英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
IEEE TRANSACTIONS ON POWER ELECTRONICS,VOL。 22,NO。 6,2007年11月 2487
一种IPM同步电机直接转矩和磁通调节的变结构控制方法
IEEE的学生会员庄旭和IEEE高级会员M. Faz Rahman
摘要为了提高内置式永磁同步电动机的高性能,提出了一种非线性变结构控制器来控制转矩和定子磁链。 建模和实验结果表明,扭矩和通量波纹已显着减小。 经典的直接转矩控制的快速响应和鲁棒性优点通过消除滞后现象和现有的扭矩和流量的比例 - 积分控制器得以保留。 通过用闭环观测器取代开环磁通和转矩估算器,驱动系统在非常低的速度下达到高性能,在半满载情况下降至10 rpm(0.33 Hz)。
关键词 - 直接转矩控制(DTC),内置永磁(IPM)同步电机,转矩和磁链脉动,变结构控制(VSC)。
- 介绍
磁铁(IPM)电机与感应电机相比具有许多优点,例如整体效率,磁阻转矩的有效使用,更小的损耗以及紧凑的电机尺寸。此外,基于凸极行为的通量弱化控制的使用支持更宽范围的速度。已经提出了多种用于控制IPM同步电机驱动器的解决方案[1] - [5]。其中,IPM同步电机驱动器的直接转矩和定子磁链控制已经发展为直接转矩控制(DTC)[1]。 DTC策略是一种感应电机控制技术[6],该技术取得了成功,因为它明确考虑了电压源逆变器的变结构性质,并且使用少量机器参数,但比场定向控制(FOC)更加稳健, 。 DTC具有快速响应,结构简单和对建模不确定性和干扰的鲁棒性。与传统的FOC相比,其优点包括取消在转子参考系中操作的电流控制器,相关的坐标转换,连续转子。
手稿于2006年11月26日收到; 2007年2月23日修订。建议由副主编A. Tryznadlowski出版。
Z. Xu与哈尔滨工业大学电气工程与自动化学院,哈尔滨150001(电子邮箱:zhuang.xu@gmail.com; zxu@hit.edu.cn)。
MF Rahman是澳大利亚悉尼2052新南威尔士大学电子工程与电信学院(电子邮件:f.rahman@unsw.edu.au)。
本白皮书中的一个或多个数字的彩色版本可在网上查阅http://ieeexplore.ieee.org。
数字对象标识符10.1109 / TPEL.2007.909208
位置要求和独立电压脉宽调制器。 但是,它仍然有一些缺点,可以总结为以下几点:
- 高扭矩,磁通和电流波纹;
- 可变开关频率行为;
- 很难以非常低的速度控制转矩和通量。
为了改善经典DTC的性能,存在可以分为四类的不同解决方案。 第一类是硬件相关的,通过使用多电平逆变器[7],[8],可以产生更多的控制电压空间矢量以减小转矩和磁通脉动。 随着更多的电力交换机的需要,系统成本和复杂性增加。 野口等人 [9],[10]提出在通量和转矩误差上叠加一个高频和小幅度三角抖动信号,以抵消反馈信号中的延迟时间。 借助额外的硬件,该方法实施起来很简单,并且可以在DTC控制器中实现更快的开关频率。 尝试改进切换表在第二类[11]。 但是,实验结果表明,对于减小转矩和磁通脉动没有显着的改善。 在第三类中,采用预测算法来计算最合适的电压空间矢量以最小化估计值与磁链和转矩的实际值之间的偏差。 在这些努力中,[4]和[5]报道了一些基于空间矢量调制的固定开关频率和低转矩脉动的PM机器驱动的修正DTC方案。 在这种控制方案中,部署了两个或一个比例 - 积分(PI)控制器来控制定子磁链和转矩。 它们的缺点是,对于特定增益集合,比例积分(PI)控制器对电机参数,速度和负载的变化敏感。 此外,根据线性系统的频率响应理论,PI控制器在某些频率的正弦响应中存在滞后现象。 在最后一类中,米尔等人。 提出了基于模糊逻辑的DTC来提高经典DTC的性能[12]。 在计算机建模中报告了快速转矩动态,但是没有给出实验验证。
变结构控制(VSC)策略是对具有不确定性的非线性系统有效的高频开关控制。 它具有实施简单,抗干扰性强,鲁棒性强,响应速度快的特点。 针对感应电机的VSC-DTC驱动器[13]提出了定子磁通定向和控制。 它被命名为“线性和可变结构控制”(LVSC)并采用开关组件和a
0885-8993/$25.00 copy; 2007 IEEE
线性PI调节器分别用于转矩和通量。 控制器在定子参考系中运行,并不断需要定子磁链矢量的位置。 驱动系统性能在很大程度上取决于定子磁通估算的精度。 这个问题尤其在极低速度地区显而易见。 本文首先回顾了第三节中的传统DTC,然后提出了一种用于IPM电机的非线性变结构DTC算法,以克服现有DTC的一些缺点。 所提出的策略大大减少了扭矩波动。 经典DTC的快速响应和鲁棒性优点通过消除磁通和扭矩的PI调节器而完全保留。 通过使用SVM策略,开关频率是恒定的和可控的。
- IPM同步电机的建模
转子中IPM同步电机的电路方程
- 旋转坐标由
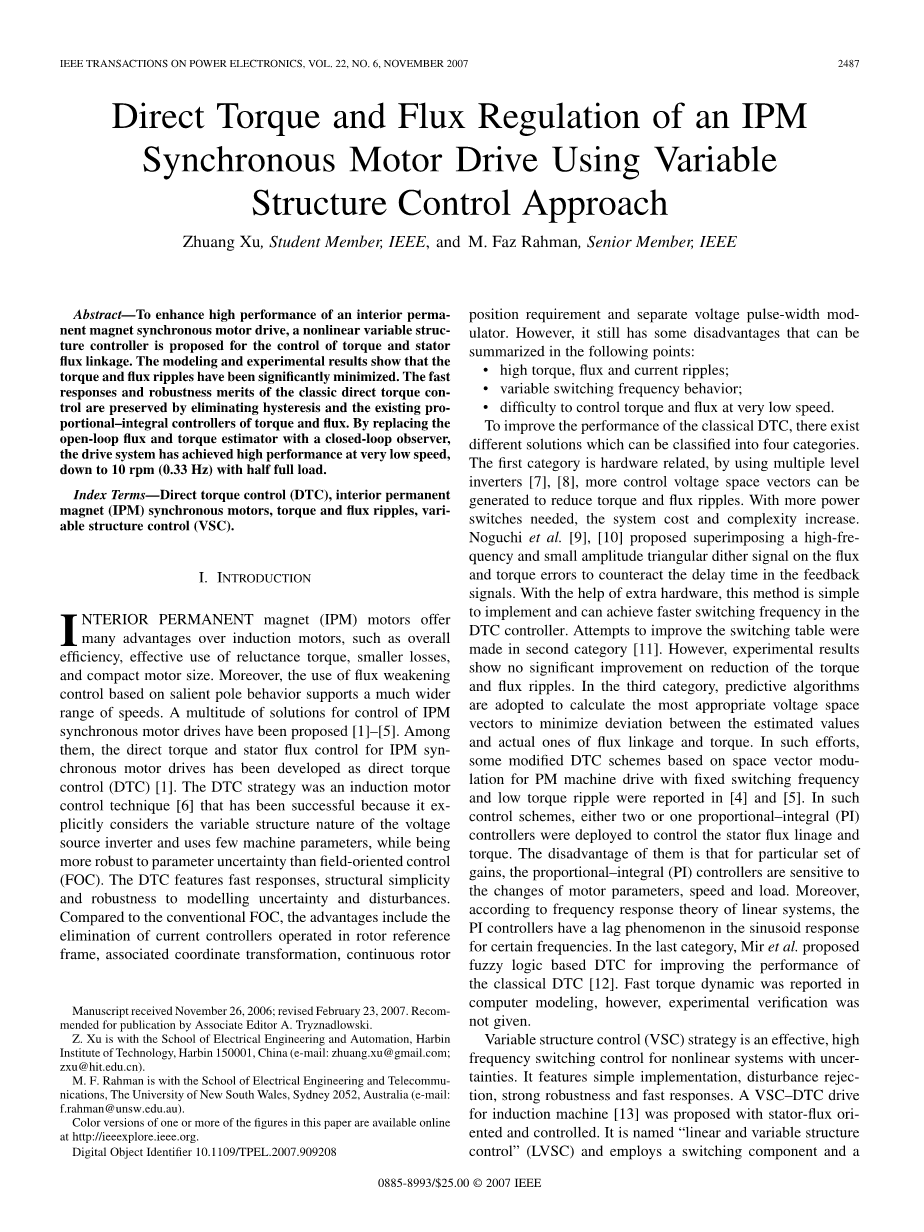
图1. VSI逆变器馈入DTC IPM驱动器的基本方案。
是定子磁链
, , 和是转子架中的电压和电流。 是微分算子,是电场和磁场(EMF)常数和是转子电子速度,直接转换为静止参考框架将使模型变得复杂 可以明确地重写IPM机器模型以检索转子参考系(2)中的基于显着性的EMF [3]。 基于显着性的EMF包括反电动势和条由显着性产生。
(2)可以转化为静止参考系
(3)
(3)右边的第二项被定义为一个显着的EMF
(4)
使用(3),IPM同步电机的新型号可以用(5) - (8)来描述,
(5)
(6)
(7)
估算的扭矩在哪里,并且是极对的数量
(8)
其中是定子磁链规范的平方。
- 针对IPM电机的标准DTC的审查根据标准DTC的操作原理,
在每个采样时刻,切换策略选择合适的电压矢量,以将转矩和磁通限制在其各自的磁滞带内。 该方案如图1所示。转矩和磁通控制器是两级迟滞比较器,它们根据转矩和磁通误差产生离散信号作为开关表的输入。 切换策略直接产生电压源逆变器(VSI)切换信号,而不涉及任何脉宽调制(PWM)。 DTC算法在静止参考帧中进行。 位置信号仅用于启动; 之后,位置信号对于磁通和转矩控制将不再是必需的。 IPM的初始转子位置也可以在没有编码器的情况下获得,并具有可接受的精度(位置估计误差5%)[14]。 因此,FOC所需的连续位置信息的要求被消除。
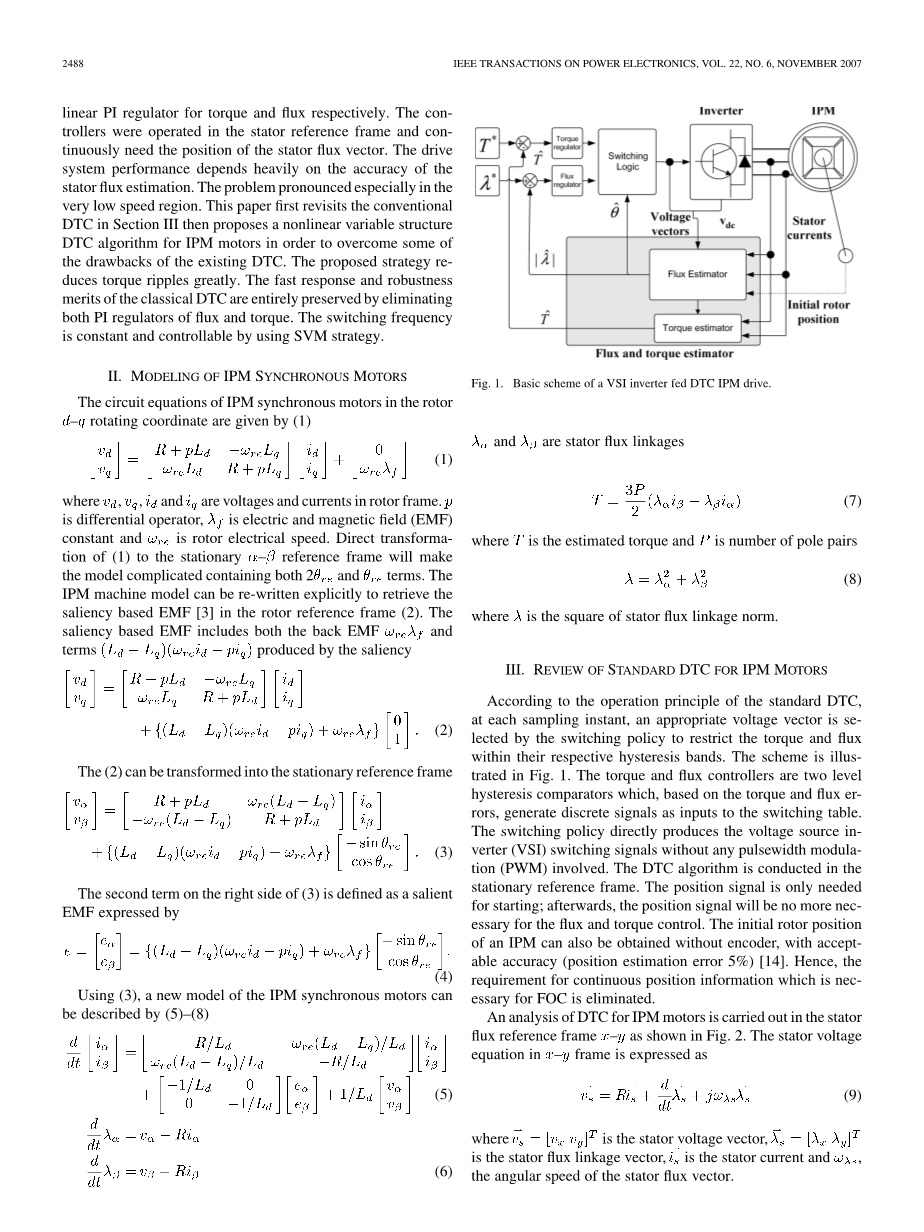
在定子磁通参考框架中对IPM电动机的DTC进行了分析 - 如图2所示。定子电压等式框内表示为
(9)
其中是定子电压矢是定子磁链矢量,I是定子电流和定子磁链矢量的角速度。
图2.投影在定子通量参考系上的电压矢量的转矩和磁通分量。
- 定子磁通矢量的幅度由位于y轴右侧的控制矢量增加,并且由向量减少到左侧。
- IPM的DTC切换策略
在每个采样时刻,检测定子通量矢量的幅度和位置。 根据磁滞控制器的误差信号,并参考磁通矢量所在的扇区,[1]中的切换策略将选择一个合适的电压矢量来减少误差。
- 稳定转矩控制的条件
根据(12),在[1]中已经证明,如果满足(15)和(16),则可以实现稳定的转矩控制
定子通量矢量在x轴上定向并对齐,所以它的y分量是零。 电压(9)变为
.
(15)
(16)
(10)
忽略定子电阻电压下降,并假定时间间隔足够短,磁通变化表达式可写为
(11)
类似地,调用磁通和转矩响应之间的时间尺度差,在恒定定子磁通幅度下,在一个采样时间[1]期间的转矩变化被推导为
(12)
其中转矩角度的变化率是
(13)
用(10)的底部方程代替,得到转矩变换
(14)
哪里 3 2 2
和 0是稳定转矩控制的必要条件。 是转子的角速度,\是转子磁通。 公式(11)表明施加电压矢量的x分量产生定子磁通变化,定子磁通变化具有与电压和施加电压的时间间隔成正比的方向和振幅。 从(14)可以看出,组件是显而易见的的施加的电压矢量有助于随时间的转矩 变化当达到扭矩和通量之间的充分解耦时。 现在
转矩和转子速度值也影响转矩变化,上面的推导可以总结如下。
-
- 沿着(图2)位于x轴上方的电压矢量产生转矩的瞬时增加,而下面的电压矢量将减小转矩。
与IPM电机的标准DTC相关的问题是定子磁通估算中的误差,低速性能差,转矩和磁通的高波动,可变开关频率特性以及缺乏完整的稳定性分析和设计工具。 在标准的DTC [1]和随后的改进的驱动系统[5]中,定子磁链通过积分定子感应电压
/\/。 即使电压和电流信号中的微小直流偏置也会通过积分积累,从而在估算的定子磁链矢量中形成实质偏移。 开环通量估算的一个解决方案是采用一个闭环观测器,它利用误差修正项来增加其鲁棒性并改善动态性能。 观察者的精确度对于低转速范围内的直接转矩控制IPM驱动非常重要。
它强调了IPM电机的标准DTC是由单个全电压矢量实现的磁滞式bang-bang控制,因此在转矩和磁通中会产生较高的抖动。 除了使用特定的ASIC或多电平逆变器之外,避免此问题的一种方法是使用带DTC IPM驱动器的可变结构控制器。 这个新的控制方法在下一节中进行描述和评估。
- 变结构控制方案
变结构控制策略基于不连续控制信号的设计,该控制信号驱动系统状态朝向状态空间中的特殊流形。 这些流形的选择方式使得系统在状态向它们汇聚时具有期望的行为。 在本文中,基于标准DTC概念,开发了一种用于直接转矩和定子磁通调节的可变结构控制器。 实施很简单。 IPM电机驱动器的框图如图3所示。外部回路包含一个速度PI控制器,它为转矩控制器产生参考转矩指令。 内部回路包括可变结构DTC控制器,该控制器计算最合适的定子电压矢量以驱动转矩和磁通来跟踪其参考。 在进入SVM模块之前,控制定子电压信号已被限制。 空间矢量调制提供了一个解决方案
图3.变结构直接转矩控制的IPM电机驱动的框图。
分辨率控制和恒定的逆变器开关频率 通量估计器模块是使用第六节描述的自适应磁通观测器实现的,其收敛性在附录B中得到了证明。
控制策略比DTC更具优势。 在DTC方案中,由切换表选择的电压矢量在采样时刻可能是正确的,但在整个采样时间间隔内是不正确的。 其结果是扭矩和通量的不必要抖动,除非采样周期足够小。 经典DTC的另一个问题是转矩和通量的大小误差没有区分。 换句话说,无论转矩和磁通的大小误差如何,基于DTC的开关表总是在瞬态和稳态下应用全电压矢量。 所提出的在静止帧中操作的控制方案预测了适合于误差幅度的最合适的电压矢量,即小误差将由小电压矢量补偿并且不由全电压矢量驱动。 开关向量由对称SVM模块生成。 在每个采样间隔期间施加更多的电压矢量,该间隔被划分为更多的子间隔。 这增加了控制分辨率,并大大减少了转矩和磁通脉动。
- 扭矩和流量控制器
- 滑动表面
控制目标是跟踪所需的扭矩和通量轨迹。 所以滑动表面被设置为,开关表面为整体形式,或者也可以使用反步和非线性阻尼技术进行设计
(17)
(18)
哪里 和 是参考值与转矩的估计值和通量的平方之间的误差。这是积极控制收益。
0表示转矩调节,并且/ 0表示磁通量的平方跟踪。 当系统状态已经到达滑动流形并停留在表面上时,那么我们就有// 0。从(17)和(18)的导数等于零,这给出
(19)
(20)
上述方程确保误差(和)收敛到零。 /和/是正常数,并为所需的系统动力学选择。 由于(17)和(18)从一开始就是零,在整个瞬变过程中实现了完全的鲁棒性,系统将渐近地收敛到时间常数为1和1的原点。 误差动态的收敛速度由和/确定。 然后,设计任务减少到在不连续定子电压空间矢量的歧管/ 0和/ 0中实施滑动模式。
- 变结构控制律
其任务是设计一个VSC法则来驱动状态轨迹到上述切换表面的交点。 在这项工作中,VSC控制器被设计为产生用于SVM调制器的定子电压命令。
系统(5) - (8)在子空间上的运动投影是通过区分矢量得出的
(21)
(22)
用(7)和(8)替代以及它们的衍生物导致
(23)
其中衍生物的计
全文共13983字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11360],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

