英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
第五届材料加工和表征国际会议(ICMPC 2016)
基于Simulink的四分之一轿车模型平顺性和操纵稳定性的分析
Trupti P. Phalke *,Anirban C. Mitra
M.E.S. 印度浦那工程学院
摘要
汽车工业正在努力改进设计,为高速车辆提供好的平顺性。平顺性成为现代汽车发展的一个重要问题。四分之一车模型多年来一直被用来研究汽车动力学。本研究旨在研究车辆在平顺性和操纵稳定性方面的性能。采用二自由度系统四分之一车模型,对平顺性和操纵稳定性进行了动态响应分析。利用MATLAB 和SIMULINK对系统的动力学方程进行了求解,分析了系统的阻尼系数、刚度、悬挂质量和速度对平顺性和操纵稳定性的影响。
@2017年埃尔塞维尔有限公司出版
第五届国际材料加工大会会议委员会成员的遴选和同行评审定性(国际化学品管理方案理事会2016年)。
关键词:四分之一车模型,平顺性,操纵稳定性,MATLAB,SIMULINK
- 引子
据报告,全世界每年有100多万人丧生,约有5 000万人因道路事故而受非致命伤害[ 1 ]。汽车的行驶安全性和操纵能力主要由其悬架系统确定,该悬架系统在车辆和道路之间传递力[ 2、3]。受到与长时间就座相关的全身振动是引起驾驶员腰痛的重要风险因素。在过去的几十年中,车辆悬架系统和驾驶员座垫设计都引起了人们的极大兴趣,并致力于改进它们。通过悬架和座椅的减振不仅能提供乘坐舒适性,还能降低因驾驶而导致的LBP风险[ 1 ]。所有悬架系统的主要功能都是减少或消除传递到车身的道路激励。被动悬架系统包括带轮胎的车轮、车轮托架系统、弹簧和减震器元件、转向和制动器[ 4 ]。汽车被动悬架系统的动力学行为主要取决于弹簧(刚度ks )和阻尼器(阻尼cs )的选择。在设计悬架系统时,弹簧和阻尼器的选择,考虑了不同的方面。一方面,悬架应通过软弹簧和减震器设置来提供优异的乘坐舒适性,从而将底盘与路面引起的振动隔离开来。另一方面,车辆应由驾驶员控制以确保乘坐安全,这需要车辆和道路之间的刚性、良好阻尼的联接,特别是对于非静止驾驶机动,例如驾驶崎岖道路或转弯[ 4 ]。因此,关于舒适性和安全性的要求是相互矛盾的。平顺性的一个简单度量是垂直底盘加速度的均方根( rms )值。均方根值( RMS )应较低,以给车辆悬架带来舒适的印象。为了提供行驶安全性,轮胎必须能够在车辆和道路之间传递垂直力和侧向力,这只有在所谓的动态车轮载荷(动态力)有界,即车轮保持与道路接触的情况下才是可能的。这一要求也可以用均方根值的界来表述[ 2 ]。本工作的当前目标是开发一种适用于设计阶段的优化技术,以获得满足ISO 2631 - 1 : 1997标准性能的客车被动悬架的悬架参数 [ 5,6]。首先,建立了无驾驶员二自由度四分之一汽车被动悬架的数学模型。其次,通过对四分之一车型的模态分析,推导出以弹簧刚度( ks )、阻尼系数( cs )、悬挂质量( ms )和车速( v )为目标函数的平顺性( RC )和操纵稳定性( road holding )。
术语
RC 平顺性 RH 操纵稳定性
Ms 悬挂质量 Cs 悬架阻尼系数
Ks 悬架弹簧刚度 mu 非悬挂质量
Kt 轮胎弹簧刚度 RMS 均方根
- 数学建模
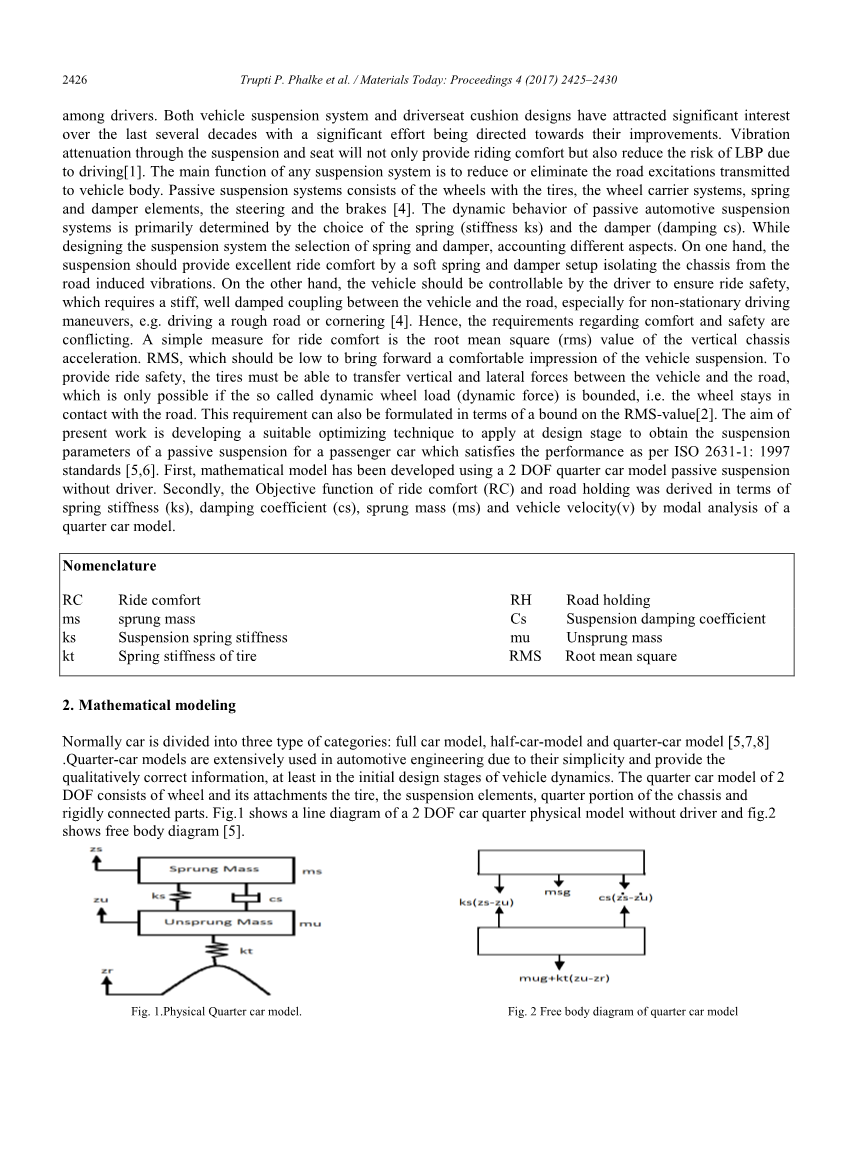
通常汽车分为三类:全车型、半车型和四分之一车型[ 5,7,8 ]。四分之一汽车模型由于其简单性而在汽车工程中被广泛使用,并且至少在车辆动力学的初始设计阶段提供定性正确的信息。二自由度四分之一汽车模型由车轮及其附件、轮胎、悬架元件、底盘四分之一部分和刚性连接部分组成。图1示出了不带驾驶员的2 DOF汽车四分之一物理模型的线图,图2示出了受力分析图[ 5 ]。
非悬挂质量
悬挂质量
图1 四分之一汽车物理模型
图2 四分之一汽车模型受力分析
在图中:
- 一个轮胎及其附件用质量(mu)、刚度( kt )表示。
- 汽车底盘的四分之一由悬挂质量( ms )、阻尼系数( cs )和刚度( ks )表示,cs和ks是悬架参数。
图2显示了两个集总质量系统的受力分析图。应用牛顿第二定律得到了系统的微分方程。系统的动态运动为: zs和zu。道路的不规则性由假定为正弦的动态运动zr定义。当然,不规则性是随机的。微分方程以如下标准形式编写:
(1)
(2)
方程( 1 )和( 2 )以图3所示的MATLAB SIMULINK中的数学模型的形式表示。
图3 四分之一车仿真模型
有不同类型的道路激励,即圆形、抛物线形、梯形。本文采用正弦路面激励。在Simulink中将由图4所示的等式( 3 )导出的正弦道路激励用作模型的输入,并且计算系统的平顺性、操纵稳定性和位移。具有不同车速v的保险杠宽度L。对于绝对时间帧t,表示当车轮正以距离d接近保险杠时的模拟时间。车轮上的保险杠激励的数学表达式如下,Banerjee [ 9 ] :
图4 保险杠高度为0.1m的道路曲线图
通过改变系统的输入参数刚度、阻尼器、悬挂质量和速度,分析了4种不同情况下对操纵稳定性和平顺性的影响。
情况I ]把悬挂质量( ms ) 300 kg、非悬挂质量( mu ) 45 kg、悬架刚度( ks ) 5700 N / m、轮胎刚度( kt )是悬架刚度( ks )的10倍、速度( v ) 40公里/小时[ 9 ],在500 N - s / m至8000N - s / m的范围内变化的阻尼系数作为输入参数[ 10 ]。图5展现了随着该输入参数变化后的影响。
情况II ]把悬挂质量( ms ) 300kg、非悬挂质量( mu ) 45kg、阻尼系数( cs ) 3500N - s / m、轮胎刚度( kt )是悬架刚度( ks )的10倍、速度( v ) 40公里/小时[ 10 ]。把在2.5 kN / m至12k N / m 范围内变化的悬架刚度( ks )作为输入参数[ 11 ]。图6展现了随着该输入参数变化后的影响。
情况III ]把非悬挂质量( mu ) 45 kg,阻尼系数( cs ) 3500N - s / m,悬架刚度( ks ) 10,000 n / m,速度( v ) 40公里/小时[ 11 ],在300 kg到500 kg范围内变化的悬挂质量( ms )作为输入参数[ 10,11 ]。图7展现了随着该输入参数变化后的影响。
情况IV ]把悬挂质量( ms ) 300 kg,非悬挂质量( mu ) 45 kg,阻尼系数( cs ) 3500N - s / m,悬架刚度( ks ) 10000 n / m [ 11 ],在10公里/小时至100公里/小时范围内变化的速度( v )作为输入参数[ 9,10,11 ]。图8展现了随着该输入参数变化后的影响。
图5 阻尼系数对操纵稳定性和平顺性的影响
图6 悬架刚度对操纵稳定性和平顺性的影响
图7 悬挂质量对操纵稳定性和平顺性的影响
图8 速度对操纵稳定性和平顺性的影响
3 .结果和讨论
在以悬挂质量为参数的被动悬架系统平顺性和操纵稳定性的分析中,刚度、阻尼和速度是其中一个参数。从图中可以看出,随着均方根加速度值的增加,平顺性降低。操纵稳定性是道路激励与轮胎位移( zu - Zr )之间的相对位移。当( zu - zr )值为负值时,表示轮胎与路面失去接触。平顺性与操纵稳定性成反比。
情况I ]图5展示出了通过增加阻尼系数和保持其它参数不变,阻尼对行驶平顺性和操纵稳定性的影响的曲线图。观察到加速度随阻尼均方根值的增大而减小。因此,乘坐舒适性继续降低。达到最大行驶平顺性值为8000 N - s / m。操纵稳定性先减小后增大,因为操纵稳定性与行驶平顺性成反比。在8000 N - s / m处可获得最大行驶平顺性。
情况II ]图6展示出了通过增加刚度值和保持其它参数恒定,刚度对行驶平顺性和操纵稳定性的影响的曲线图。结果表明,随着刚度值的增大,行驶平顺性先增大后减小,再增大。在7000 N - m处可获得最大行驶平顺性,在1500 N - m处可获得最大操纵稳定性。
情况III ]图7展示出了通过增加悬挂质量和保持其它参数恒定,悬挂质量对行驶平顺性和操纵稳定性的影响的曲线图。结果表明,随着悬挂质量的增加,行驶平顺性先减小后增大。到达370kg时,行驶平顺性有最小值,行驶平顺性更好,操纵稳定性与行驶平顺性成反比,因此在370kg时观察到最大操纵稳定性。
情况IV ]图8示出了通过增加速度和保持其它参数不变,速度对行驶平顺性和操纵稳定性的影响的曲线图。观察到均方根加速度值低于0.315 m / S2,在10至100 公里/小时的速度范围内具有相当的行驶平顺性。最初在低速时,行驶平顺性较低,但在45公里/小时后,它继续适度增加。低速时路面保持很高。20公里/小时时操纵稳定性最大,随后急剧减小,但45公里/小时后,增加速度对0.1m高度的保险杠没有任何影响。
4 .结论
在低阻尼系数时,获得良好行驶平顺性值。操纵稳定性随阻尼系数的变化而变化。对于软刚度行驶平顺性好,而对于硬刚度行驶平顺性差,在该情况下操纵稳定性变化与之相反。悬挂质量显示了行驶平顺性和道路保持的精确值。速度的影响取决于凸起的高度。保险杠的高度为0.1m,因此对于小速度而言表现出强烈的影响,而对于高速度而言,冲击的影响可以忽略不计。根据ISO 2631 - 1 - 1997,当均方根加速度小于0.315 m / S2时,车内乘客不在不舒适区[12 ]。
表1 使用ISO标准对工作进行验证
|
不同条件 |
均方根加速度m / S2 |
备注 |
|
情况I |
0.153 |
舒适 |
|
情况II |
0.206 |
舒适 |
|
情况III |
0.22 |
舒适 |
|
情况IV |
0.17 |
舒适 |
因此可以根据表1来判断设计是否在舒适区。
5.未来的范围
该方法可以用梯形和方形输入代替正弦输入,并对阻尼器、弹簧、悬挂质量和速度等参数进行响应分析。通过改变凸块高度,可以对模型进行分析。此外,对于半主动悬架和主动悬架系统,本文的全套工作可以进行推广。
参考文献
[1] WHO. Global status report on road safety - Time for action. Technical report, World Health Organization, Geneva, 2009.
[2]M. Mitschke and H. Wallentowitz. Dynamik der Kraftfahrzeuge. Springer, Berlin,2004.
[3]J. Reimpell and H. Stoll. Fahrwerktechnik: Stoszlig;- und Schwingungsd ampfer. Vogel Buchverlag, Wuml;urzburg, 1989.
[4]O. Gu ndogdu, International journal of Industrial Ergonomics 37, (2007) 327-332
[5]Anirban C Mitra, Gourav J Desai, Saaish R Patwardhan, Parag H Shirke, Waseem MH Kurne, Nilotpal Benerjee, Discovery, 2015, 29(112),
127-137.
[6]Anirban C. Mitra, Tanushri Son
全文共6026字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11959],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。
您可能感兴趣的文章
- 拟人手臂的轨迹规划与轨迹跟踪控制外文翻译资料
- 新型磁性辅助内窥镜系统在上消化道检查中应用的可行性 和安全性外文翻译资料
- 基于FPGA可编程逻辑器件的复合视频图像处理外文翻译资料
- 从被测的高频域原始信号中提取巴克豪森噪声外文翻译资料
- 重型机床z轴热误差混合建模方法外文翻译资料
- 一个红外浊度传感器:设计与应用外文翻译资料
- 用于控制食物烹饪过程的电子系统.外文翻译资料
- 关于液体介质中电磁流量计的设计和理论上存在的问题。第二部分:关于带电粒子产生的 噪声理论外文翻译资料
- 基于LabVIEW和Matlab的小波变换对非平稳信号的分析仿真外文翻译资料
- 应用于腹腔镜手术的新型膜式加热加湿器 的开发外文翻译资料

