
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
由机械连接的双平行滚珠丝杠驱动的单轴平台的建模与同步控制
摘要:这篇论文介绍了一种针对由双平行滚珠丝杠/伺服电机驱动的单轴平台的同步控制方法和系统建模技术。两个滚珠丝杠的滑台由一根铝条连接起来,铝条的两端分别牢固地固定在一个滑台上。推力因此可以由这个连接结构共同输出。这样的安排旨在解决工作台在两条直线导轨之间具有较大跨度的大型机床上潜在的歪斜问题。这样的布局设计还可以提高大型龙门机床的动力学特性,速度和精度。然而两个耦合的平行滚珠丝杠副的具体同步方法是目前需要应对的主要挑战。因此,在本论文中第一次提出了一种用于构建耦合系统的数学模型的系统识别技术,这种技术经实验证明能有效提升建模表现。之后三种同步控制方法被用于对系统的控制。通过实验,从定位精度,跟踪精度和对两个滚珠丝杠副之间的同步误差的减少三个方面对三种同步控制方法的表现进行比较。最后根据试验结果选定合适的控制方法。
关键词:同步控制 滚珠丝杠 系统识别 耦合模型
1 介绍
由滚珠丝杠驱动的平台在工业的运动控制领域广泛使用,例如各式机床以及定位台。一种常见的向机器提供驱动力的结构如图1所示,在这种结构中,平台沿着两条直线导轨滑动,并由一台伺服电机带动一个滚珠丝杠进行驱动。对于小尺寸的平台,这种结构已经足够精准,能达到令人满意的精度。然而机床的能力在不断加强,不仅仅要求精度,同时也要求能被机械加工的零件尺寸。在后一种情况中要求有大尺寸的滚珠丝杠驱动的平台,这也导致在平台的两条直线导轨之间存在很大的跨度。由于两条导轨之间的大跨度而导致的平台的歪斜问题可能使结构的精度下降。
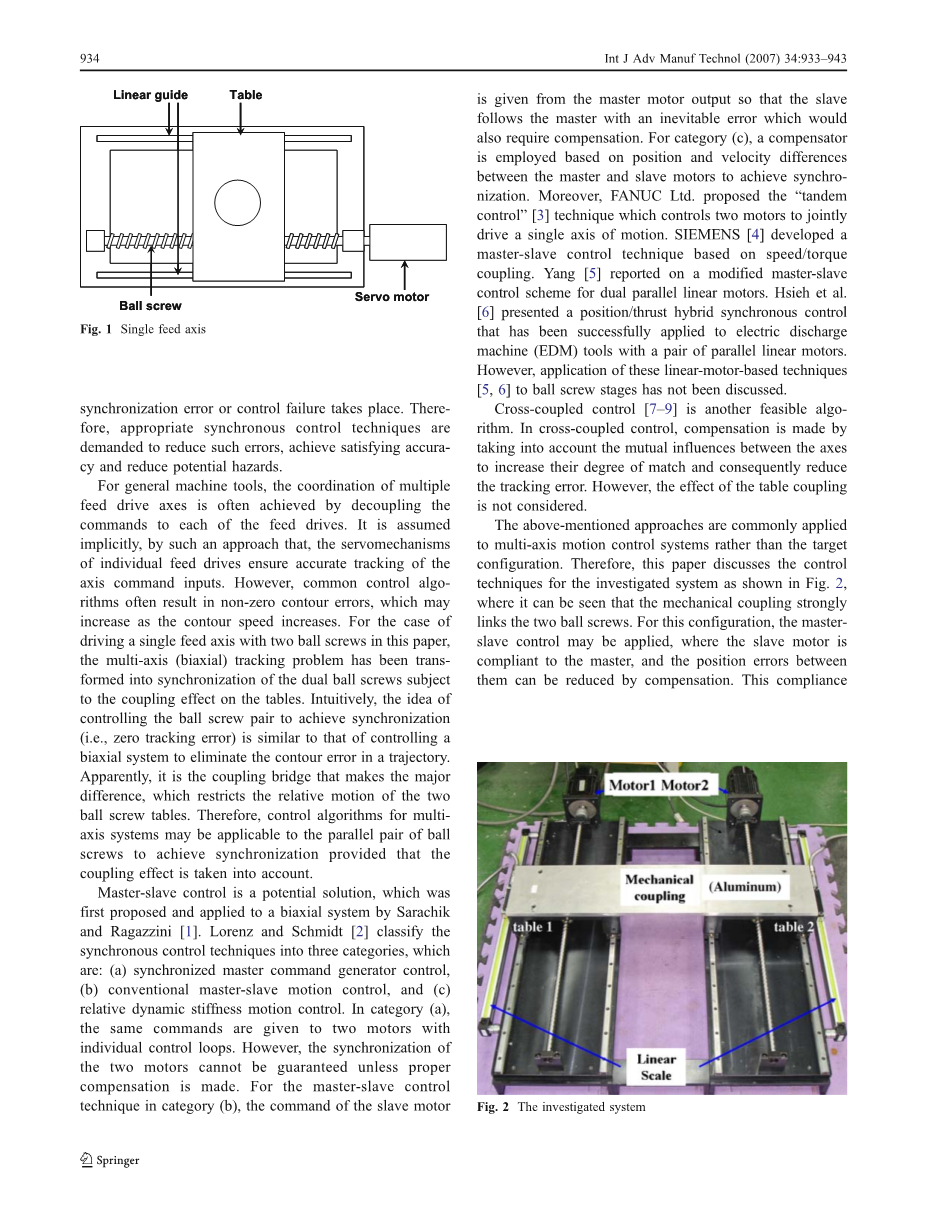
基于以上讨论,一种由两组滚珠丝杠/电机组成的大型单传动轴来驱动平台的方案是更合理有效的。在这个方案中,两组滚珠丝你杠/电机相互平行布置并在相同方向上共同提供推力,如图2所示。这样可以显著地提高系统的牢固性和驱动平台的总推力。尽管这样的布局具有潜在的优点,但是它也存在一些需要进一步考虑的地方。第一,由于这一对滚珠丝杠之间的连接限制,它们之间的同步控制水平变得至关重要。这意味着精确控制的需要,因为对这种结构的控制不仅仅需要达到令人满意的位置精度,还需要消除两组平行的滚珠丝杠之间的同步误差。第二出了性能要求之外,安全也是一个需要考虑的重要因素,因为破坏可能在出现明显的同步误差或控制故障时发生。因此我们需要适当的同步控制技术来达到需要的精度并减少潜在的危害。
图1 单进给轴
对于一般机床,多根进给驱动轴之间的协同通常是靠将每一个进给驱动要求解耦合来完成的。它被假定为绝对的,在这种方法中,每一根独立轴的伺服系统确保对这根轴的输入要求的精确跟踪。然而,一般的控制算法常常会产生非零的控制误差,这种误差会随着速度的上升而加大。对于本论文中用两组滚珠丝杠驱动一根进给轴的方案,多轴(双轴)跟踪问题变成了对共同影响平台的双滚珠丝杠的同步问题可以很直观地看出,控制两组滚珠丝杠以达到同步(换言之,实现零跟踪误差)的思路与控制双轴系统以消除轨迹误差的思路十分相似。很明显,是限制了两个滚珠丝杠平台之间相对运动的连桥造成了主要的不同。因此,在考虑连接造成的影响的情况下,多轴系统的控制算法可能也适用于平行双滚珠丝杆结构。
由Sarachik和Ragazzini首先提出并应用的主从控制是一种可能的解决方案[1]。Lorenz和Schmidt将同步控制方法分为三大类[2],他们是:(a)并联控制,(b)主从控制和(c)相对运动刚度控制。在分类(a)中,相同的命令会下发给两个具有独立控制循环的电机。但是,除非给予电机合适的补偿,否则很难保证两个电机之间的同步。对于(b)分类中的主从控制技术,主轴的输出信号会成为从轴的控制信号,所以从轴在跟随主轴的时候会不可避免地存在误差,这也需要给予补偿。对于分类(c),在主从轴之间有一个以位置和电压信号的不同为基础的补偿器,从而使主从轴达到同步。除此之外,发那科股份有限公司提出了控制两个电机共同驱动单一轴的“串联技术”[3],西门子公司开发了基于速度/扭矩耦合的主从控制技术[4]。Yang提出了一种针对双平行直线电机的改良的主从控制方案[5]。Hsieh el al.提出的位置/推力混合同步控制已经成功应用于有一对平行直线电机结构的电加工机床[6]。然而这些基于直线电机的技术在滚珠丝杠结构中的应用还没有被讨论[5,6]。
交叉耦合控制[7-9]是另一种可行的算法。在交叉耦合控制中,补偿时通过考虑两根轴之间的相互影响来完成的,通过这样的补偿来提高它们的匹配程度,从而降低追踪误差。然而平台的机械连接对系统的影响并没有被考虑到。上述方法一般应用于多轴运动控制系统,而不是目标配置。因此,本文讨论了如图2所示的研究系统的控制技术,在这个装置中我们可以看到机械耦合牢固地连接着两个滚珠丝杠。对于这种结构,可以使用主从控制方案,从电机跟随主电机,可以通过补偿减少它们之间的位置误差。相比于直接将控制信息下达给两个电机的方案,这种从轴服从主轴的方法也可以防止潜在的危险的发生。在这篇论文中,主从控制分为两种形式,即速度服从和推力服从。值得注意的是,这里并没有考虑对非线性特性如摩擦力和反弹力的补偿,所以可以将同步控制策略和系统识别放在一起考虑。在这里说明,这里的“同步误差”定义为两平行直线电机之间的位置不同,相反地,在接下来的内容中使用的“跟踪误差”定义为实际位置与预期位置之间的误差。实验通过一台数字信号处理器进行(DSP)。
对于系统模型,由于两个滚珠丝杠是机械耦合的,在进行系统识别的时候我们应该将耦合影响考虑进去。Yang等人[10]提出了一种用于具有机械耦合结构的双直线电机的同步控制技术,为了现在的研究,提出了一种确定耦合的双滚珠丝杠的系统模型的识别技术。
这篇论文将作如下安排。在2部分,对研究的系统进行了描述,并推导出平行滚珠丝杠系统的数学模型。第三部分讨论同步控制方案的设计。实验研究将在4部分呈现,之后的5部分将对论文进行简要的总结。
2 系统建模
如图2所示,使用的丝杠拥有10mm的螺距和明显的5mu;m背隙。两个分辨率为1mu;m的线性尺用于测量两边平台的位置。一条横跨两个滚珠丝杠平台的铝条作为机械耦合装置。为了方便,每一个滚珠丝杠和驱动它的电机共同被称作一个“子系统”,因此可以用“子系统1”和“子系统2”来区分两个单元。每一个滚珠丝杠有一个滑台,相似地,它们被称作“滑台1”和“滑台2”。后文中的“平台”一词将用于指代整个系统,包括两个滚珠丝杠/电机单元,线性尺和机械耦合装置。下面将讨论系统的建模。
图2.被研究系统
做了大量滚珠丝杠的控制实验,着重于他们的动力学建模和非线性补偿,从而实现高位置精度[11-13]。对滚珠丝杠及伺服电机平台的模型进行了轻微调整,使其着重于驱动滑台的推力。忽略摩擦力影响(不考虑非线性因素)的模型如图3所示。可以据此推出如下系统方程。
其中J为电机和丝杠的总转动惯量,T为电机转矩,K为滚珠丝杠的等效刚度,P为滚珠丝杠的螺距,M为滑台的滑动质量。同样,在图3 (a)中,f是由于电机转动而产生的滚珠丝杠所产生的摩擦力。theta;,omega;,alpha;和x,v,a分别代表旋转运动和直线运动的位移,速度和加速度。
根据以上讨论,我们可以用图3(b)的框图描述这个滚珠丝杠平台,并将它分成三部分:电机,滚珠丝杠和滑台。虽然基于但滚珠丝杠来建立研究系统的模型,但应该仔细考虑两盒滚珠丝杠之间相互的耦合影响。
2.1耦合系统建模
在耦合系统的每一个滚珠丝杠中,驱动滑台的推力都有两个来源,一部分来自自己的滚珠丝杠,另一部分通过耦合从系统的另一侧传来。因此可以将叠加原理应用在系统的构建中:在不考虑非线性的情况下可以将两种类型的推力直接叠加。
在图3(b)所示的单轴单元中,“滑台”是两个滚珠丝杠在该模型应用于所研究的系统时通过耦合作用的部分。由于两个电动机共同驱动相同的平台,所以应该将耦合系统视为一个单元。图4解释了两个滚珠丝杠之间的关系。可以看到,T1是电机1的转矩指令,T2是电机2的 。f11和f22定义了两个子系统在各自的滑动表上的直接推力(即:f11表示子系统1作用于滑台1的推力),v1和v2分别表示子系统1和2的速度输出。耦合效应由f21和f12定义,f21通过耦合从子系统1传递作用于滑台2的推力。同样,对于f12,推力通过耦合从子系统2传递。
为了简化,可以用以下方程描述系统:
式中x11表示子系统1中转矩输入与速度输出之间的传递函数,x22表示子系统2中的函数。X12是子系统2的转矩输入对子系统1数度输出的传递函数,x21相反,是子系统1与子系统2之间的函数。
图3.单轴滚珠丝杠平台 (a)模型 (b)框图
图4.耦合系统的框图
为了建立系统模型,提出了图5所示的系统识别方法。对于图5(a)所示的测量试验(i),子系统1被给予转矩指令T1,通过测量滑台1的速度输出,可以获得传递函数x11,同时还能测量滑台2的速度输出,因此传递函数x22也可以确定。对于x22和x12,测量过程是一样的,只是像图5(b)所示将转矩命令T2下达给子系统2。一台动态信号分析仪(Agilent 35670A)用于测量所需的传递函数。
图5.系统识别的测量过程
为了完成测量过程,应该只开启一台电机而令另外一台保持停止。但是对于滚珠丝杠,如果没有电机驱动,滑台是很难移动的,所以不需要激励就能移动的直线电机更适合这样的实验[5,6]。为了克服这个问题,提出了一个针对耦合系统的闭环识别技术,如图6所示。在识别之前,给电机和滚珠丝杠一个恒定频率的正弦速度指令,这主要是为了以相同的低频率启动两个电机,从而被动滚珠丝杠的滑台可以比较容易地被驱动电机拖动,从而完成测量。图6所示的速度PI控制器是为了使系统稳定而设计的。 将速度信号转化成对应的电压信号的速度控制器和速度检测器是由一个数字信号处理器实现的。在以指定的低频率启动两个电机和滚珠丝杠之后,动态信号分析仪的源通道会产生一个扫频的正弦信号并将它送给其中一个处于转矩模式的电机。这个扫频正弦信号将通过数模转换器与低频指令叠加,结果信号将被反馈回分析仪的一个通道。两个滚珠丝杠的速度输出也经过线性编码器反馈回另一个通道。值得注意的是,在识别时,同一时间只有一个电机是运作的,但两个线性尺的速度电压都需要被测量。这会使每个方向上的耦合影响都能被测定。最后,传递函数可以通过频率响应分析和曲线拟合来获得。
通过上文讨论的过程,可以得到如图7所示x11,x22,x12和x21的bode图和如下四个传递函数:
图6.闭环系统识别
2.2无耦合模型
为了突出提出的建模技术的优点,需要做实验来比较它对考虑和不考虑耦合影响的两种模型的建模表现。为了实现这一目的,两个子系统将在解耦合的情况下被分别识别,因此每一个模型都表现一个独立子系统的特征。系统可以被以下公式描述:
两个独立系统被测得的传递函数如下所示:
系统可以利用图4中的f12和f21来说明。然而传递函数x*11和x*22由于识程的不同,和x11,x22并不相同。
值得注意的是,在进行控制试验研究时,铝制连接器在两个模型中都存在。在下文中“耦合模型”包含耦合影响,如图4所示。“解耦模型”表示两个子系统分别识别。
图7.x11,x12,x21,x22的bode图
3 控制设计
3.1 速度环
在这里将介绍利用PID控制器的单轴闭环控制系统[14,15]。对于图8所示的速度环,应用了伪导数反馈前馈(PDFF)控制算法。与普通的IP或PI控制相比,这里增加了一个等效的前馈,增加了控制系统的自由度[14,15]。
图8.位置环控制器
由图8,速度环的传递函数如下:
将传递函数变换为标准的二阶型式如下:
将式(12)中的s换成jomega;BW:
其中omega;BW代表了系统的带宽。因此:
对于速度前馈KfV,在一个由Kollmorgen给出的PDFF设计的常规算法中[14],为了系统的高刚度,要求KfVgt;0.4,为了快速响应,要求KfVgt;0.9。KP,KI和KfV将在实验中给出。
3.2 位置环
在位置环中,假设速度环的带宽足够高于位置环的带宽,图8所示的提前设计好的速度环可以作为一个单元来将位置环的阶型减少至一阶,对于一个比例(P)控制器,传递函数如下:
一阶系统的带宽等于时间常数1/CP,通过给定闭环的带宽,可以确定位置环控制器的比例增益[15]。
图8所示的位置环的前馈(KfP)是用来提高跟踪性能的。带前馈的位置环传递函数为:
其中和x分别是输入和输出,KfP是前馈增益。理论上来讲,KfP=会令=x,换言之,式(18)会等于一。然而实际上KfP的值会随着实验条件而改变。
3.3 同步补偿
两个子系统之间的同步误差可以通过增加一个补偿器k1来改善,如图9(a)所示。为了确定比例增益k1的值,首先将它转化为图9(b)所示的等效图。为了方便推导,用和来表示x11和x
全文共9593字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[9619],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

