英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
具有四杆机构和顺应连杆机构的水下机械手的设计,建模和优化
Sangrok Jin ,Jihoon Kim,Jangho Bae,TaeWon Seo,and Jongwon Kim
1首尔大学机械与航空航天工程学院,首尔151-742,韩国
2韩国岭南大学机械工程学院,韩国庆山712-749
(手稿2015年6月17日收到; 2015年11月20日修订; 2016年2月1日接受)
摘要
水下机器人对于机器人在水中执行特定操作非常重要。传统的机器人手臂操纵器已被提出用于各种操作,但不适合重复运动来收集某些东西。本文介绍了一种新的水下机器人设计,用于收集诸如海底海星等物体。该操纵器由一个四杆连杆机构组成,可实现沿着回路的重复运动以及符合规定的连杆机构,从而提高采集工作的效率。执行运动和准静态分析来计算环路和致动点处的反作用力。在分析的基础上,进行优化设计以最大化工作距离,高度差和反应时刻被视为约束。组装原型以测试操纵器的性能,并将经验循环路径与仿真结果进行比较。
关键词:水下机器人; 四连杆机构; 合规机制; 优化; 准静态分析
1.介绍
最近,海星已成为贝类养殖场的重要问题。消除海星的一种方法是潜入水下并手动捕获,但效率不高,并且水下环境对潜水员来说是危险的。水下机器人正被视为一种解决方案。 我们在以前的工作中设计了一个带有倾斜推进器的悬停式水下机器人平台[1]。 该平台是通过上面和平台下的不同应用程序模块为各种应用程序设计的。
水下机器人平台已广泛应用于环境监测[2-4],核电站管道检测[5],从步行到游泳[6]和学术实验[7]的过渡应用。 操纵器是执行特定操作的水下机器人的重要组成部分。 Ishitsuka和Ishii开发了一种带磁耦合的2自由度(DOF)操纵器[8]。Yeorger等人 开发了一个三自由度主动兼容机械手与主动兼容机械手[9]。Zhang等人 研究了具有关节限制的机械手的运动规划[10],以及Kawano等人 研究了水下车辆操纵系统(UVMS)的主 - 从控制系统用一个2自由度机械手[11]。
最近提出了一种受章鱼臂灵感启动的机械手[12]。这些作品中的大多数使用2或3自由度开放链机制。传统的机器人手臂操纵器不适合我们研究目标的快速重复操作。例如,像水下采矿机器人[13],用于所需任务的特定机器人将会更有效率。贝类养殖场下有害海星大多聚集在一起。一次一次清扫许多海星的机制比一个一个拾取海星的机器人手臂机械手好得多。清扫动作不需要太高的精确度和准确性,而且快于逐个拾取它们。
四连杆机构对于快速重复的循环运动是有效的。四杆机构将简单的旋转运动转换为沿着特定轨迹的重复的循环运动,并且其广泛用于使用单个电机实现期望的运动。 机构的连接长度是影响运动轨迹和致动转矩的敏感因素。因此,四连杆机构设计需要优化。
四杆机构已经针对各种应用进行了研究。Hamon和Aoustin为平面双足机器人设计了四杆膝盖[14]。Nariman-Zadeh等人 应用四杆机制来追踪两条不同的轨迹[15]。 Endo et al。 将平行四连杆机构应用于重量补偿机构[16]。这些研究也涉及通过许多不同的方法进行优化工作,如SQP方法[14],遗传算法[15]和具有自适应局部搜索的混合多目标遗传算法[17]。 虽然以前有许多关于四连杆机构应用的研究,但它们在实例中受到限制,并且很难将这些方法广泛用于其他研究。
在这项研究中,一个新的四连杆机器人与一个兼容的连接被设计用于捕获海星。扫描运动的轨迹模型是通过考虑符合方向的工具链接来推导的。机械手末端的轨迹由连杆的运动学配置和柔性接头的刚度决定。通过准静态分析研究了阻力和转速对轨迹的影响。进行设计优化以获得期望的路径和反作用力,并且制作原型以演示性能。
本文的其余部分安排如下。我们首先在第二节中介绍了新型海星捕获机械手模型的机器人平台。2.还介绍了工作场景。3涵盖了用于模拟水下机器人运动的运动学模型和准静态分析模型。4涉及优化问题,包括成本函数,控制变量和约束条件。 最后,在第二部分。 我们通过实验验证了优化操纵器的性能。
2.机械手设计
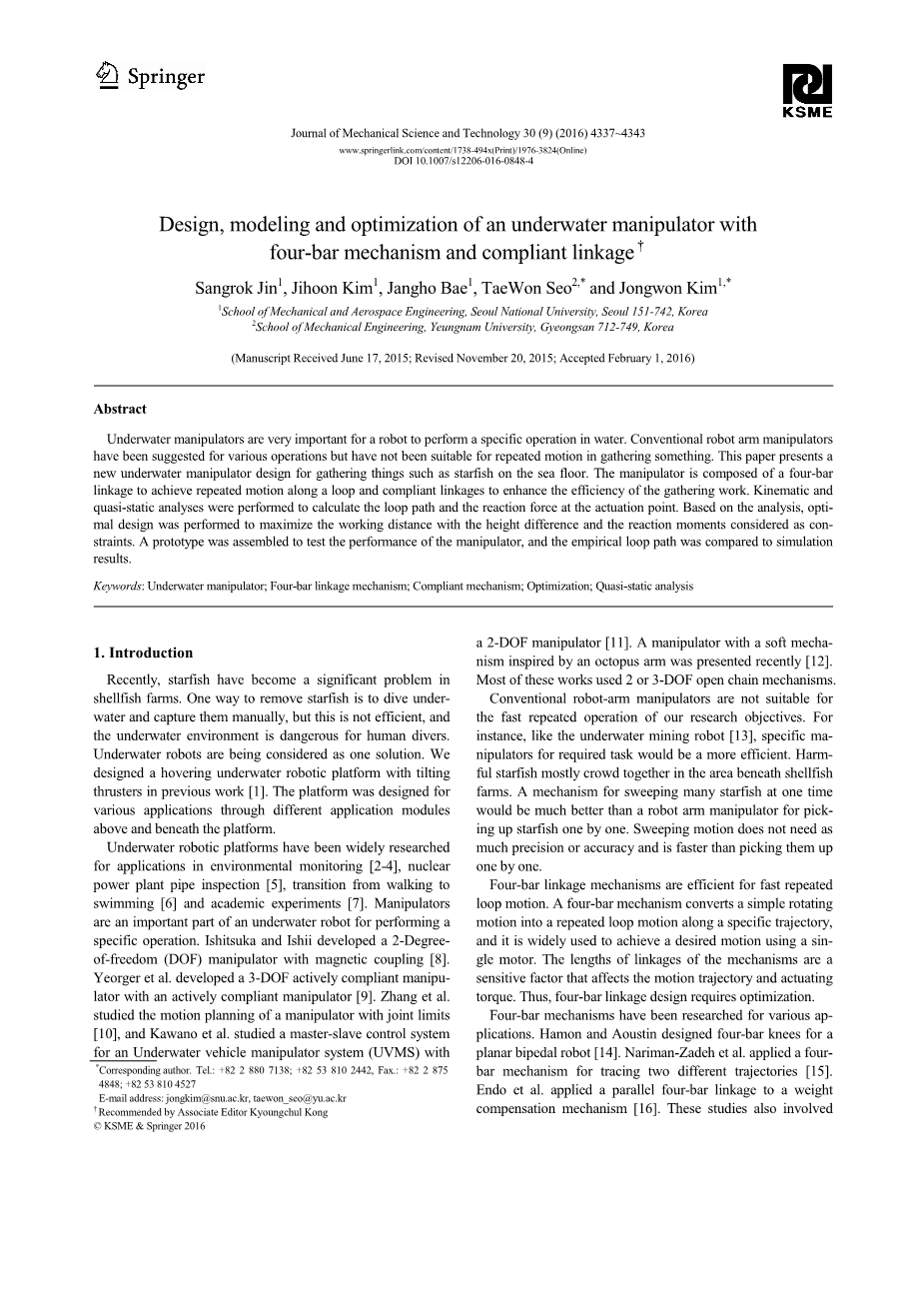
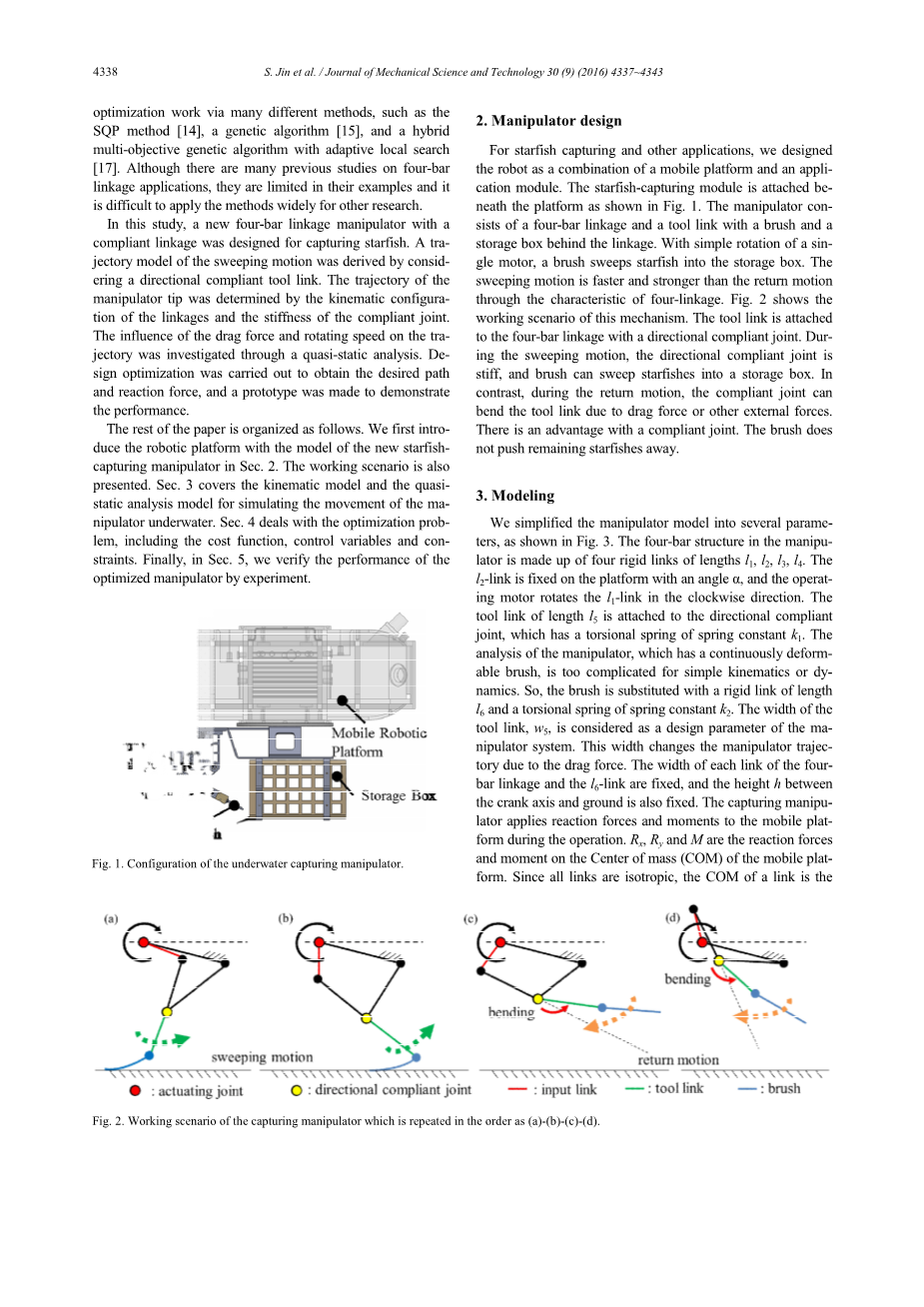
对于海星捕获和其他应用,我们将机器人设计为移动平台和应用模块的组合。海星捕获模块连接在平台下方,如图1所示。机器人包括一个四杆连杆和一个工具连杆,连杆后面有一个刷子和一个存储箱。 通过单个电机的简单旋转,刷子将海星扫入存储箱。通过四连杆的特性,扫动运动比回程运动更快更强。图2显示了这种机制的工作场景。工具链接通过方向兼容接头连接到四连杆机构。在清扫动作中,指向性柔性接头很硬,刷子可将海星扫入储存箱。相反,在返回运动期间,由于阻力或其他外力,柔性接头可以弯曲工具连杆。柔性接头有一个优点。刷子不会将剩余的海星推开。
3.造型
我们将操纵器模型简化为几个参数,如图3所示。操纵器中的四杆结构由长度为l1,l2,l3,l( TF51)。l2 - 链接以角度alpha;固定在平台上,操作电机按顺时针方向转动l1 - 链接。 长度为l的工具连杆5连接到具有弹簧常数k1的扭转弹簧的方向柔性接头。对连续可变形刷子的操纵器的分析对于简单的运动学或动力学来说太复杂。因此,刷子被长度为l的刚性连杆6和弹簧常数k2的扭转弹簧代替。工具链接的宽度w5被视为机械手系统的设计参数。该宽度由于阻力而改变操纵器轨迹。四连杆机构和l6连杆的每个连杆的宽度是固定的,并且曲柄轴和地面之间的高度h也是固定的。捕捉操纵器在操作期间将反作用力和力矩施加到移动平台。 Rx,Ry和M是移动平台的质心(COM)上的反作用力和力矩。 由于所有链接都是各向同性的,因此链接的COM是链接的中点。
3.1 四杆机构的运动学模型
当四连杆机构的曲柄连杆以恒定的角速度旋转时,位置,速度和加速度所有四个关节和每个连杆的COM由四连杆机构的众所周知的运动学模型确定。工具链接所连接的关节的加速度是工具链接的动态模型的重要因素。
3.2 动态模型通过准静态分析
本节通过准静态分析处理对操纵器尖端轨迹的分析。如果所有的系统都是刚性的而没有任何兼容部件,我们只需要考虑运动学来找到轨迹。然而,连杆之间的两个扭转弹簧使得很难计算以非线性方式运动的机械手末端的运动,所以我们将该系统视为离散时间系统,并且在每个无限小时间步长准静态地计算运动学和动力学。
3.2.1 与画笔模型的工具链接
与四连杆机构不同,由于流体动力学影响柔性连杆的运动,因此需要两个工具连杆和两个扭力弹簧的动力学来获得轨迹。基于图4所示的自由体图,力和力矩平衡方程可以推导如下:
考虑内力和流体动力阻力,但假定连杆由中性浮力材料构成,则忽略浮力引起的力和力矩。si表示sintheta;i,ci表示costheta;i。在这六个方程中,未知量是四个内力和两个角加速度 -f45,x,f45,y,f56,x,f56,y,theta;5,theta;6
其他条款可以计算。例如,阻力和力矩D是关节角度和角速度的函数,并且由扭转弹簧产生的恢复关节力矩是关节角度的函数。关节角度和角速度可以通过反馈来自迭代的最后步骤的信息的积分来获得。轨迹由关节角度确定。l4 - 链接和l5链接之间的内力f45,x和f45,y反馈到四连杆机构的逆动力学中,以找到净反作用力和力矩。
3.2.2 四连杆机构的逆动力学
在从运动学模型获得关于四杆机构运动的信息之后,可以计算逆动力学。在这个程序中,我们找到了所需的电机扭矩曲线以及确定四连杆机构轨迹的连杆之间的内力。 扭矩曲线用于选择原型的电机。在连接到mo-接头的接头上的内力f 12和f 23,平台上产生反作用力和瞬间移动平台的COM,用于优化过程。
3.2.3 在接触条件下的反作用力
当机器人的末端接触地面时,机器人始终以清扫动作进行操作,并且因方向性而导致的工具连接变得僵硬。l4链接和l5链接看起来像一个刚性单一链接。 链接的所有位置都可以通过运动学来确定。 因此,在接触条件下不需要工具链接模型和顺应性反动力学模型。 假定反作用力和力矩是由法向力和地面摩擦力引起的,则完全确定操纵器的结构和力矩平衡方程。移动平台的COM上的反作用力和力矩可以在每次迭代步骤中仅使用接触条件下的静力学来计算。
4.最佳设计
4.1 成本函数
为了最大化一个工作周期捕获的海星数量,我们使用“冲程步长”作为成本函数,这意味着画笔在一个循环周期内扫动地面的距离,如图5所示。这种优化的目标是成本函数的最大化。
4.2 设计变量
设计参数在Sec.3。如表1所示,使用了3个连杆。四连杆机构的每个连杆的宽度为10mm,l6的连杆宽度为60mm。操作电机的角速度为pi;/ 6弧度/秒,曲轴与地面之间的距离为200毫米。 假设地面是由湿砂组成的,则刷子与地面之间的摩擦系数为0.7 [18]。
-
- 约束
在优化中,有五个约束条件:
构成四连杆机构的四个连杆长度应位于合理区域内。并非所有随机长度的组合都可以组成四连杆机构,但可以使用Grashof定律进行检查。
“行程高度”定义为返回运动的最低点与地面之间的距离,如图4所示。该高度必须大于30 mm。行程高度防止刷子的末端在返回运动期间将海星推开。
机器人永远不能不扫地,其他环节绝对不能与地面碰撞。
刷子末端的轨迹必须收敛到闭环。如果顺应关节的弹簧常数太低,则顺应连杆会发生振荡,并且轨迹变得发散。
x和y方向的最大反作用力和力矩分别设为plusmn;30 N,plusmn;40 N和plusmn;10 N·m。 我们假设平台在模拟中固定在空间中。 然而,在实际工作情况下,机械手运动引起的反作用力和力矩对整个平台和机械手系统产生干扰。基于移动机器人平台的性能,最大值受到限制。
4.4 优化结果
优化使用可信区域算法完成。表2总结了最佳设计参数。发现行程步长为255.6mm,行程高度为44.9mm。 最大反作用力和力矩分别为7.22N,4.06N和1.60N·m。该基于最优设计参数的仿真结果显示了刷子末端的轨迹,如图6所示。
5.实验
如图7(a)所示,原型是基于优化设计制造的。无刷直流(BLDC)电机和电机驱动器装在一个密封的盒子里,驱动轴用旋转密封圈密封。车架和四连杆机构由铝制成,工具连杆和储物箱由丙烯腈 -丁二烯 -苯乙烯(ABS)制成。画笔是由聚丙烯(PP)制成。 操纵器必须从移动平台供应电力和控制信号。如图7(b)所示,操纵器可以连接到平台上。
原型实验在水箱中进行。 具有柔顺性的四连杆机械手成功地清理了底部的海星并捕获海星。 一个周期需要12秒。 作为类似的例子,传统的水下机器人手臂在非专家飞行员的遥控操作中花费了大约4分钟的时间用于遥控操作中的黑盒恢复任务,并且自主执行需要大约40秒[19]。 根据对潜水员的采访[20],人类潜水员平均在5秒内捕获海星。 这种带有四连杆机构和柔性接头的捕获机械手比机器人手臂快,比潜水员慢,但是刷子可以一次将多个海星一起扫入储存箱,如图8所示。如图9所示比较了实验和模拟中刷子末端的轨迹。原型的冲程跨度为260mm。扫动运动中的轨迹在实验结果和模拟之间很好匹配,但返回运动中的轨迹有一些错误。 扭转弹簧的弹簧常数和简化的阻力模型的制造误差被认为是轨迹误差的原因。 起始返回运动中的轨迹误差不会影响捕捉性能,因为操纵器具有合规性。
6.结论
我们介绍了用于捕获海星的水下四杆机械手的设计,建模,优化和实验验证。该机械手设计成四连杆机构,对于用刷子反复扫动是有效的。为了解决这个问题,为了解决轨迹和反作用力,通过准静态分析推导了一个带有兼容工具连杆的四连杆机械手模型。通过优化获得最大化的冲程步幅的最优设计参数。基于最优设计的原型展示了捕获海星的过程。冲程步幅为260毫米,操作员一次成功地扫过多个海星。该机械手将很快安装在水下移动平台上以捕获海星。
7.致谢
这项研究得到韩国国家研究基金会(NRF)的资助,韩国政府教育,科学和技术部(MEST)资助(第2011-0009596号)。
8.参考
[1]S. Jin,J. Kim,J. Kim和T. Seo,2014年IEEE / ASME高级智能机电一体化(AIM)国际会议,法国贝桑松(2014)1547-1551,悬停四个倾斜推进器的水下机器人平台。
[2]A. Carlson和N. Papanikolopoulos,Aquapod:两栖翻滚机器人的原型设计,2011年IEEE机器人与自动化国际会议(ICRA),中国上海(2011)4589-4594。
[3]F. Shkurti,A. Xu,M. Meghjani,JCG Higuera,Y. Girdhar,
P. Giguere,BB Dey,J. Li,A. Kalmbach,C. Prahacs,K.
全文共8233字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11524],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

