
英语原文共 22 页
导管螺旋桨尾流动力学数值分析
QinZhanga,,RajeevK.Jaimanb
(a新加坡国立大学Keppel Nus公司实验室,b不列颠哥伦比亚大学机械工程系)
关键词:导管螺旋桨;混合RANS/LES模拟;尾流动力学;短波不稳定性;叶尖泄露涡
摘要:在Ren = 1.765times;105的雷诺数下数值研究了导管螺旋桨的尾流动力学和不稳定性。采用混合RANS / LES模型和瞬态滑动网格方法进行数值模拟,并将计算结果与现有实验数据进行对比。本文以相位平均、时间平均、瞬时流场和功率谱为分析工具,对导管螺旋桨的涡尾动力学进行了研究,探讨了零进流和各种推进系数下涡结构的演化和尾流不稳定性。本文对导管螺旋桨尾流中叶尖泄漏涡破裂的失稳机理进行了新的物理研究,发现短波失稳是导致湍流尾流中叶尖泄漏涡破裂的主要机制。此外,在所有模拟案例中,零流入条件触发了最复杂的湍流尾流模式。光谱分析表明零流入条件下的频率范围更广,能量更密集。文中还讨论了尾流随推进系数的增大而变化的情况。
1介绍 导管螺旋桨在现代旋翼系统中无处不在,从军用/商用海上推进系统、导管式风力涡轮机、潮汐涡轮机到航空涡轮机械、无人机和飞行器。与传统的开放式螺旋桨相比,导管式螺旋桨被非旋转喷嘴(护壳)包围,这提供了一些引人注目的好处,即物理保护、更大的功率密度、气蚀减少和扩大的工作环境。
当气流通过这些转子系统(例如螺旋涡流系统)时,会产生复杂的涡流结构。旋涡结构以高度非线性非定常方式由近场向远场对流。在近尾迹中,叶片和喷嘴的作用较为突出,而涡结构向下游迁移,形成远尾迹,而不受叶片几何结构和喷嘴的影响。特别是与叶片相关的螺旋涡系统可以经历三种不稳定性(Widnall,1972),即短波、长波和相互感应模式。螺旋涡系的失稳模式与螺旋螺距、涡核尺寸和涡强度有关。短波扰动是由涡核结构引起的,涡核结构可以产生由特征涡引起的应变或扭转。沿波扰动是在保持涡核不变的情况下,考虑局部螺旋几何结构整体的扰动。长波扰动可能由比涡核半径大得多的全球扰动引起。对于定向螺旋桨,叶片后缘尾迹和叶尖泄漏涡之间可能存在复杂的互感(Widnall,1972)。
导管转子工业设计的成功依赖于对其液压/气动性能以及振动和声学考虑的准确预测。例如,动态定位(DP)系统通常用于船舶和海上半潜式平台。为了保持船只或平台的航向及其所需的位置,推进器需要在DP操作期间抵消风力、波浪和海流力。
由于推进器尾流动力学的复杂性,对于基于DP的船舶和平台的精确保持能力,对推进器相互作用动力学的理解和量化以及与推进器-推进器相互作用相关的损失是必要的。
此外,安装在船体上的推进器可以产生大的振动和高的水下辐射噪声。需要更深入的研究,以了解作为控制参数函数的导管螺旋桨后的尾迹动力学和流动不稳定性。对于海上平台的动力定位系统,对平台浮筒下的螺旋桨布置进行优化时,需要对涡结构的演变进行精确的估算。
表1推进器参数(Cozijn和Hallmann,2012年)
|
参数 |
单元 |
数值 |
|
螺旋桨号 |
- |
5810R |
|
喷嘴号 |
- |
1393 |
|
螺旋桨直径D |
m |
0.10 |
|
叶片数量Z |
- |
4 |
|
螺距P/D |
- |
1.00 |
|
100 %转速n |
rev/second |
17.65 |
本文对转子尾迹动力学及其失稳过程进行了大量的研究。近年来的文献从理论和实验两方面对涡流结构动力学特性的各种基础进行了综述(Di Mascio等人,2014;Kumar和Mahesh,2017;Muscaritial.,2017)。然而,大多数与尾流动力学相关的物理理解通常基于开放式螺旋桨,这可能不适用于导管螺旋桨。与开放式螺旋桨不同,导管转子的喷嘴和叶尖之间有一个叶尖间隙。叶尖泄漏流产生一个强烈的叶尖泄漏涡,它将与后缘尾迹和叶片产生的叶尖涡相互作用。与开放式螺旋桨研究相比,导管螺旋桨的研究有点零散,只关注水动力性能,而不关注尾流拓扑结构和涡流结构。关于导管螺旋桨尾流的一些研究综述如下。
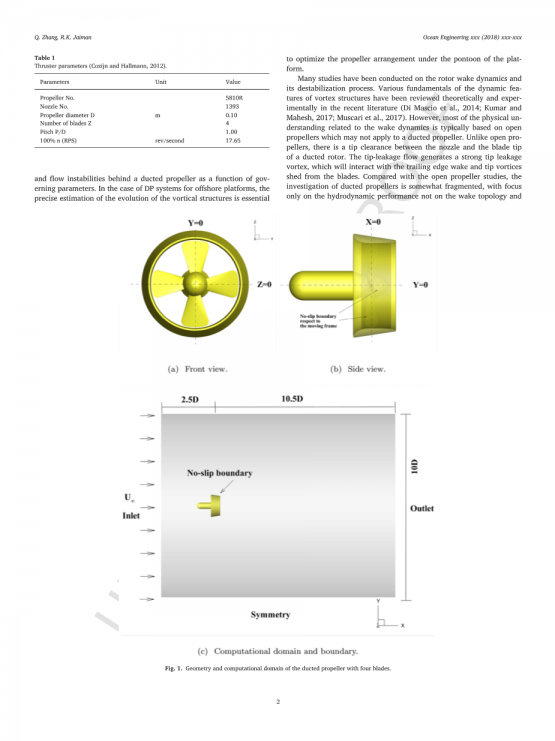
(a)正视图 (b)侧视图
(c)计算域和边界
图1四叶涵道螺旋桨的几何和计算领域
(a)侧视图 (b)正视图
(c)靠近叶尖和喷嘴间隙的闭合网格
图2轴流作用下导管螺旋桨模拟附近的计算网格。间隙中的闭合网格如图2(c)所示
表2网格收敛分析
|
J=0 |
转子 |
定子 |
总网格数 |
精化率 |
Tau;=Tp/Tp Tn |
差异% |
|
|
区域网格 |
区域网格 |
||||||
|
million |
million |
million |
CFD |
EXP |
|||
|
粗 |
0.69 |
5.11 |
5.79 |
0.5128 |
2.64 |
||
|
中 |
1.16 |
12.10 |
13.26 |
1.32 |
0.5292 |
0.5267 |
0.47 |
|
细 |
1.43 |
31.48 |
32.91 |
1.35 |
0.5279 |
0.23 |
|
表3使用GCI的离散化误差估计,j=0.6
|
流速时间平均值,Ux(m/s) |
||||||||
|
1D |
2D |
3D |
4D |
5D |
6D |
7D |
8D |
|
|
细 |
0.405 |
0.710 |
0.826 |
0.852 |
0.936 |
1.048 |
1.154 |
1.207 |
|
中 |
0.415 |
0.724 |
0.797 |
0.862 |
0.952 |
1.067 |
1.182 |
1.201 |
|
粗 |
0.501 |
0.746 |
0.852 |
0.887 |
1.014 |
1.131 |
1.235 |
1.232 |
|
GCI(中) |
3.460 |
5.410 |
9.889 |
2.430 |
2.789 |
3.086 |
6.413 |
0.689 |
|
GCI(细) |
0.417 |
0.710 |
5.088 |
0.979 |
0.723 |
0.918 |
3.519 |
0.122 |
作为一项开创性的研究,Stipa(1932)对航空用管状螺旋桨进行了实验研究,发现与隔离螺旋桨相比,文丘里管的存在提高了螺旋桨的效率。Nienhuis(1992)在一个详细的流动物理观察点上,使用激光多普勒测速(LDV)技术逐点检查了推进器相互作用和尾流速度分布的影响。作者观察到,在推进器的外半径处形成了一个最大速度环,在推进器直径1到2倍后,速度下降到一半,最终在推进器直径4到6倍后,最大速度移动到轴中心线。Oweis和Ceccio(2005)观察到,在导管式海洋推进器的顶部区域,通过平面粒子成像测速(PIV)技术测量的瞬时流场中,一次叶尖泄漏涡与二次后缘涡相互作用。他们还注意到,时间平均流场掩盖了可能留在瞬时流动中的二次涡。船舶推进器在高螺旋桨负载条件下的尾流已经在下游位置通过立体声PIV测量到了1.5推进器螺旋桨直径(El Lababidy等人,2005年)。他们发现,相对较低的速度测量精度是PIV相对于LDV技术的一个主要缺点。为了提高对推进器相关相互作用的理解并提供其计算流体动力学(CFD)分析的基准,Cozijn和Hallmann(2012)进行了一系列物理实验,以测量不同配置的推进器尾流,并进行PIV测量,如开放水域中的单个推进器,板下的推进器,驳船(Cozijn和Hallmann,2012),半潜式和DP钻井船(Cozijn和Hallmann,2014年,2013年)。值得注意的是,本研究还采用了Cozijn和Hallmann(2012)实验中使用的推进器几何结构。总的来说,虽然先进的物理实验技术被用于导管螺旋桨尾流的分析,但由于分辨率和采样频率的限制,尾流动力学,如细尺度涡相互作用和拉伸仍然没有被探测到。
图3粗、中、细网格情况下的水流速度比较
图4导管螺旋桨敞水特性的测量与预测
除了物理实验研究外,在过去二十年中,还考虑了CFD在船舶螺旋桨分析和设计中的应用(Carlton,2012年)。开放式螺旋桨研究所采用的多种模型和方法也扩展到了与导管螺旋桨相关的相互作用效应,大多数研究主要集中在模型的开发和验证上。例如,涡格升力线理论被用来模拟轴对称导管螺旋桨,导管和螺旋桨之间没有间隙(Stubblefield,2008)。采用多参考系(MRF)方法作为准稳态方法,计算了导管螺旋桨的推力、扭矩和效率等总性能量(2014年);Chamanara和Ghassemi(2016年);Razaghian和Ghassemi(2016年)。通过商用求解器(Bhattacharyya等人,2016b;a),用MRF方法研究了尺度效应对导管螺旋桨开水特性的影响。涡格法和磁流变法都能较好地预测推力器的性能,但不能提供准确的尾流场。Bulten等人Bulten和Stoltenkamp(2013)通过商业软件使用滑动界面RAN模拟研究了钻机下的倾斜推进器,发现倾斜推进器装置可以减少与船体和其他推进器装置的交互损失。最近,张等(2018年),已将非FF设计条件下的螺旋桨性能研究为一个开放的泡沫溶剂,并进行了射频稳态模拟和滑动瞬态网格模拟。为了研究涵道螺旋桨的尾迹流动,降低计算资源需求,建立了涵道螺旋桨尾流/射流系统的混合模型。其中一个例子是联合涡格法的建模,以及用于预测推进器有效尾迹和推进器-船体相互作用的非定常流分析的高级商业代码(Kinnasandtian,2015年)。Cozijn(2010)、Maciel(2013)等人探讨了一种
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

