英语原文共 46 页,剩余内容已隐藏,支付完成后下载完整资料
振动系统建模
- 简介:
在本章中,描述了构成振动系统模型的元件,并举例说明了这些元件的构造模型。一般来说,有三种组成振动系统的元素:1.惯性元件2。刚度元件3.耗散元件。除了这些元件外,还必须考虑外部施加的力和力矩以及来自规定的初始位移和初始速度的外部干扰。
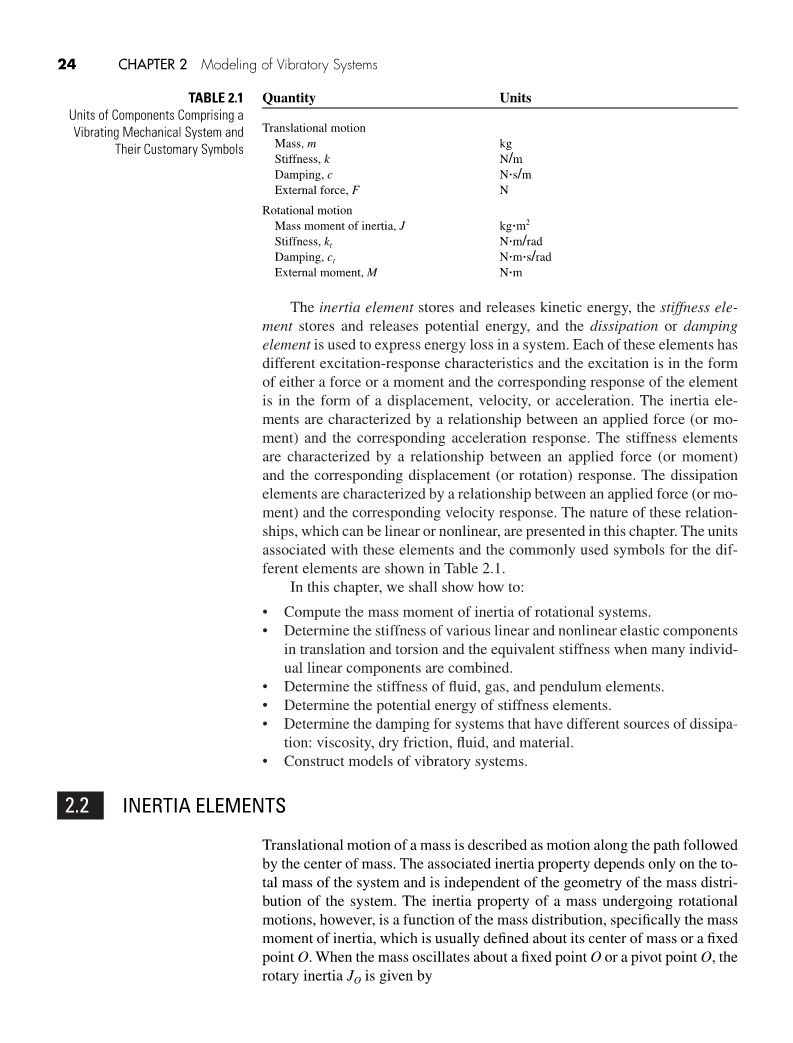
表格2.1
名称 单位
横向运动
质量,m kg
刚性,k N/m
阻尼,c N*S/M
外力,F N
旋转运动
惯性矩 kg*m^2
刚性,k kg
阻尼,c N*S/M
外部力矩,M N
惯性元件存储和释放动能,刚性元件存储和释放势能,耗散或阻尼元件用于表示系统中的能量损失。每一个元件具有不同的弹簧 - 响应特性,并且弹簧以力或力矩的形式出现,并且元件的相应响应以位移,速度或加速度的形式。惯性元件的特征在于施加的力(或力矩)与相应的加速度响应之间的关系。刚度元件的特征在于施加的力(或力矩)与相应的位移(或旋转)响应之间的关系。耗散元件的特征在于施加的力(或力矩)与相应的速度响应之间的关系。这些关系的性质可以是线性的或非线性的,它们将在本章中给出。表2.1列出了与这些元素相关的单位和不同元素的常用符号。在本章中,我们将演示如何:
bull;计算旋转系统的质量惯性矩。
bull;确定平移和扭转时各种线性和非线性弹性分量的刚度以及组合许多单独线性分量时的等效刚度。
bull;确定流体,气体和摆锤元件的刚度。
bull;确定刚度元素的势能。
bull;确定具有不同耗散源的系统的阻尼:粘度,干摩擦,流体和材料。
bull;构建振动系统模型。
- 惯性元件
质量的平移运动被描述为沿着质心所遵循的路径的运动。相关的惯性属性仅取决于系统的总质量,并且与系统的质量分布的几何形状无关。然而,经历旋转运动的质量的惯性特性是质量分布的函数,特别是质量惯性矩,其通常定义为关于其质心或固定点O的质量惯性矩。 当质量围绕固定点O或枢轴点O摆动时,旋转惯性JO由下式给出
(2.1)
其中m是元件的质量,JG是围绕质心的质量惯性矩,d是从重心到O点的距离。 2.1中,质量惯性矩JG和JO都是相对于垂直于质量平面的轴定义的。 关于通过质量中心G的轴的质量惯性矩与通过另一个点O的平行轴之间的这种关系遵循平行轴定理。 一些常见形状的质量惯性矩在图2.2中给出
细长的条
圆盘
球体
圆柱体
2.2
接下来将研究惯性属性如何与力和力矩相关以及这些属性如何影响系统动能的问题。 在图2.1中,示出了在X-Y平面中以大小的速度平移的质量m。 图中还显示了速度矢量的方向,以及作用在该质量上的力的方向。 在第一章中阐述线性动量和角动量的原理时,假定了惯性特性和力与力矩之间的某些关系。 这些关系在这里重新审视。 根据方程式给出的线性动量原理, (1.11),控制质量运动的方程为
图2.1
此时如果m和i独立于时间,可以简化为
(2.2)
在考察方程 (2.2),很明显,对于平移运动,惯性属性m是力与加速度的比值。 质量单位可以通过表格2.1得到。我们也可以从方程2.2中明显的看到这一点。根据(1.22),质量m的动能由下式给出:
(2.3)
然后我们使用了恒等式。 根据方程式给出的定义。 (2.3)式中,很明显平动运动的动能与质量成线性比例关系,而且动能与速度大小的二次方成正比。 为了用不同的方式满足方程式(2.3),让我们考虑第1.2.4节讨论的工作能量定理。 我们假设图2.1中所示的质量从初始静止状态(时间上的速度为零)转换到时间tf的最终状态。 然后,从方程 (1.26)在力Fi的作用下完成的功W由下式给出:
(2.4)
在这里我们使用关系式.因此可得到动量:
(2.5)
该式等价于方程2.3
对于只在角平面内以角速度旋转的刚体,可以从1.2.3节中讨论的角动量原理表明:
(2.6)
其中沿着与运动平面正交的方向移动到焦点固定点O的中心(如图2.2所示)
a b
图2.2
(a)其周边的一点处铰接的均匀盘和.(b)一端铰接的均匀块的棒。
从等式(2.6)可以看出,对于旋转运动,惯性J是角加速度与角加速度之比。同时,可以验证表2.1中J的单位与Eq。一致。 (2.6)。这种惯性性质也被称为旋转惯性。 此外,为了确定惯性J如何影响动能,我们使用式(1.25)来表示体系的动能。
(2.7)
因此,旋转运动的动能仅与惯性特性J即惯性矩成正比。 此外,动能与角速度大小的二次方成正比。 在讨论迄今为止所提供的振动系统的惯性特性时,假定惯性特性与运动的位移无关。 这个假设对于所有的物理系统都是无效的。 对于例2.2中讨论的滑块机构,惯性属性是角位移的函数。 其他例子也可以在文献中找到。
3:刚度元件
3.1简介
刚度元素由不同的材料制成,并具有许多不同的形状。根据要求选择元素的类型;例如,尽量减少从机械到支撑结构的振动传递,将建筑物与地震隔离,或从受到冲击的系统吸收能量。图2.4中显示了一些具有代表性的刚性元件类型,以及它们的典型应用。刚度元素存储和释放系统的势能。为了检查势能是如何去音响奈德,让我们考虑在图2.5所示的图示,其中一个弹簧在端O上固定成本,而在另一端,的幅度F A力沿的单位矢量的方向定向学家在这个力的作用下,让元素从初始或未拉伸的长度Lo延伸到长度Lo? x沿着j的方向。在经历这种变形时,F和x之间的关系可以是随后讨论的线性或非线性的。
图2.4
(a)使用圆柱形橡胶支座进行横向运动的建筑物或公路基地隔离;
(b)钢丝绳隔离器以隔离机械的垂直运动;
(c)用于悬挂系统的空气弹簧,以隔离垂直运动;
(d)用于隔离垂直运动的典型钢制螺旋弹簧;
(e)用于烟囱调谐质量阻尼器的钢索弹簧,以抑制侧向运动。
来源:福尔摩斯咨询集团; 钢丝绳目录,页码。 6,Enidine Incorporated,2006; http://www.enidine.com/Airsprings.html 2006 Enidine Incorporated; C系列振动隔离器的图片http://www.isolationtech.com/sercw.htm; 调谐质量阻尼器图http://www.iesysinc.com/ Tuned_Mass_Dampers.php 2001-2002工业环境系统公司
图2.5
(a)作用于其上的刚度元件和(b)其自由体图。
如果Fs代表在刚性元件内作用的内力,如图2.5b中的自由体图所示,那么在下部弹簧部分,这个力等于外力F,并与之相反; 由下式给出:
由于力Fs试图将刚度元件恢复到其未变形的配置,所以它被称为恢复力。随着刚度元件变形,能量存储在该元件中,并且当刚度元件未变形时,能量被释放。 势能V被定义为将刚度元件从变形位置移动到未变形位置所做的工作; 也就是说,需要将元素变形为原始形状。 对于图2.5所示的元素,这是由下式给出:
在这里我们已经使用了等式j * j = 1和Fs = -Fj。 像动能T一样,势能V是一个标量值函数。 弹簧经受的变形与外部施加的力之间的关系可以是线性的,如2.3.2节所述,或者非线性,如2.3.3节所述。 第2.3.2节也介绍了等效弹簧元件的概念。
势能V的一般定义采取这种形式
力Fs是一种保守的力量。恒力所做的工作与最初和最终位置之间的路径无关。
3.2线性弹簧
传递弹簧
如图2.6a所示,如果力Fis作用于线性弹簧,则该力产生一个变形x
(2.9)
在这里系数k称为弹簧常数,力与位移之间存在线性关系。 根据方程式 (2.8)和(2.9),储存在弹簧中的势能V由下式给出
(2.10)
因此,对于线性弹簧,相关联的势能与弹簧刚度k成线性比例,并且与位移量的第二功率成比例。
扭转弹簧
如果考虑线性扭转弹簧,并且在弹簧的一端施加力矩t而弹簧的另一端保持固定,则
(2.11)
其中Kt是弹簧常数,u是弹簧的变形。 此时弹簧存储的潜在能量是:
(2.12)
3.3 线性弹簧的组合
现在考虑线性弹簧元件的不同组合,并确定这些组合的等效刚度。 首先考虑图2.6b和2.6c中所示的平移弹簧的组合,然后考虑图2.7a和图2.7b中所示的扭转弹簧的组合。 如图2.6b所示,如果有两根平行的弹簧平行,并且力实数保持平行于其原始位置的杆,则两根弹簧的位移相等,因此总力为:
其中Fj(x)是当弹簧系数kj,j分别等于1和2的情况下的合力而ke是两个弹簧平行的等效弹簧常数,其中Ke为K1与K2之合。
当有两个弹簧串联时,如图2.6c所示,每个弹簧上的力是相同的,总位移是:
等效弹簧常数ke是:
- (b)
(c)
图2.6 图2.7
一般来说,对于平行的N个弹簧,我们有:
(2.17)
对于N系列的弹簧,我们有:
(2.18)
图2.6b所示的弹簧组合的势能由下式给出:
其中V1(x)是与刚度k1弹簧相关的势能,V2(x)是与刚度k2弹簧相关的势能。 利用等式(2.10)来确定V1(x)和V2(x),我们发现
对于图2.6c所示的弹簧组合,该系统的势能由下式给出:
在这里方程(2.10)已被使用。 如第3.6节和第7.2节所讨论的,根据系统的势能构建的表达式可用于确定系统的运动方程。 对于串联和并联组合的两个扭转弹簧,我们参考图2.7。 从图2.7a可以看出,每个弹簧的旋转角度是相同的
(2.19)
其中tj是在春季产生的瞬间ktj,j = 1,2,而kte是由等式给出的扭转刚度,Kte为Kt1和Kt2之合。
对于串联的扭力弹簧,如图2.7b所示,每个弹簧的扭矩相同,但旋转不相等。 从而F=Kte
等效刚度kte是
图2.7a所示扭转弹簧组合的势能由下式给出
我们使用方程(2.12)。 对于图2.7b所示的扭转弹簧组合,系统势能由下式给出
振动模型中常见结构元件的等效弹簧常数
为了确定许多弹性结构元件的弹簧常数,可以利用力和位移之间的已知关系。表2.3给出了几种这样的弹簧常数,这些常数已经被确定用于不同的几何形状和加载条件。出于建模目的,结构元件的惯性如表2.3中的例4至6的梁通常被忽略。在第9章中,显示了在什么条件下做出这样的假设是合理的。由于通过分析可能无法获得给定系统的弹簧常数,因此通常必须通过实验确定该常数。作为一个典型的例子,让我们回到图2.4a,考虑这个系统的弹簧常数的实验确定。载荷F逐渐增加到一个选定的值,并且对于每个F值记录从元件的未拉伸位置产生的偏差x。这些数据绘制在图2.8中,其中空心正方形用于表示实验获得的数据的值。然后,假设刚度元素是线性的,则完成曲线拟合以估计公式中的未知参数k。 (2.9)。弹簧常数的最终值也显示在图2.8中。请注意,刚度常数k是一个静态概念,因此,静态负载足以确定此参数。除方程式之外的力 - 位移关系。 (2.9)也可用于确定表征刚度元素的参数,例如k。第2.3.3节讨论了非线性弹簧参数的确定。在更广泛的范围内,用于确定振动系统单元参数(如k)的程序属于系统标识或参数标识区域;在实验模态分析中,对振动系统的参数进行了识别和估计[4]。在实验模态分析中,动
全文共7678字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11899],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

