英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
2014国际遥感和无线通信大会(RSWC 2014)ISBN:978-1-60595-151-5
基于平板电脑的汽车遥控系统设计
肖丽琴,鲍文佳,宣利,刘源生
摘要
本文主要涉及基于平板电脑的开放式无线信息处理系统的应用。 该系统由三部分组成:基于android的平板电脑,FPGA操作系统,传感器技术实验模块。 该系统正在开发应用,将原本由天线控制的遥控车改为由平板电脑控制的无线车,顺便将车的数据传送到平板电脑进行处理和显示。 该系统应用程序也可用于其他领域,如无人驾驶汽车,智能家居等。
第一章 介绍
该设计是基于平板电脑开发的开放式信息处理实验系统的二次实验应用开发。 该设计涉及硬件和软件。 本文介绍了传统遥控车如何在硬件方面进行改造,如何将车与开放式信息处理实验系统连接起来。 汽车硬件电路的改造和设计包括控制电路,数据收发电路和速度检测电路,使用户通过触摸平板电脑向汽车发送相应的控制信号,使汽车根据相应的反应做出反应。 本文提到的实验平台的开发和应用方法可以为平板电脑控制的汽车打下坚实的基础,在不久的将来可以得到很好的改善。
第二章 整体系统架构
2.1基于笔记本电脑的开放式信息处理实验系统的硬件结构
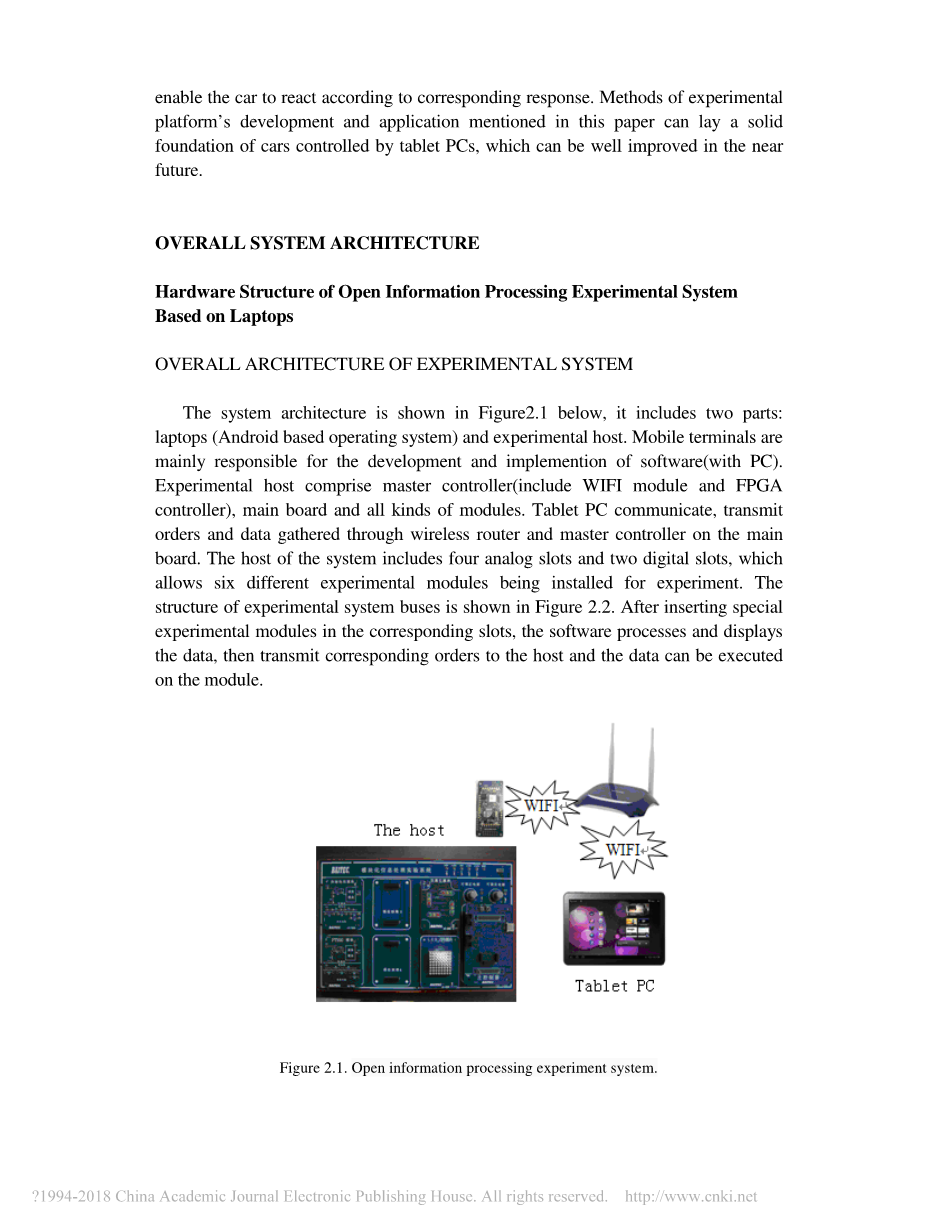
实验系统的总体结构系统架构如图2.1所示,它包括两部分:笔记本电脑(基于Android的操作系统)和实验主机。移动终端主要负责软件的开发和实施(使用PC)。实验主机包括主控制器(包括WIFI模块和FPGA控制器),主板和各种模块。平板电脑进行通信,通过主板上的无线路由器和主控制器传输订单和数据。该系统的主机包括四个模拟插槽和两个数字插槽,可以安装六个不同的实验模块进行实验。实验系统总线的结构如图2.2所示。在相应的插槽中插入特殊的实验模块后,软件将处理并显示数据,然后将相应的命令传输给主机,并在模块上执行数据。
2.2数字实验宿主模块介绍
该设计是利用已经形成的开放式信息处理实验系统的数字模块的二次开发。在这种设计中,数字通道1(插槽1)选择与远程汽车连接,远程汽车实现五个功能(前进,后退,左转,右转,灯光)。因此,将使用数字模块的五个端口。当主机接收到从平板电脑发送的命令时,它执行相应的处理,然后通过总线将数据发送到相应的端口。当与汽车连接的端口电压高达 5V时,可以执行相应的功能,最终实现带笔记本电脑控制模型车的功能。
第三章 移动终端与实验系统的通信
3.1实验系统和无线模块的交流
图2.3所示为数据采集和WIFI模块的结构图,这是系统的核心。主要部分是ALTRA制作的EP2C5T144C8 FPGA芯片,数据通道选择,数字I/O控制,WIFI模块通信,Command解析工作主要由FPGA完成。
异步串行通信的格式为115200波特率,每帧8位,一个起始位,无奇偶校验位,一个停止位。
3.2电动汽车模型的功能分析
原型号的接收电路主要由电源电路,红外接收振荡电路,晶体管8500,8050两个电阻H桥(H1,H2),RX-2芯片和引脚滤波电容组成。该车有五个功能,前进,后退,左转,右转和照明。前进和后退由H1桥的两个输出端口控制,这两个端口连接到称为M1的直流电机。左转和右转与上述内容类似。 所有这些功能主要由接收电路解码芯片RX-2控制。H桥驱动电路如图2.4所示。
第四章 远程汽车的硬件系统改造
4.1用WIFI接收数据
如果平板电脑要控制电动模型车,则必须将原始的红外接收控制模式转换为无线网络控制模式。在开放式信息处理系统中将原有的RX-2处理芯片替换为FPGA的上述主控芯片时,可以实现现有实验系统的二次开发。在前面的章节中,我们讨论了WIFI是实现移动终端和实验系统通信的桥梁,现在将介绍如何通过WIFI接收数据。平板电脑和WIFI之间的通信将通过无线模式实现。
WIFI模块和FPGA采用双向串行通信和IO控制命令的方式。
系统的数据采集是WIFI模块通过串口与FPGA进行通信(低电平为0,高电平为 3.3V),然后通过IO控制命令发送控制8位数字I/O口。WIFI模块的TX引脚和RX引脚
与FPGA的IO口连接,实现异步双向串行通信。WIFI模块的输入输出电平为 3.3V,FPGA的IO口输入输出电平也为 3.3V,因此可以直接连接而无需电平转换。
4.2控制电路的设计
原车的接收电路主要由RX-2芯片控制,将车辆的输入端口与实验系统连接起来,可以通过FPGA进行控制。设计是将汽车的5个输入引脚与数字插槽1连接实验箱。 两个H桥被保留。 此外,附带芯片MC74HC244ADT以保存系统。
以下是重建控制电路的工作原理:FPGA通过WIFI模块接收来自Tablet PC的命令,然后处理这些命令。 之后,FPGA向汽车发送命令,通过H桥放大信号,驱动直流电机。
4.3测速电路设计
方案1(使用霍尔元件):在车轮上安装一个小磁铁,在车轮旁边放置一个霍尔元件,在车轮的每一圈都会产生一个脉冲。 然后记录脉冲周期,可以计算出速度。
方案2(使用光传感器):在车轮上放置一个激光发射器,在车的旁边放置一个光传感器,车轮每转一圈都会产生一个脉冲。 速度将通过测量脉冲周期来计算。
由于霍尔元件具有精度高,可靠性高,成本低等特点, 所以计划1被采纳了。
4.4遥控车的数据分析
车轮直径:d = 39.18mm
汽车的速度和频率之间的关系:
(1-1)
首先,测量汽车的速度,平板电脑发送正向命令,然后使用示波器测量Holzer传感器发送的脉冲频率。 接下来发送加速命令并测量脉冲信号频率。 最后根据式(1-1)计算车速,实验结果见表4.1。
表4.1。 实验结果。
|
年级 |
频率(Hz) |
速度(m / s)的 |
|
第一 |
6.78 |
0.83 |
|
第二 |
13.36 |
1.64 |
|
第三 |
18.41 |
2.26 |
其他功能如表4.2和图4.1,4.2,4.3,4.2所示。
|
表4.2。 |
其他功能。 |
||
|
前进(后退) 图4.1 |
左转 图4.2 |
右转 图4.3 |
灯光 图4.4 |
|
radic; |
radic; |
radic; |
radic; |
第五章 结论
本设计包括基于android的移动终端应用,通信协议,FPGA系统的应用,传感器技术等技术领域。本文主要介绍如何改造传统遥控车的硬件电路。最后,与软件部分合作,设计符合所有要求,并为后续开发提供经验。
参考文献
[1]刘元生,李伟民,季士书。 “基于平板的开放式信息处理实验系统设计”,J。 北京联合大学:自然科学版,2013.10:20-23。
2. 严娇,刘志勇,“基于FPGA的多通道总线数据传输系统设计”,空军工程大学学报:自然科学版,2006.3:30-35。
3. 张宏才,陈卫东,“移动终端实现远程网络管理的研究与设计”,计算机科学,2007.9:73-76。
4. 吴健,石培林,“单片机控制下的电动助力转向系统遥控车”,农业装备与车辆工程,2008.1:13-14。
5. 刘元生,郭杰,王超岳,“基于网络的FPGA测试服务系统设计”,计算机科学,2012.39(z1):11-14。
2010第3届计算机与电子工程国际会议(ICCEE 2010)
IPCSIT vol。 53(2012)copy;(2012)IACSIT Press,新加坡
DOI:10.7763 / IPCSIT.2012.V53.No.2.39
无线遥控车的设计与实现
戴金波1,王少坤2,赵宏伟1, 2,王旭1
吉林大学计算机科学与技术系1,软件学院2,中国长春理工大学
摘要
由于系统平台的局限性,在智能机器人研究过程中,许多为智能机器人设计的图形和图像处理算法只能在PC机上模拟,但这些算法的实际效果无法测试在真正的机器人平台上。构建一个无线遥控车系统作为实验平台可以解决这个问题。我们使用Atmega128 MCU控制汽车的运动,并采用NRF24L01芯片作为收发器与计算机进行通信。通过加载C3088数码相机和手势识别测试,该平台的可用性最终得到验证。然而,测试结果表明,系统仍然有实时优化的空间,无线传输距离和功能复杂性。
关键词:智能机器人,遥控车,无线通信,人机交互,手势识别
第一章 介绍
近年来,智能机器人一直是研究人员的热点。对于智能机器人,基于人工智能模型的视觉技术理论,神经网络模型和认知模型不断涌现。这些技术通常需要大量复杂的图形和图像处理算法或信号处理算法作为补充。当提出算法时,真实机器人环境中的验证往往更具说服力和更有趣。同时,最重要的是,只有这样我们才能找到PC模拟中永远不会出现的问题。但是,由于缺乏工具和技术,直接在机器人环境中确认这些算法实际上很困难。例如,MATLAB不能用于机器人平台。为了解决这个问题,从功能需求和系统资源使用方面设计和构建无线遥控车作为测试平台。该平台采用分布式结构,图像传感器检测外部环境,以计算机为核心进行计算和决策。这样可以在遥控车上进行图像采集和局部预处理,在PC上执行需要资源或专用工具的复杂算法。PC和遥控车之间的信息交互是通过无线通信完成的。
第二章 无线遥控车的架构
系统总体设计方案基于Lagnese[1]提出的软硬件协同设计理论,从功能信息的角度来看,系统分为三部分:车端,PC端接收端和PC-控制端。如图1所示,系统的三部分通过不同的协议连接在一起,构成一个完整的系统。
2.1.1 汽车结束
图1中最左边的部分是车尾。它的功能是控制电动机,捕获图像,并将图像发送到PC接收器端。根据具体功能,车载端可以细分为三个模块:汽车控制模块,图像采集模块和射频(RF)接口模块。图像采集模块和射频接口模块是图像采集终端硬件电路的组成部分。
汽车控制模块通过控制四个直流电机与电子刷来实现控制操作动作,例如前进,后退,左转,右转等操作。每个操作都会有一个时间限制,持续1到3秒。汽车控制模块通过UART接口从RF接口模块接收PC控制端发出的特定控制命令,然后独立执行。图像采集模块控制图像传感器捕捉图像。射频接口模块负责将图像采集模块采集到的图像通过射频发送到PC接收端,同时负责从UART端口向汽车控制模块发送指令。
2.1.2 PC接收器端
图1的中间部分是PC接收器端,它与车端的RF接口模块具有非常相似的功能。它主要用于实现车载终端和PC控制终端之间的无线连接。它接收由车端收集的图像数据,并通过RF接口将控制命令发送给遥控车。有两个接口用于PC接收器端与PC控制端进行数据交换:RS232和USB。RS232提供的速度较慢,但是,由于开发和调试比较容易,因此该端口用于早期系统测试; USB端口提供更快的速度连接,最终确定为PC接收器端和PC控制端之间的接口。
2.1.3 PC控制端
图1中最正确的部分是PC控制端,它由PC主机和外设组成,是整个系统的决策和控制中心。这部分负责显示和处理图像数据和智能决策。如果要通过USB连接接收和传输数据,则必须包含与PC接收器端匹配的USB驱动器。它接收PC接收器端发送的图像数据。为这些数据添加基本格式信息后,它将成为图像,并且图像将显示给用户。同时利用PC系统平台上独有的资源和工具,采用图像处理方式对接收到的图像数据进行分析,这些方法在车端无法实现。 PC控制端程序返回处理结果的参数并生成无线遥控车应执行的命令。PC接收器端将它们发送到无线遥控车以实现相应的操作。
第三章 硬件架构
系统硬件由两部分组成,图像采集终端硬件电路和图像接收终端硬件电路。 图2显示了图像采集终端硬件电路的架构,图3显示了图像接收终端硬件电路的架构。
3.1图像采集终端硬件电路
图像采集终端电路安装在系统的车载终端,它是车载终端的物理层结构,图像采集终端电路的主要功能是完成汽车的采集并与PC控制器通信 - 通过无线电频率。 由于遥控车的移动范围较大,电路需要由电池组供电。根据这个事实,在选择电路元件和设计电路时,我们必须考虑功耗,同时在低功耗的情况下必须保证汽车的控制距离尽可能的远。图像采集终端电路采用Atmega128芯片作为MCU[2],这是一款高性能,
全文共9718字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[10730],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。
您可能感兴趣的文章
- 拟人手臂的轨迹规划与轨迹跟踪控制外文翻译资料
- 新型磁性辅助内窥镜系统在上消化道检查中应用的可行性 和安全性外文翻译资料
- 基于FPGA可编程逻辑器件的复合视频图像处理外文翻译资料
- 从被测的高频域原始信号中提取巴克豪森噪声外文翻译资料
- 重型机床z轴热误差混合建模方法外文翻译资料
- 一个红外浊度传感器:设计与应用外文翻译资料
- 用于控制食物烹饪过程的电子系统.外文翻译资料
- 关于液体介质中电磁流量计的设计和理论上存在的问题。第二部分:关于带电粒子产生的 噪声理论外文翻译资料
- 基于LabVIEW和Matlab的小波变换对非平稳信号的分析仿真外文翻译资料
- 应用于腹腔镜手术的新型膜式加热加湿器 的开发外文翻译资料

