英语原文共 16 页,剩余内容已隐藏,支付完成后下载完整资料
外文翻译
在考虑了道路阻力和相应的功率、能量需求(第二章)和驱动零部件以及相应功率、能量供应(第三章)后,本章将介绍在整车上供应和需求的相互作用。
除了驱动功率和燃油消耗以外,也考虑了不同的驱动布置形式以及摩擦决定的驱动极限,因为它们具有相当大的影响。
4.1驾驶性能
车辆的行驶能力以加速度、爬坡度以及最高车速来表征。这可以通过建立获得发动机功率和对特定的行驶状态所需功率之间的平衡方程来确定。因此,驱动车轮的轮胎花纹就形成了交界面。通常在驱动力或驱动功率图上进行这种比较。
4.1.1功率平衡
牵引力是作用在从动轮的轮胎胎面上的驱动力。 牵引力的关系可以根据轮毂处可用的驱动力矩来确定,也称为轮毂力矩,如下所示:
(4-1)
考虑从发动机到轮毂的传动系中的损耗力矩,轮毂力矩由发动机扭矩确定,公式如下:
的区别被称为净扭矩。净转矩仅与计算目的相关并将轮毂转矩转换为发动机转速。 速度,扭矩,传动比和油温对扭矩损失有重要影响。 对于初始计算目的,假定转矩损失对于特定传动比超速时是恒定的(图4-1)。
为了估计恒定损失转矩的大小,定义了所谓的传动系名义效率系数。 该效率系数描述了额定功率下发动机扭矩的扭矩损失。
(4-3)
(正常功率下的发动机扭矩)
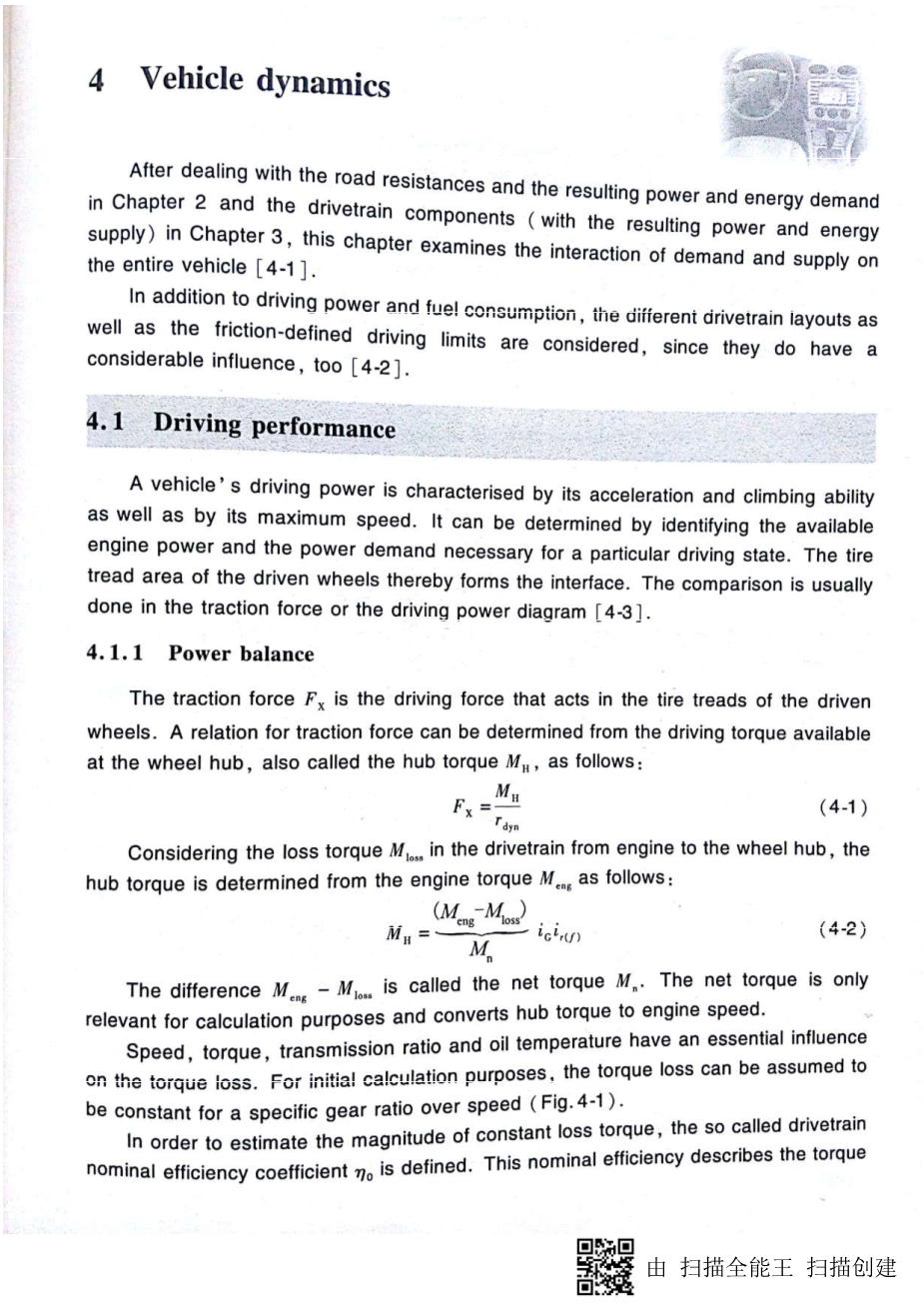
图4-1展示了在不同的输入转矩下,以三档测量的乘用车手动变速器的传动效率。他们可以近似描述为直线。
效率
转数n/(r·min-1)
图4-1 不同输入转矩的传输效率
在这种情况下,效率约为95%,额定转矩为350N·m时,会产生恒定的转矩损失(1 -0.95)times;350N·m = 17.5N·m。
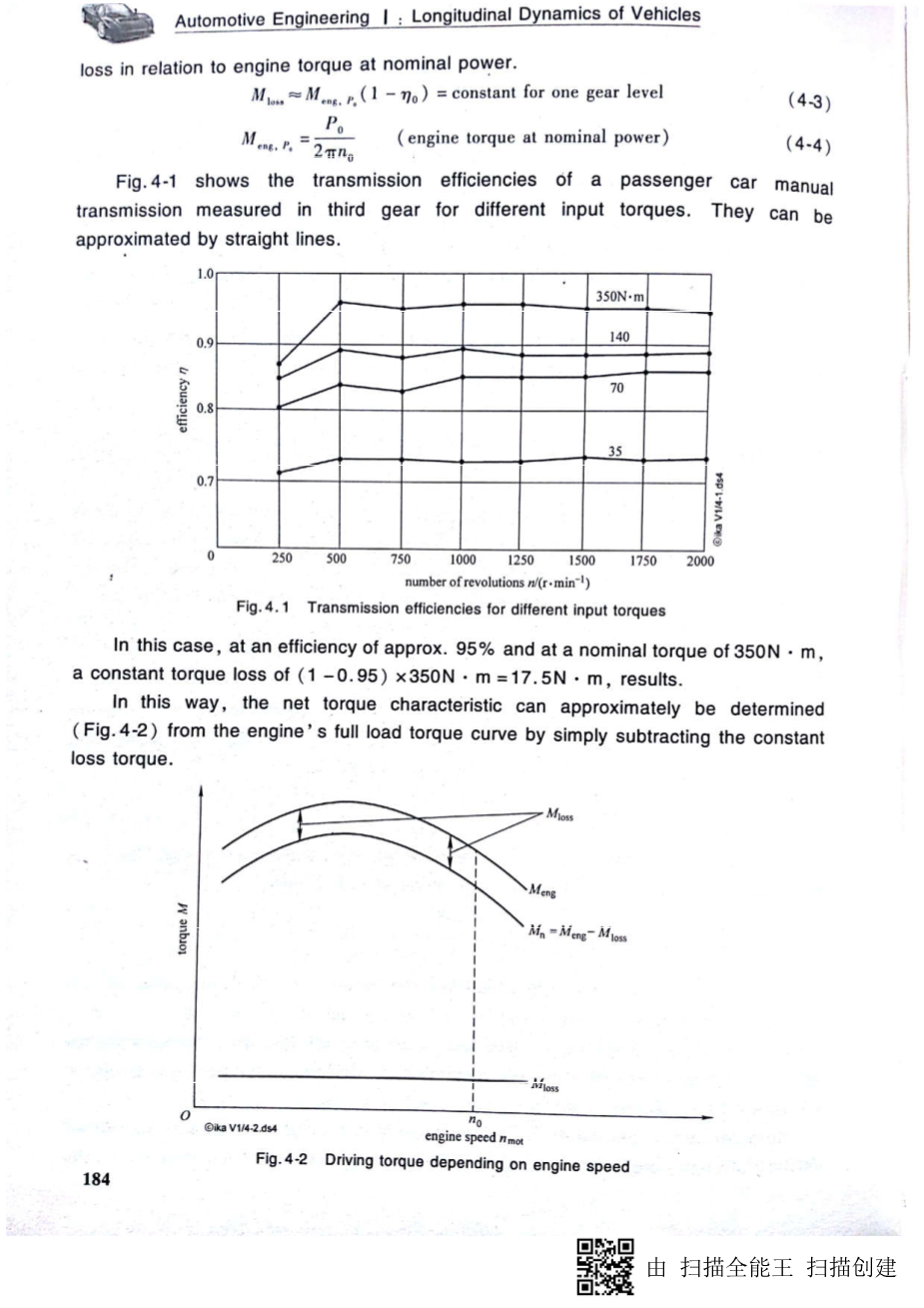
通过这种方式,通过简单地减去恒定损耗转矩,就可以从发动机的满载转矩曲线中近似确定净转矩特性曲线(图4-2)。
发动机转速
扭矩M
图4-2 基于发动机转速的驱动扭矩
使用净转矩M的定义,取决于发动机速度的牵引力,定义如下:
从第3.4节中已经描述的速度 - 速度图(图3-46)可以确定在不同传输级别的全发动机负载下可用的与速度有关的牵引力。
当包括道路阻力时,在一个平面上以恒定的速度,可以得出所需的牵引力图,该牵引力图比较需求和供应。可能的车辆操作点由道路阻力和牵引力曲线的交点表示。此外,最大功率曲线(功率双曲线)也作为行驶速度的函数包含在内。
通过将牵引力供给和牵引力需求与特定的行驶速度相乘,可以如下获得在平面上以恒定速度行驶所需的车轮处可用的轮毂功率和需求功率:
(4-6)
(4-7)
速度V
力F
图4-3 牵引力图
从而得到了牵引力曲线图中的驱动功率曲线图,其中描绘了恒定最大功率曲线,并且还表示出了可在不同齿轮中驱动的满载功率曲线。从驱动功率以及在平面上行驶时的牵引力图,可以确定可用于加速或爬升的最大速度和过度牵引力。
速度v
图4-4 驾驶性能图
4.1.2功率定义的爬坡能力
使用牵引力图,可以将过量牵引力确定为需求力和可用牵引力之间的差值。 图4-5显示了过大的牵引力与行驶速度的关系。
为了在向上的坡度上行驶,需要克服爬坡阻力(参见章节2.3)。 以下内容适用于爬坡阻力:
(4-8)
为梯度的角度
由于以恒定速度行驶是确定功率限定爬坡能力的先决条件,因此通过比较平面内驱动器的供给和需求以恒定速度来确定可用的整个过度牵引力,以克服爬坡阻力。
在规定的速度和档位下,由功率定义的最大爬升能力来自以下关系:
(4-9)
因此,功率定义的爬坡能力与过度牵引力成正比(图4-5)
速度v
速度v
牵引力F
过度牵引力F爬坡能力
图4-5 牵引力图,过度牵引力和爬坡能力
4.1.3功率定义的加速度能力
在最大可能的功率定义的加速度下,加速度阻力被瞬时过量牵引力克服,当考虑平移和旋转加速质量时,结果如下:
(4-10)
(4-11)
——齿轮级i的质量因子
功率定义的加速能力的特性曲线对应于旋转加速时的过量牵引力的特性曲线加速度阻力()被忽略。
就旋转质量而言(egt; 1),由于在降档时质量因子增加,特征虚线表示图4-6中的结果。在商用车辆中,为了即使在最大负载下也能实现较高的爬坡能力,必须以最小的档位实现非常高的比率。在这种情况下,质量因子的值可以如此之高以至于一档的加速能力比二档的小。图4-7显示了这种极端情况下加速能力的特征曲线。为了达到最大加速度,必须在下一个较高档位允许比先前接合档位更大的加速度或达到最大发动机转速时的那些速度下首先换档。由于线性关系,单个传动级的最大加速能力与最大过量牵引力一致。可以注意到,多余的功率的最大值向更高的速度转移,因为:
(4-12)
这意味着对于恒定的加速度,需要与速度成比例的过量功率。加速能力和过剩能量的特性曲线如图4-8所示。
速度v
速度v
过度牵引力F爬坡能力
牵引力
图4-6 牵引力图,过度牵引力和加速能力
功率定义的加速能力和最大爬升能力之间的关系可以确定如下:
(4-13)
(4-14)
通过克服过度的牵引力,我们可以得到:
(4-15)
加速度和爬升能力之间的比例依赖关系,取决于由旋转质量的影响造成的档位[在等式(4-15)考虑],结果如下。
速度v
加速度
图4-7 质量因素对商用车功率定义加速能力的影响
性能P
性能过剩加速度
速度v
速度v
图4-8 驱动功率图,性能过剩和加速能力(e=1)
4.1.4影响或传输布局
除了以发动机图中满载曲线的形状和位置为特征的道路阻力参数和车辆的发动机特性外,变速器的布局或控制策略对驾驶性能具有巨大的影响[ 4-4]。 所需的最大速度通常决定整个传动系统i的最小比率。 如果使用带直接主减速器( = 1)的有级变速器,则必须调整轴比,以便达到所需的最大速度。 另一方面,这对剩余传输级别的比例有影响(另见3.4章节)。 但是,如果规定驱动轴比率(),则所需的最大速度决定了最小的传动比。
如果电源和电源需求处于平衡状态,则达到最大速度。 产生三种可能的布局,如图4-9所示:
1)布局
2)超速布局
3)低速布局
4.1.4.1 布局
动力需求和动力供应之间的平衡在额定速度达到,因此达到最大传输功率。 通过布局,可以实现理论上最大可能的速度,但是在最大速度以下的范围内。 只有相对较小的附加力量才能加速或爬升。
低速布局
布局
超速布局
速度v
性能P
图4-9 传输布局
4.1.4.2超速布局
标称速度在平衡点之前超过。最大速度时的发动机转速大于标称转速。这样,在最大速度范围内可以获得大量的过量功率。然而理论最大速度没有达到。下的发动机转速会导致更多的驾驶噪音和更多磨损。被驱动的发动机工作点通常处于较高燃料消耗的范围内。
普通4档变速器的第四档,5档变速器和5档变速器在乘用车中的大部分设计都基于超速排列。
4.1.4.3低速布局
这种情况下的最高速度是在额定转速之前实现的,这意味着在较低的发动机转速下。理论最大速度没有达到。的确,噪音水平,燃料消耗和磨损较低,但由于过剩的功率比其他两种布局小,所以只有遇到向上的坡度或逆风时,才能达到最大速度,并且急剧下降。
结合超速和欠速布局的优势,可以通过设计基于超速的第四档和第五档作为欠速布局的E齿轮来实现(在5档变速器中)。在这种情况下。 两个齿轮的最大速度可以相同。 一般来说,五档的最高转速比四档的低。 图4-10显示了两种变型中的轮毂功率特性。
速度v
性能P
图4-10 5挡变速器E齿轮的布局
最大速度也可以通过限速器来确定,如图4-11所示,以柴油机为例。
在商用车辆中,道路阻力曲线是由于载重和卸载重量的巨大变化以及由于车辆重量对总道路阻力的巨大影响而分散在很大范围内(图4-12)。因此,与上述情况相对应的最大速度的基本布局是不可能的。后轴布局的选择方式是,在最频繁的驱动速度下,可以实现尽可能好的总效率。在用于长途运输的卡车中,最频繁的速度是法律规定的最高速度80km / h(50mile / h)。图4-12显示了这种卡车的典型布局。
卸载的卡车可以在飞机上加速至约120km / h(75mile / h)。完全加载时,速度约为。轻微低速时可达到105km / h(65mile / h)。直接档位无法应付左侧道路阻力曲线所代表的坡度。但是,使用较小的档位时,可以使用完整的发动机功率,理论最大速度大约为。可达85公里/小时(53英里/小时)。
必须从各个档位的加速和爬坡能力角度来检查总传动布局。过大的牵引力和相应传动比产生的功率必须充分满足驾驶需求。可以通过在牵引力或功率图中绘制爬升或加速的需求曲线以及通过分析特定齿轮中可用的过度牵引力和功率来检查可实现的驱动功率。通过这种方式,可以避免需要经常从驾驶员转换的大间隙。
图4-13显示了不同梯度的需求曲线。
内燃机可以在不同的运行点(部分负载)实现所需的功率。因此,有级变速器中换档点的选择和CVT 中的控制策略对驾驶性能有很大影响。为了实现高驾驶性能,最大过度牵引力是必要的。为此,对于在有级变速器中的最佳加速能力,相应的档位中的过量牵引力的特征的相交点应该表示相邻传输级之间的正确换档点。 由于质量因素,这些交叉点向低速转移(图4-14)。
速度v
速度v
发动机性能
牵引力
图4-13 用不同梯度的需求曲线驱动功率和牵引力曲线图
a) 牵引力(驾驶状态)
b)驾驶表现(特征引擎)
关于最大爬坡能力的最佳换档点以恒定速度,位于过量牵引力特征的交点处。 因此,它们位于功率曲线的交点内,与质量因子无关。 与有级变速箱相比,无级变速箱提供了根据规定的动力需求自由选择发动机工作点的可能性。 采用相应的控制策略,发动机可以在最大功率输出点持续运行。 该车具有最佳的爬升和加速能力。
加速度a
速度v
图4-14 质量因素对最佳换档点的影响
4.1.5总制动力和制动潜能
当车辆破裂时,瞬时加速度为负值。为了定量表示刹车的内阻,减速度z。它是指减速度a与重力加速度g之比被引入:
(4-16)
考虑到道路阻力和在发动机耦合的情况下作用在车辆上的所有力的总和,使车辆减速的总制动力由:
(4-17)
所需要的车轮制动力依次达到减速,结果如下:
) (4-18)
从图4-15定性描述,可以注意到,在下坡坡度上,与在平面上行驶相比,较小的牵引力需求是由于力F作用在负斜坡的方向上,即在驾驶方向。由于下坡坡度的原因,为了保持恒定的行驶速度,必须在较低的平均速度范围内产生制动力。在重型商用车辆的情况下,连续行车制动器用于在下坡行驶时制动。他们的特点,在这种情况下,发动机制动和电动减速器,也包括在图中。如果连续行车制动器的制动力的大小大于合力要求,则实现稳定的行驶条件。
不稳定
不稳定
稳定
稳定
速度v
力F
图4-15 采用发动机制动器和电子减速器降级驾驶条件稳定
图4.15中的稳定范围是指专门使用电动减速器的行驶状态。 在法律规定的最大速度的范围内,电动减速器可以获得比发动机制动器更高的恒定速度。 但是,在较低的转速范围内,只能使用发动机制动才能达到稳定状态。
4.2燃油消耗
为了实现规定的行驶性能,必须向动力装置供应能量。液体燃料形成了在几乎所有现代车辆中采用的内燃机能源。车
全文共6298字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[9897],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

