功能。为了最大限度地减少人为控制的需求以及由于人为错误而对有效,安全和可靠的USVs操作的影响,需要进一步开发完全自主化的USVs。
USV可以定义为能在各种混乱的环境中执行任务,无需任何人为干预,并且基本上呈现高度非线性动力学(Breivik,2010)的无人船。预计USVs的进一步发展将带来巨大的收益,如降低开发和运营成本,提高人员安全和保障,扩大运营范围(可靠性)和精度,提高自主性,以及在复杂环境中提高灵活性,包括所谓的肮脏,枯燥,苛刻和危险的任务。(Bertram, 2008; Breivik, 2010; Breivik, Hovstein, amp; Fossen, 2008; Roberts amp; Sutton, 2006)
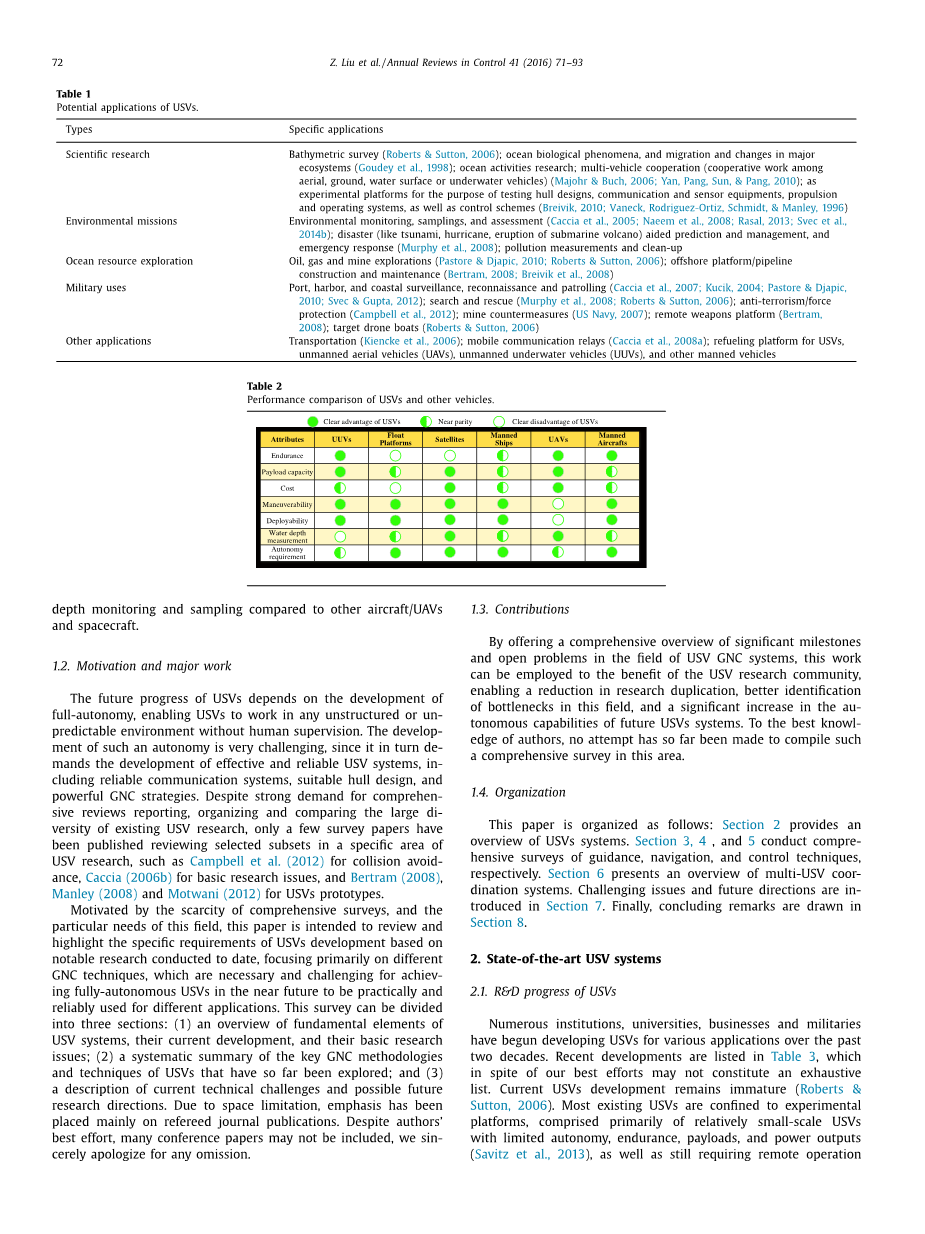
借助包括全球定位系统(GPSs)和惯性测量单元(IMUs)以及更强大和可靠的无线通信系统(Manley,2008)在内的更有效,紧凑,商用和价格合理的导航设备,已经为USVs及其应用提供了前所未有的机遇。以科学研究,环境任务,海洋资源勘探,军事用途和其他应用等具有成本效益的方式,可开发USVs以用于广泛的潜在应用(如表1所列)。
就某些特定的应用而言,USVs总是与其他有人或无人系统有竞争关系(Savitz et al., 2013)。表2提供了这些系统的简要比较,并且可以发现USVs的以下优点:(1)相对于载人船,USVs可以执行更长时间和更危险的任务;(2)由于没有船员在船上,因此维护成本更低,人员安全性更高;(3)USVs的轻重量和紧凑尺寸使它们在较大的船舶无法有效行驶的浅水中有着更高的可操作性和可部署性;(4)与其它飞行器/无人机和航天器相比,USVs也具有更大的潜在有效载荷能力,并且能够执行更深的水深监测和采样。
1.2 动机和主要工作
USVs的未来进展取决于全自主的发展,使得USVs能够在没有人为监督的情况下在任何非结构化或不可预测的环境中工作。这种自主性的发展非常具有挑战性,因为它反过来要求开发有效可靠的USV系统,其中包括可靠的通信系统,合适的船体设计和强大的GNC策略。尽管对全面评估报告,组织和比较现有USV研究的大量多样性有着强烈的需求,但只有少数回顾USV研究的特定领域中选定的特定区域的调查文章被发表了,如Campbell et al. (2012)的避免碰撞,Caccia (2006b)的基础研究问题以及Bertram (2008), Manley (2008), Motwani (2012)的USVs原型。
受全面调查的稀缺性以及该领域的特殊需求的驱动,本文旨在回顾并强调基于迄今为止进行的显著研究的USVs发展的具体要求,主要侧重于不同的GNC技术,这些技术对于在不久的将来实现完全自主化的USVs以实际可靠地用于不同的应用是必需的和具有挑战性的。本调查可分为三个部分:(1)对USV系统的基本要素,目前的发展情况以及它们的基础研究问题的概述;(2)对于迄今为止探索的USVs的关键GNC方法和技术的系统性总结;以及(3)对当前的技术挑战和未来可能的研究方向的描述。因为篇幅有限,所以将重点主要放在了期刊出版物上。尽管作者尽了最大的努力,但许多会议论文可能不包括在内,我们对任何遗漏表示诚挚的歉意。
1.3 贡献
通过全面概述USV GNC系统领域的重大里程碑和未解决的问题,这项工作对于USV研究团体大有裨益,可以减少重复研究,更好的识别该领域的瓶颈,并显著提高未来USVs系统的自主能力。据作者所知,目前还没有人尝试编写这方面的综合调查报告。
1.4 编排
本文编排如下:第2节提供了USVs系统的概述。第3,4,5节分别对引导,导航和控制技术进行全面调查。第6节介绍了多USV协调系统的概况。第7节介绍了具有挑战性的问题和未来的方向。最后,在第8节进行总结。
2 先进的USV系统
2.1 USVs的研究与开发进展
在过去的二十年中,许多机构,大学,企业和军队已经开始开发用于各种应用的USVs。表3列出了最近的事态发展,尽管我们尽了最大的努力,但可能没有将其全部列出。目前的USVs发展仍不成熟。大多数现有的USVs仅限于实验平台,主要由相对相对较小规模的USVs组成,其具有有限的自主权,耐力,有效载荷和功率输出(Savitz et al., 2013),并且仍需要远程操作(Breivik et al., 2008)。商业市场上的USVs仍然稀缺,大多数工业级USVs仍在军事和研究应用中使用。关于所开发的原型容器和基本设计问题的概述,读者还可以参考Bertram(2008), Manley(2008)和Motwani(2012)的出版物。
2.2 USVs的要素
根据实际应用,USVs可能具有各种外观和功能。但是,以下基本要素必须包含在每个USV中:
- 船体和辅助结构元素:船体变化可以分为四种不同的类型之一:刚性充气船体(Motwani, 2012),kayaks(单体船)(Curcio, Leonard, amp; Patrikalakis, 2005),catamarans(双体船)(Naeem, Xu, Sutton, amp; Tiano, 2008),和trimarans(三体船)(Peng, Han, amp; Huang, 2009)。这些船体设计的变化对应不同的USV应用,揭示了USV开发中的一些基本设计问题和趋势。刚性充气船体适用于军事应用,主要是因为它们的耐用性和有效载荷能力更强。单体船和双体船设计因其便于安装和装载而广受欢迎。此外,单体船的USVs易于研制或从载人船改造。双体船和三体船USV通常是首选,因为它们具有更高的系统稳定性,降低了在水中倾覆的风险(Campbell et al. , 2012),同时提供更大的有效载荷能力和冗余度。
-
推进和动力系统(Khare amp; Singh, 2012):大多数现有的USVs的航向和速度控制分别由方向舵和螺旋桨(或喷水式)推进系统提供,而另一些(主要是双体船USVs)则由差动推力操纵,由两个独立的电机提供给每个船体。但是,这些USVs通常不配备额外的侧面驱动器,因此可以被视为欠驱动的USVs。换句话说,可用的驱动器数量少于运动中的自由度(DOF)。这对于欠驱动的USVs的安全和精确控制是一个重大挑战。其它全驱动或过驱动的USVs相对于欠驱动的USVs更容易操作,但
全文共32642字,剩余内容已隐藏,支付完成后下载完整资料

英语原文共 23 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13164],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

