英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
目录列表可在ScienceDirect
机械系统和信号处理
期刊主页:www.elsevier.com/locate/ymssp
带速度控制系统的柴油机扭振控制联轴器
郭宜宾a,利万友a,uArr;,于舒文b,肖涵c,苑云波a,王志鹏a,马秀珍a
a哈尔滨工程大学动力与能源工程学院,黑龙江哈尔滨,中国
b中国海洋设计研究院(MARIC),中国上海
c上海船用柴油机研究所(SMDERI),中国上海
a r t i c l e i n f o
文章历史:
2016年9月17日收到
以修订后的形式收到2016年11月26日接受2017年1月11日
2017年2月24日在线提供
关键词:
耦合模型
轴系扭转振动速度控制
速度振荡
摘 要
柴油机轴系扭振与速度控制系统之间的耦合问题非常普遍。 忽视耦合问题有时会在发动机运转过程中导致严重的振荡和振动。 例如,在柴油机的推进轴系操作期间,发动机转速的振荡和齿轮箱的剧烈振动导致发动机无法运转。 为了找出故障原因,提出并研究了一种将变频调速系统与变形轴系扭转振动耦合的仿真模型。 在耦合模型中,轴系被简化为一个由多个惯性和轴部分组成并具有扭转振动特性的可变形轴系。 该模型的瞬时转速结果与试验结果吻合良好,能够很好地反映发动机运行的实际振荡状态。 此外,使用所提出的模型,可以调整速度控制参数以预测柴油机稳定和安全的运行。 具有一组调整控制参数的柴油机试验结果与模拟结果非常吻合。
copy;2017 Elsevier Ltd.保留所有权利。
- 介绍
柴油机通常用于船舶领域,柴油机的可靠性与海上安全有关。 存在影响柴油机运行的典型耦合问题。 在9缸和功率为4500千瓦的柴油发动机运转期间,发动机转速的振荡和齿轮箱的剧烈振动都会发生。 从400转/分开始,发动机的转速逐渐增加。 当接近约450r / min时,调速器臂开始振动并且速度的波动开始增加。 当接近540r / min时,波动范围达到20r / min,发动机转速发生振荡,导致发动机无法正常工作。 这种现象是由驱动轴系的动力学与柴油机控制系统的耦合引起的。
耦合问题已经引起了广泛的关注,特别是在电力行业或直升机行业等高度可靠性要求较高的行业的研究领域。 在连接到电子网络的涡轮机组过程中出现的自振不仅在理论上得到了成功的解释,
uArr;通讯作者:哈尔滨工程大学电力与能源工程学院,哈尔滨150001
电子邮件地址:hrbeu_ripet_lwy@163.com (W. Li)。
http://dx.doi.org/10.1016/j.ymssp.2017.01.017 0888-3270 /copy;2017 Elsevier Ltd.保留所有权利。
相符。 与此同时,为解决自振荡问题开发了许多数学耦合模型,如电 - 机耦合模型,耦合轴系扭转振动到电子网络的分析模型以及耦合燃气蒸汽联合循环的扭振模拟模型拥有电子网络的单位等[1,2]。 高[3] 提出了理论研究,并提出了一种主动振动控制方案,用于控制大型汽轮发电机组转子轴的扭振,结果表明,全状态反馈控制对扭转振动能量的衰减和涡轮发电机的响应具有显着的效果轴系统。 大厅[4,5] 建立包括齿轮和轴模型的风力涡轮机模型,以研究如何通过实施可变比率变速箱(VRG)来提高固定速度风力涡轮机的捕风能力。 白色[6] 通过主动控制发电机转矩,研究了转子轴扭转振动的减少,其中传动系由转子的质量和惯性以及转子轴的刚度和阻尼组成。 在直升机研究领域,为了解决扭转振动问题,开发了许多模拟模型来处理传动链和速度控制系统之间的耦合问题。 其中,传动链系统对速度控制系统的耦合扭转振动模型以及人机,直升机与速度控制系统之间的耦合模型,其中人为效应被纳入耦合账户[7–9]。 帕维尔[10] 概述了旋翼机驾驶员联接(RPC)问题的最新技术,强调了该领域未来的挑战。 张[11] 建立了直升机/涡轴发动机系统,该系统具有复杂的耦合关系,包括直升机开环模型,飞行控制器,涡轮轴发动机开环模型和发动机控制器四部分。 太阳[12] 重点研究了转子叶片和转子控制系统的气动弹性分析,结果表明斜盘的惯性对伺服负载的高频谐波有显着影响。
然而,在柴油机等往复机械领域,柴油机的耦合振荡问题非常普遍,但目前关于耦合问题的研究较少。 通常,速度控制部分和扭转振动部分分别研究。 船级社规则只对两部分单独作出要求,对联轴器问题根本没有要求[13]。 在研究速度控制系统的仿真时,通常将轴系视为具有单一惯性的刚性轴,忽略轴系可变形[14–16]。 陶[17] 提出了一种基于动态表面控制的弹性海洋轴系的自适应中立网络控制方法,以减少螺旋桨流体激励引起的轴系扭转振动,该研究的局限性是不考虑整个轴系扭转振动与控制系统。 Ouml;stman[18] 提出了一种通过平衡汽缸转矩贡献与曲轴系统的测量角速度来减小曲轴的扭转振动的方法,这导致柔性联轴器的热负载显着减小。 唐[19] 建立了一种新型的简化扭振模型来研究复合行星混合动力推进系统的扭振特性,并用简化模型来准确描述低频振动特性。 本研究为振动控制系统的耦合仿真提供了依据,以保证耦合模型的实时性。 总的来说,在已发表的文献中,很难找到控制系统中轴系振动的耦合模型。
本文针对推进系统的振荡问题,首先计算了扭转振动,并在传统的刚性轴模拟方法的基础上模拟了速度控制。 分别对扭转振动和速度控制两部分进行分析,以检查结果是否符合船级社规则。 然后,提出了一种结合变形轴扭转振动与速度控制系统的耦合仿真模型,这是以前从未研究过的。 将刚性变形轴系模型代入速度控制仿真模型,建立耦合模型。 耦合模型可以用来解释故障原因为故障问题。 这样的问题有时不是简单的部件设计问题,而不是诸如轴系,控制器等系统中所有部件之间的耦合问题。
-
轴系扭转振动
- 免费的扭转振动
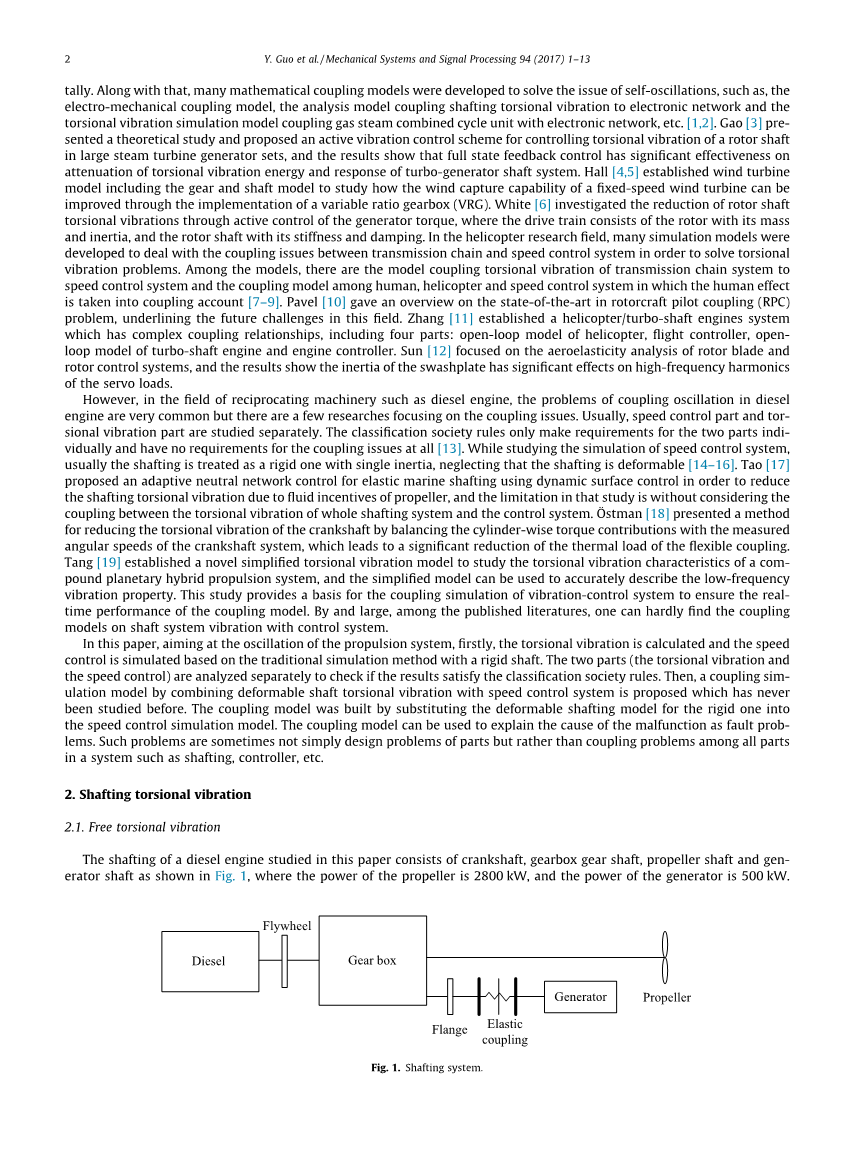
本文研究的柴油机的轴系由曲轴,齿轮箱齿轮轴,传动轴和发电机轴组成,如图所示图。1,其中螺旋桨的功率为2800千瓦,发电机的功率为500千瓦。
飞轮
柴油机 齿轮箱
螺旋桨
发电机
轮缘 弹性联轴器
图1.轴系。
根据保持振动特性不变的原则,通过将轴系简化为具有35个惯性和34个弹性轴部分的模型来创建集总参数模型,如图2,集中模型的输入参数见表1表格1。 简化模型的扭转振动特性将等同于真实的轴系。 稍后,对真实发动机的测试表明,简化是可以接受的。
飞轮
26
27
螺旋桨轴
25
1 2 3
减震器
4 5
6 7 8 9 10 11 12 13 14 15 16 17 18
28 29 30 31 32 33 34
35
气瓶
19 20 21 22 23 24
发电机
轴
图2.等效轴系。
表格1
用于计算扭转振动的输入参数。
|
没有。 |
时刻 |
扭转刚度 |
没有。 |
时刻 |
扭转刚度 |
|
惯性J1 |
惯性(kg-m2) 168.0 |
(MN-M /弧度) |
惯性J19 |
惯性(kg-m2) 16.00 |
(MN-M /弧度) |
|
刚度K1惯性J2刚性K2惯性J3 刚度K3 |
38.60 47.30 |
5.500 108.0 84.00 |
刚度K19惯性J20刚度K20惯性J21 刚度K21 |
2.280 21.60 |
9.880 10,000 1.024 |
|
惯性J4刚性K4惯性J5刚性K5惯性J6刚性K6惯性J7 刚度K7 |
47.30 47.30 47.30 47.30 |
84.00 84.00 84.00 84.00 |
惯性J22刚性K22惯性J23刚性K23惯性J24刚性K24惯性J25 刚度K25 |
7.200 13.60 274.7 95.57 |
1.024 23.08 5.500 10,000 |
|
惯性J8刚性K8惯性J9刚性K9惯性J10刚性K10惯性J11 刚度K11 |
47.30 47.30 47.30 47.30 |
84.00 84.00 84.00 116.0 |
惯性J26刚性K26惯性J27刚性K27惯性J28刚性K28惯性J29 刚度K29 |
17.40 0.7513 4.830 43.10 |
17.79 33.65 10,000 11.39 |
|
惯性J12刚性K12惯性J13刚性K13惯性J14刚性K14 惯性J15 |
13.80 617.3 21.00 30.00 |
101.0 10,000 0.576 |
惯性J30刚性K30惯性J31刚性K31惯性J32刚性K32 惯性J33 |
1.382 5.233 7.321 7.975 |
10,000 1.011 0.9379 |
|
刚性K15惯性J16刚性K16惯性J17刚性K17惯性J18刚性K18 |
66.50 10.50 50.65 |
0.576 10,000 10,000 10,000 |
刚度K33惯性J34刚度K34惯性J35 |
13.50 214.2 |
0.9588 0.9326 |
在等效轴系中显示图2,来自NO的惰性。 1到NO。 13代表柴油机曲轴和NO的惯性。 3到NO。 11代表柴油机的九个气缸。 螺旋桨轴简化为惯性和NO的轴部分。 28至NO。 35和第35惯性代表螺旋桨。 发电机轴简化为NO的惯性和轴段。 19至NO。 24和24惯量表示发电机的转子。 来自NO的分支惯性。 25至NO。 图27展示了传递其他载
全文共12474字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[12249],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

