英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于IEC 61499的水果包装机控制及半实物仿真
摘要
本文介绍了从标准集中控制向果汁包装机的模块化,分布式控制的转变。 除了使用IEC 61499开发的控制外,该工厂的仿真模型也是并行开发的。两者都被部署到硬件上,以演示使用单个底层架构的无缝测试。仿真模型的可视化被创建于查看现场模拟。在实施过程中比较了IEC 61499和传统技术之间的差异,解决了将常用传统设计元素应用于IEC 61499标准的困难。
关键字:IEC 61499;模块化控制;转变
第1章 绪论
随着自动化系统变得越来越复杂,设计和维护也更加困难。工业自动化趋势也在传统集中范式逐渐向分布式智能转变。过去非常流行的可编程逻辑控制器(PLCs)仍然非常普遍,但对于新一代系统的开发变得很麻烦。
本文的目的是阐述基于PLC的水果包装机在IEC中的61499应用,同时说明反复设计的原因是由于范例的改变。有一种特定的机器应用于柔性包装机。这个机器是由许多机械物体组成,它最初是使用单一的PLC控制。这个项目概述了基于IEC 61499模块化控制体系结构的设计。此外,它集成了硬件在环(HIL)测试,可视化仿真与开发。本来模型视图控制器(MVC)设计模式应用于多个硬件控制器应该在规定时间完成,然而,到工厂的实际部署超出了原本时间表。
第2章 自动化和IEC 61499介绍
2.1 IEC 61499
EC 61499的一个主要优点是它的面向对象,它可以将功能封装为函数性质,它也可以根据需要实例化和重新使用块(FBS)。由于缺少全局变量,开发人员需要使用显式通信设计应用程序机制.
从传统应用到IEC 61499的转变是一些作品的焦点。[1]基于IEC 61499功能模块的IEC 61131-3 PLC应用。[2]讲解一个例子,研究从现有PLC应用程序到网络运行分布式控制应用程序的转变。 转变对于使用以前的控制应用很有用。但是,事实上,转变的应用程序仍然基于集中式设计范例,它不利用IEC 61499的面向对象特性。
IEC 61499标准也提供了针对模型驱动设计方法架构的强有力支持。许多工业自动化系统可以被分割为明确定义的领域,无论这些领域是物理的组件或软件概念或IEC 61499,都可用FB设计抽象对它们进行建模。
由于其与MVC设计模式的协同作用,IEC 61499开发软件NxtStudio被用于这项工作。 它允许在同一个IDE中集成闭环仿真和可视化。 此外,FB系统可以在应用级开发,然后部署到一系列硬件配置。 高层次的分布实现相对简单。[3]而不需要处理硬件之间的通信。
2.2 工业自动化仿真
能够在切割任何钢材之前模拟工厂的动态特性,可以在工厂调试之前节省开发人员的时间和资金。此外,工厂建成后,工厂的改变将导致控制应用的变化[4]与工厂调试并行设计控制,可以缩短上市时间。
MVC设计模式结合了一个模型组件,在工业仿真中可以作为工厂的精确模拟。 仿真的集成既可以直接在运行环境[5]中,也可以在独立的专用仿真框架(如MATLAB [6]或LabView)中进行。 使用外部仿真框架可能会提供大量预先存在的仿真模型。 在[7]中完成了从MATLAB Simulink模型到IEC 61499 FB的转换,这允许使用IEC 61499完成控制应用程序,以访问大范围的仿真模型。
第3章 柔性包装机介绍
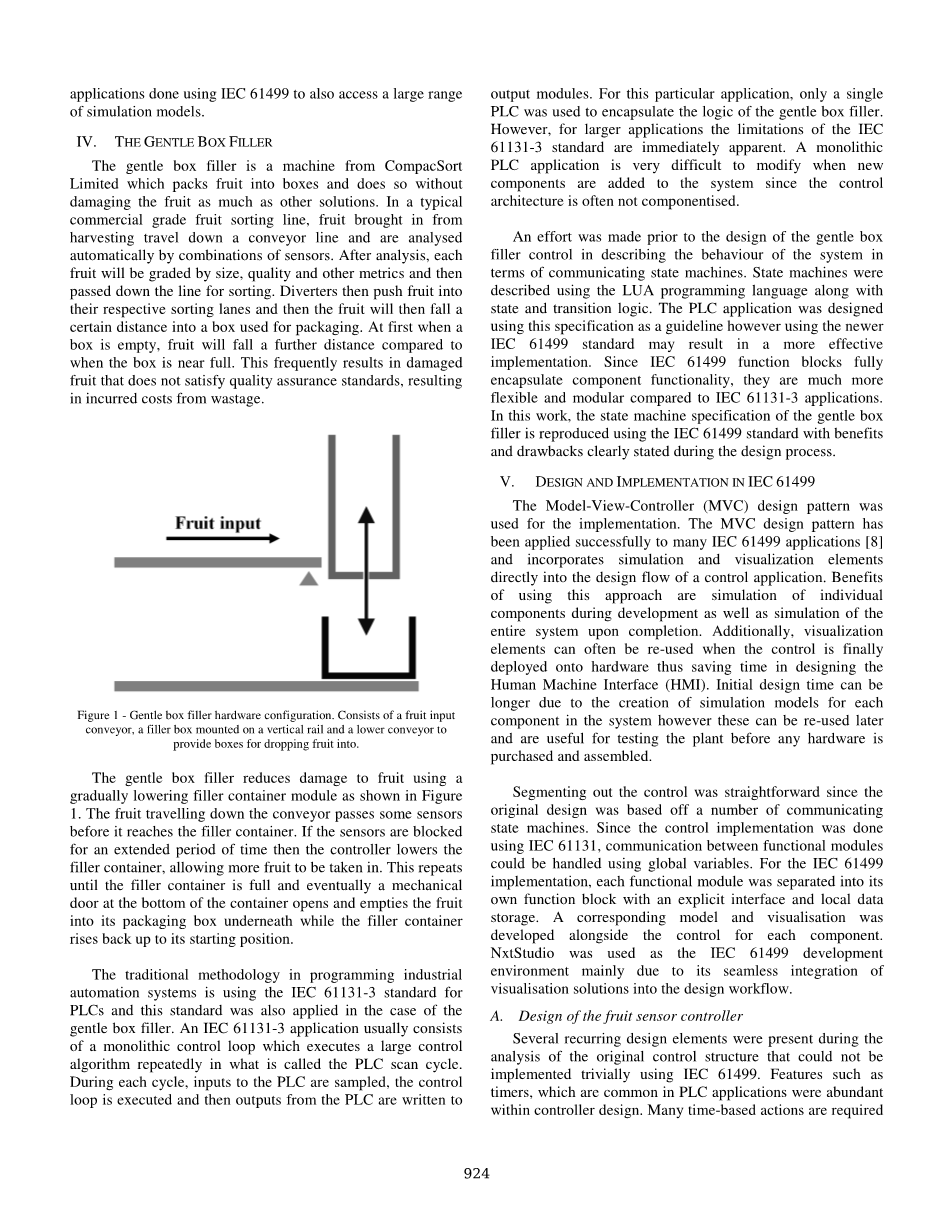
温和的盒子填充物是CompacSort Limited的一种机器,它将水果包装到盒子中,并且不会像其他解决方案那样损坏水果。 在一个典型的商业级水果分拣线中,水果从收割机运输到输送线,并通过传感器组合自动分析。 经过分析,每个水果将按照尺寸,质量和其他指标进行分级,然后通过分类进行分类。 分流者然后将水果推入各自的分类通道,然后水果将落入用于包装的盒子中一定距离。 起初,当一个盒子是空的时候,与盒子接近满的时候相比,水果将落下更远的距离。 这经常导致损坏的水果不符合质量保证标准,从而导致浪费造成的成本。
如图1所示,使用逐渐降低的灌装容器模块,温和的箱式灌装机可减少对水果的损害。沿着传送带行进的水果在到达灌装容器之前通过一些传感器。 如果传感器长时间堵塞,控制器会降低灌装容器的数量,从而允许更多的水果被灌入。这一直重复,直到灌装容器装满,并最终在容器底部的机械门打开并清空 水果放入其下面的包装盒中,而填充物容器升回到其起始位置。
工业自动化系统编程中的传统方法是使用PLC的IEC 61131-3标准,此标准也适用于温和的箱式填料。 IEC 61131-3应用通常由一个单片控制环组成,它在所谓的PLC扫描周期内重复执行一个大型控制算法。 在每个周期中,对PLC的输入进行采样,执行控制回路,然后将来自PLC的输出写入输出模块。 对于这个特定的应用,只有一个PLC被用来封装温和的盒式填充器的逻辑。 但是,对于较大的应用,IEC 61131-3标准的局限性立即显现出来。 由于控制体系结构通常不被分成组件,因此在将新组件添加到系统中时,单片PLC应用程序很难修改。
在描述系统在通信状态机方面的行为之前,设计了温和的盒子填充控制器之前已经做出了努力。 状态机使用LUA编程语言以及状态和转换逻辑进行描述。 PLC应用程序是使用此规范作为指导而设计的,但使用较新的IEC 61499标准可能会导致更有效的实施。 由于IEC 61499功能块完全封装了组件功能,与IEC 61131-3应用相比,它们更加灵活和模块化。 在这项工作中,使用IEC 61499标准复制柔性盒式填充器的状态机规格,并在设计过程中明确指出了优点和缺点。
第4章 IEC 61499的设计和实现
模型 - 视图 - 控制器(MVC)设计模式用于实现。 MVC设计模式已成功应用于许多IEC 61499应用[8],并将模拟和可视化元素直接集成到控制应用的设计流程中。 使用这种方法的好处是在开发过程中仿真单个组件,并在完成时模拟整个系统。 另外,当控制器最终部署到硬件上时,通常可以重新使用可视化元素,从而节省设计人机界面(HMI)的时间。 由于为系统中的每个组件创建仿真模型,初始设计时间可能会更长,但是这些仿真模型可以在以后重新使用,并且在购买和组装任何硬件之前测试工厂时非常有用。
由于原始设计基于许多通信状态机,因此细分控制很简单。 由于控制实现是使用IEC 61131完成的,因此可以使用全局变量来处理功能模块之间的通信。 对于IEC 61499实现,每个功能模块都使用明确的接口和本地数据存储分隔成自己的功能块。 相应的模型和可视化与每个组件的控件一起开发.NistStudio被用作IEC 61499开发环境,主要是因为它将可视化解决方案无缝集成到设计工作流程中。
4.1水果传感器控制器的设计
在原始控制结构的分析过程中出现了一些反复出现的设计元素,这些元素无法使用IEC 61499轻易实现。在PLC应用中常见的定时器等功能在控制器设计中非常丰富。 控制器设计需要许多基于时间的动作,例如等待机械组件移动,缓存传感器值或延迟系统启动。 在这些情况下,开发标准为计时器的实施提供了便利,这一点至关重要。
水果传感器控制器是第一个构建的,其IEC 61499 FB的接口如图2所示。输入包括两个布尔值,每个物理传感器一个。 输出结果包括一个GotFruit通知程序布尔值,一旦检测到水果堵塞,该布尔值即被设置。 在PLC实现中,这个GotFruit变量被建模为全局变量,因此应用程序中的每个控制器都可以读取其状态。 但是,在这种情况下,它作为FB的接口处的显式输出变量定义存在,并且任何取决于此变量的FB都有相应的输入。 这些输入和输出数据变量中的每一个都与单个事件相关联,在这种情况下,这些事件是REQ和CHG。
水果传感器控制组件也是定时器使用的一个简单示例,图3中显示了状态机。状态机在等待状态下初始化,一旦检测到水果,它启动一个定时器,然后等待该定时器。 如果传感器在计时器到期之前关闭,它将转回原始等待状态。 控制器要求水果传感器在确认堵塞水果之前长时间打开。 发生这种情况时,Has定时器转换将使状态机进入获得果实状态并确认检测。
这种在状态算法内启动定时器并等待定时器的模式在IEC 61499中不易再现,而是创建了单独的E_DELAY功能块来表示定时器,如图4所示。
IEC 61499 FB内ECC的相应变化如图5所示。一旦检测到水果,通过使用FB的输出事件启动水果定时器并传递给E_DELAY FB。 一旦过期,就会进行ECC转换以确认水果检测。 此外,水果检测与事件同步,因此基于输入数据的每次转换都伴随着事件检查。
4.2控制器的组成
对于每个控制器,仅使用单个输入事件和单个输出事件来分别表示REQ和CHG事件的数据变化。 完整控制器的组成是通过对具有密切相关功能的组件进行分组来逐步完成的。 例如,物理填充头容器需要电机沿垂直方向移动,以及控制器来监控线性编码器。 将它们合并到一个用于整个填充头容器的单个控制器中只需将每个基本控制器FB放置在具有单个REQinput事件和单个CHG输出事件的复合FB中。
4.3水果传感器模型的设计
这项工作不仅再现了原始温和盒装填器的控制器功能,而且还介绍了用于测试和可视化的MVC概念。 每个组件的模型都是在每个控制器功能块旁边设计的,以模拟相应组件的行为。 用于模拟水果传感器的FB如图6所示。
传感器使用单个输入进行初始化,该输入是传感器放置在传送带上的位置。 在完整的系统配置中,传感器型号将连接到初始化链的下游,与其所在的传送带相比。 单个时钟(CLK)事件更新FB的每个其他输入,并且时钟在仿真中保持时间概念是必需的。 在输入方面,有两个数组代表输送机上水果的位置和每个水果的大小。 单个输出数据布尔与CHG输出事件关联,CHG输出事件表示从工厂到控制器的I / O。 只要输出布尔值发生变化,CHG事件就会更新,并导致事件驱动模型和控制器设计放置在闭环中。 当控制器链接到物理设备时,这种事件驱动设计也会被复制,如后面介绍的I / O连接FB所示。
水果传感器模型的ECC如图7所示。 传感器简单地在感测和未感测状态之间交替,以及驱动对输出感测信号进行更新的时钟信号。 更新算法不会在输出中产生任何变化,当发生变化时,只会输出一个CHG事件,然后ECC将转换到相反的状态。
当然,与其他一些模型相比,水果传感器模型是一个相对平凡的模型,但是这种实现方式详细说明了使用IEC 61499不仅是控制设计的语言,而且也用于建模的可能性。 在这项工作中,每个模型都是手工创建的,[7]涵盖了从MATLAB Simulink模型到IEC 61499 FB模型的转换以及数据和事件流。 MATLAB Simulink可为各种机械和电气组件提供极好的仿真模型来源。
4.4故障处理
原始实现中的一个细节在转换到IEC 61499时没有被忠实地转载,这是错误处理。 图8显示了其中的一个例子,图8描绘了水果传送到达灌装容器的蓄水池输送机的状态机。 状态机有它的标准行为,但是有一个故障处理状态可以从任何状态转换到状态。 这种故障状态可能可以通过IEC 61499 [9]中的层级ECC来实现,但是NxtStudio没有这个特性,并且在这项工作中忽略了故障处理。
4.5 可视化
除了允许模型和控制逻辑外,NxtStudio还允许集成与每个模块化组件相连的可视化元素。 图9显示了箱式输送机模型的示例组件可视化。一些可视元素可以放置在屏幕上,然后通过输入和输出链接到相应的可视化FB。 这些输入和输出可以用来操纵可视化中元素的行为。
箱式输送机的相应可视化FB如图10所示。它需要输入描述箱式输送机型号的当前状态,例如箱子的位置和箱子里有多少个水果。 然后可以将该可视化FB与相应的仿真模型配对,从而无论何时在系统配置中实例化仿真模型时,可视化也将以最小的努力呈现。
第5章 部署和测试
使用IEC 61499,可以在将系统组成大型复合FB之前分别对系统中的每个组件进行测试。 对每个组件的控制进行测试,然后将其组合为一个复合FB,其内部如图11所示。由于每个控制器都由单个事件输入驱动,以表示对整个控制器的外部I / O分量的更改,因此只需将输入事件 每个子控制器上的相应事件。 同样,每个子控制器的输出事件都会合并为一个输出更改事件。
一旦仿真模型和控制器库完成,这些就被组成一个完整的系统配置。 尽管对实际工厂的全面部署超出了本工作的时间表,但在本地PC上进行了测试以及硬件部署。
5.1 在本地PC上模拟
最初的测试是将系统配置部署到NxtStudio提供的软件PLC上。 图12显示了控制器FB位于右上角的系统配置部分的布局。
在部署到软件PLC后,HMI可以通过NxtStudio启动,并且由每个模型和控制器组件的可视化元素组成。 完整的人机界面如图13所示。由于模拟的特性,例如水果发电机来代替从上游源到达系统的实际水果,物理设备中不存在的某些元素存在于HMI上。
基于图12中为模型指定的参数测试系统的性能与预期相同。但是,为了更好地表明真实世界的性能,需要进行硬件测试。
5.2 在多个PLC上进行仿真
下一阶段的模拟涉及将控制应用程序部署到单个PLC以及将模型应用程序分离到PLC。 使用NxtStudio,这可以通过单个应用程序来实现,其中控制器和模型FB映射到单独的控制器。 在此设置中,I / O直接连接到模拟工厂操作。 两台Wago 750-860 PLC用于部署,然而Beckhoff CX1010 PLC也进行了测试。
尽管时序特性可能不同
全文共7818字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11678],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

