
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
带有手机APP控制的LED图像显示系统
摘要: 此次设计的LED(发光二极管)图像显示系统,可以在自行车辐条上显示图案。人们在车轮的LED灯上设置此系统可以产生美丽的图案来提升安全性,该系统主要是在主控板上使用嵌入式系统和电路设计来设计可以显示图案的LED照明条。同时使用一个移动应用程序来远程控制照明硬件,该系统与主控制器通过Wi-Fi无线网络接口来实现通信。骑自行车的人可以用这个移动应用程序或在骑行前按主控板上的按钮来改变图像显示模式。该系统设计了六种图案用于显示,并且可以设置图案按一定时间间隔反复变化。实验结果表明,设计的系统在车轮上有效地执行,可在40公里/小时以下的速度中有效工作。
关键词: LED Wi-Fi无线网络 图像显示 嵌入式系统
1.设计目的及意义
随着环保意识的增强,人们越来越多地使用自行车进行短途出行,而不是汽车、摩托车等燃料车辆。许多人将骑自行车作为他们的主要休闲活动,今天的城市道路上还有专用的公共自行车道。自行车不同于其他形式的交通工具,因为它们自身没有发光器件,夜间照明不足时通常会让骑车人处于危险之中。在台湾,约有170人死于骑自行车。过去三年发生的事故中,超过一半的致命骑行事故发生在夜间。没有交通法要求骑自行车的人使用足够的照明,而骑车事故的主要原因恰恰是是夜间自行车照明不足,导致与汽车碰撞。大多数自行车在其后部安装有反光板,但其范围不到30米。当反光板被灰尘覆盖,它变得不那么反光。自行车的两侧都没有照明从垂直方向来警告其他车辆。因此,有必要在自行车车轮两侧装备灯光以避开侧面其他车辆造成的影响。许多轮式LED灯都是为满足要求而设计的,许多自行车还配备了LED灯条。一个非常明亮的LED灯带可以帮助其他人在夜间注意到自行车。使用这样的一块灯带可以减少发生自行车事故的几率。另外,自行车的轮子可以设计成显示图形或各种带有颜色的文字。这种设计不仅提高了驾驶安全性,而且还提高了自行车的外观。
此次设计的其余部分安排如下。第二部分调查了目前LED的图像显示应用。第三部分介绍所提出的系统结构。第四部分介绍了系统的硬件和软件。第五部分总结了使用所提出的系统获得的实验结果,并将它们与使用其他系统获得的结果进行比较。第六部分得出结论并提出有关未来研究的建议。
2.LED应用现状
目前的LED应用都集中在LED照明的有效控制,以及LED的二维、三维图片显示应用。高功率白光LED可用于室内通过计算相应的坐标来定位,四个LED传输三维坐标信息,由接近未指定位置的两个图像传感器接收和解调。未知位置是根据图像传感器附近形成的LED图像之间的几何关系计算的未知的位置。LED的另一种照明应用通过使用交互式LED照明接口来节省能源,该应用使用基于Zigbee的无线传感器网络(WSN)来监控和控制照明系统。每个控制LED灯包括微控制器,传感器和Zigbee WSN单元。Zigbee的信号可以自动关闭未使用的灯泡以节省能源。同样,使用LED照明系统的路灯也可以允许实时操作系统(RTOS)控制来节省能源。这种LED路灯系统可以自动控制并使用有关环境信息的传感器数据。二维图像显示系统,涉及三个彩色LED旋转列已被开发,频率扫描的速度和旋转速度足够高以至于人眼无法确定。显示数据处理在复杂可编程逻辑器件(CPLD)中实现。远程PC可以重新排列新的模式并传输它通过RS232,USB和无线网络连接到显示系统。2D图像显示器也可以用在汽车车轮上。这种显示系统利用一个,两个或三个LED条,每个LED都由高分辨率灰度LED组成。
实验结果表明,当车轮以小于5公里/小时的速度旋转时,可以获得破损图像。以5公里/小时到60公里/小时之间的的速率旋转可以产生完整模式。这个显示系统可以适用于其他移动机械设备,它包括三个主要部分:一是一个电子板与一个微控制器,驱动器和一系列LED组件;二是具有稳定的速度以确保正确旋转的电机;三是电源模块。系统以稳定的速率显示包含图像和文本的图案。专用的3D显示系统包括一个由LED组成的2D旋转面板,它依赖于“持久视觉”生成一个3D图像。图形控制子系统由PC软件,FPGA和支持电路组成。该系统可以以完整的360度视角显示3D图像和视频。所提出的系统结合了嵌入式系统和电路设计技术。设计的LED照明条是安装在自行车车轮上,并显示各种图案。用户可以使用移动应用程序控制图像更改。该模式是通过旋转安装在辐条上的LED灯带而获得的视觉持久性。骑自行车的人想要改变车轮上的图像,可以在骑行之前按下安装在车轮的主控板上的按钮。嵌入在主控制板上的基于ARM的微处理器执行成像算法,并通过I2C(Inter-Integrated)将控制命令发送给三个LED灯条电路接口。所提出的系统提高了安全性,并产生了美丽的图像。
- 系统结构
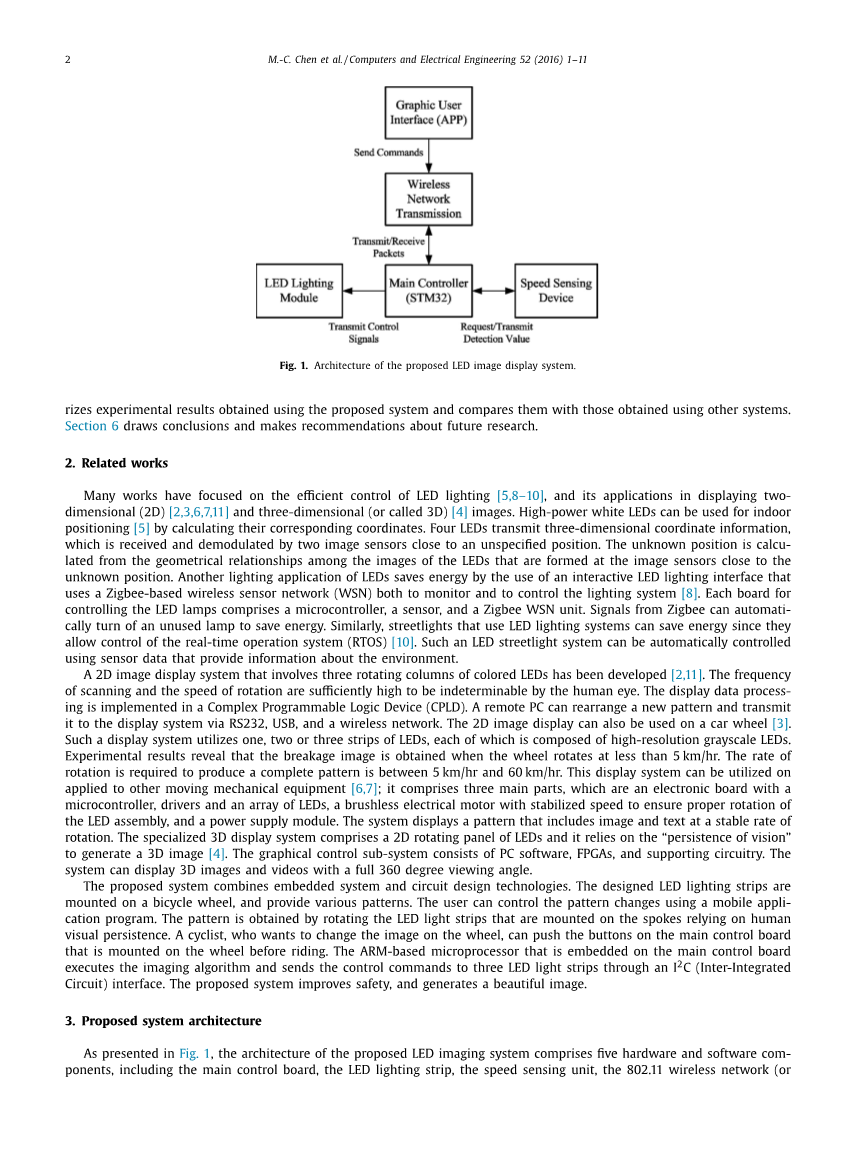
图1.LED图像显示系统结构
如图1所示,所提出的LED成像系统的体系结构包括五个硬件和软件组件,包括主控板,LED照明条,速度感应单元,802.11无线网络(或Wi-Fi)传输界面和移动应用程序。 该系统可以通过显示各种图像由于人类的视觉持久性,旋转安装在自行车轮上的LED灯条。 显示车轮也可以通过Wi-Fi无线使用远程移动应用程序(称为移动APP)进行控制网络。
支持LED成像的五个组件如下:
(a)主控板
主控板控制安装在车轮上的所有硬件设备,包括LED照明带,速度感应单元和无线网络接口。主控制器是一个STM32 ARM微控制器,它接收来自远程移动APP的控制命令或者接收其他发送的命令手动推动按钮。
(b)LED照明条
LED照明条从主控制板接收控制信号,使其改变自行车上的图像轮。控制信号控制开启并关闭LED及其颜色,并根据I2C接口协议传输。
(c)速度感应单元
速度感应单元使用磁性传感器来检测车轮的速度。该传感器包括一个簧片开关一块磁铁。当磁铁距簧片开关小于13毫米时,会产生一个特定信号来指示车轮已经旋转了一圈。因此,可以使用数学方程和时间计算来保持车轮的转速。转速被传送到主控制器的微控制器控制板和LED照明条的特定控制信号。
(d)无线网络传输接口
无线网络传输接口是远程APP与主控制板之间的通信接口。本机通过Wi-Fi无线网络传输所有命令或图像数据。
(e)移动应用程序
移动应用程序(移动APP)用于控制LED照明模块显示的图像。手机APP拥有基于Android操作平台的图形用户界面。用户可以安装程序在手机或平板电脑上使用,并通过Wi-Fi来控制LED成像系统的硬件网络。
4.操作系统
图1介绍了系统的主要功能单元。系统的硬件和软件必须配合使用彼此有效地显示车轮上的指定图像。旋转的速度和角度使用a来计算STM32 ARM微控制器,以确保图像稳定显示。硬件和软件的高效控制取决于对系统操作流程的准确了解。
4.1系统操作流程
图2.系统操作流程
图2介绍图像显示系统的操作流程。 LED灯带执行图像显示流程,设计的系统在系统启动时初始化所有硬件设备和软件程序。该系统的两种控制模式是手动控制模式和遥控模式。手动控制可以使用主控制板上的外部按钮进行设置,遥控模式由一个移动APP执行通过Wi-Fi连接安装在手机上。应用程序可以在手机和主控板间建立联系,当主板从移动APP接收到数据包时,它确定哪个数据包后将由LED灯条生成图像。
这两种控制模式的实现是通过选择存储在STM32微控制器存储器中的相应图像模式。中断延迟确保成像图案在正确的时间从主控制器传输板到LED照明模块。中断延迟随着轮子的旋转速率而变化,中断延迟是随着旋转速率的增加而缩短,以确保显示的图像符合规定,因此旋转的速度在所有情况下都支配中断延迟来显示图像。
4.2硬件电路
此次设计系统的几个硬件组件包括主控板和三个LED照明带子。三个LED灯条在车轮上执行LED成像功能,成对的主控板被一个角度分开120度。以下描述执行成像功能的两种主要电路板。
- 主控板
图3.主控制板电路
图3介绍主控制板。主板从远程应用程序接收控制命令,在将控制信号传输到LED照明条之前执行成像算法。主控板还接收来自速度感测装置的反馈信号。ARM STM32微控制器提供电路板之间的主要通信接口并执行成像算法来控制LED图像显示在车轮上。该电路板中的通用输入/输出(GPIO)端口将电路板连接到其他电路板电路板。主控板上还配置了无线网络模块(Wi-Fi)来传输命令或主控板和移动APP之间的数据。
- LED照明条
图4. LED照明条的电路
图4介绍设计的LED照明条。LED照明条包括十六个LED芯片。该系统包括三个LED照明条显示图像。轮子的大小决定了LED芯片的数量灯柱的长度。较大的轮子需要更多的LED芯片来显示图像。每个LED灯带都有三个解码IC(或称为解码器)来解析来自STM32的输入数据包和控制命令主控制板上的微控制器。解码器接收控制命令后对它们进行解码,控制相应的LED芯片,并设置其颜色。该照明条使用I/O扩展器来控制所有LED芯片。
4.3 软件界面
图5.移动应用程序界面
图5介绍基于Android的移动应用程序的图形用户界面。手机APP已安装在手机上。当手机上的Wi-Fi无线网络连接功能连接相应的Wi-Fi时接口在主控板上,骑车人可以控制自行车辐条上的LED灯条的显示模式。手机APP首先进入用户可以选择六种模式,当用户选择图案时,LED一旦车轮的转速达到特定值,照明模块就会显示该图案,其中的高级模式也可以让用户能够设置各种模式的顺序循环和每个模式的持续时间。
LED灯带由移动APP通过Wi-Fi无线网络控制, LED的控制程序照明条安装在主控板上,来自控制界面的命令和反馈信息LED模块采用TCP/IP和Wi-Fi协议进行无线通信封装。一个特定的数据包格式是用于移动APP和主控板之间的通信。Android操作系统的套接字作为这两个远程单元之间的通信接口。当LED照明系统启动时,APP在手机上通过Wi-Fi网络与自行车连接。GUI用于选择模式并设置时间段每个显示,用户可以选择高级模式进一步控制各种模式之间的指定持续时间的循环变化。系统执行时APP也会收到来自主控板被异常执行的错误或警告信号。
4.4 LED照明控制程序
该系统使用两种主要的LED照明控制程序,即移动控制和图案生成程序。
- 移动控制程序
图6.移动控制程序
图6给出了移动控制程序。该程序执行基本和高级显示选择。手机APP通过Wi-Fi网络连接主控板时,APP的界面可以是用于选择显示模式,在基本选择模式中可以通过发送六种显示模式进行选择来自APP的相应命令,选定的花样显示在轮子上,直到选择新花样。高级选择模式用于选择多个模式并在特定时间间隔内显示它们。
- 图案生成程序
图7.模式生成程序
图7是设计的模式生成程序。该程序已安装并执行在主控制板的ARM微控制器中;它从手机接收模式选择命令APP或主控板上的手动按钮。当程序收到命令时,它通过执行相应的颜色功能或来接收称为GetColor(函数)关于图案中的初始颜色的信息。车轮上的簧片开关激活外部中断来计算所需的时间由轮子旋转一次。轮子旋转一度所需的时间计算如下公式(1)。
变角度时间表示车轮旋转一度所需的时间,是从轮子旋转开始时的时间计算出来的,它用于计算当前角度。相关等式如下公式(2)。
CurrentAngle参数是根据簧片开关激活中断的时间来计算的,可以是使用S
全文共9205字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11406],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 拟人手臂的轨迹规划与轨迹跟踪控制外文翻译资料
- 新型磁性辅助内窥镜系统在上消化道检查中应用的可行性 和安全性外文翻译资料
- 基于FPGA可编程逻辑器件的复合视频图像处理外文翻译资料
- 从被测的高频域原始信号中提取巴克豪森噪声外文翻译资料
- 重型机床z轴热误差混合建模方法外文翻译资料
- 一个红外浊度传感器:设计与应用外文翻译资料
- 用于控制食物烹饪过程的电子系统.外文翻译资料
- 关于液体介质中电磁流量计的设计和理论上存在的问题。第二部分:关于带电粒子产生的 噪声理论外文翻译资料
- 基于LabVIEW和Matlab的小波变换对非平稳信号的分析仿真外文翻译资料
- 应用于腹腔镜手术的新型膜式加热加湿器 的开发外文翻译资料

