
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
CATIA-LMS六轴加工机器人轨迹规划的动态仿真
易罗1,奥利维尔·吉巴鲁2,阿德尔·奥拉比3
1制造工程与自动化学院,北京,北京,100191
2,3计量和应用数学实验室(L2MA),Ensam,Lille,法国
@sina.com,2,3 olivier.gibaru@ensam.eu
摘要。目前六轴加工机器人在工业领域得到了广泛的应用。与机床相比,工业机器人提供了一种比机床更便宜、更灵活的选择。铝铸件的清洗及预加工应用。但是由于刚度低,使得工业机器人在加工精度要求很低的加工任务中的应用受到了限制。本文提出了一种通过开发离线仿真工具来提高机器人加工精度的实用方法。首先,我们将完成六轴刚性模型的动态仿真。在CATIA-LMS中用于轨迹规划。其次,在LMS中为工业加工机器人设置柔性关节和平衡系统。最后,我们将与位置轨迹做一些比较。由柔性关节和刚性节点生成,在工业加工前,根据仿真结果调整参数。
关键词:机器人加工,动态仿真,轨迹规划,柔性关节
介绍
在过去的半个世纪里,工业加工机器人被用来完成许多工业任务,如材料处理、焊接和喷漆。与传统机床相比,工业机床机器人更便宜,更灵活,更重要的工作空间[1]。
虽然这些工业机器人可以进行加工应用,如铣削、清洗、铸造零件的预加工以及中间公差零件的端部加工。但是,这种应用程序需要高精度定位和路径跟踪和六轴工业机器人被设计来实现可重复的任务。所以他们是中继器,但不是准确的。由于对IR系列结构,六轴机器人的刚度比传统机床低[2].。工业机器人的刚度通常小于1N/mm,而机床的刚度往往小于1N/mm。n大于50 N/mm[3]。因此,我们需要开发一个离线仿真工具,实现CATIA-lms中六轴机器人模型的动态仿真,实现轨迹规划,并创造出柔性的机器人模型。关节的变形看每个关节的变形作用下的变形-扭矩.
典型机器人机械手刚度的来源是其关节、执行机构和其他传动元件的柔顺性、连杆、基座和a的几何和材料特性。其位置控制系统提供的刚度[4]。为了本研究的目的,我们假设:1)执行器和传动元件的柔顺性是刚性的主要来源。性,它可以由一个扭转弹簧各关节[ 5 ];2)由于机器人位置控制系统由原始设备制造商提供了作动器的主动性D虽然积分控制器可以根据定位误差增加主动柔顺性,但系统的OES不随时间变化;3)链路的刚度是无穷大的。
该模型的目的是对加工机器人的性能进行仿真和优化。首先,在CATIA-LMS中建立一个刚性模型.。第二,运动驱动程序将被添加到此模式中。控制机械的运动。第三,通过在节点上加入柔性元素,建立了一个柔性模型。最后,我们将比较机器人轨迹与柔性和刚性模型。展示这种灵活性的效果,优化我们的工业加工。
轨迹规划的动态仿真理论与策略
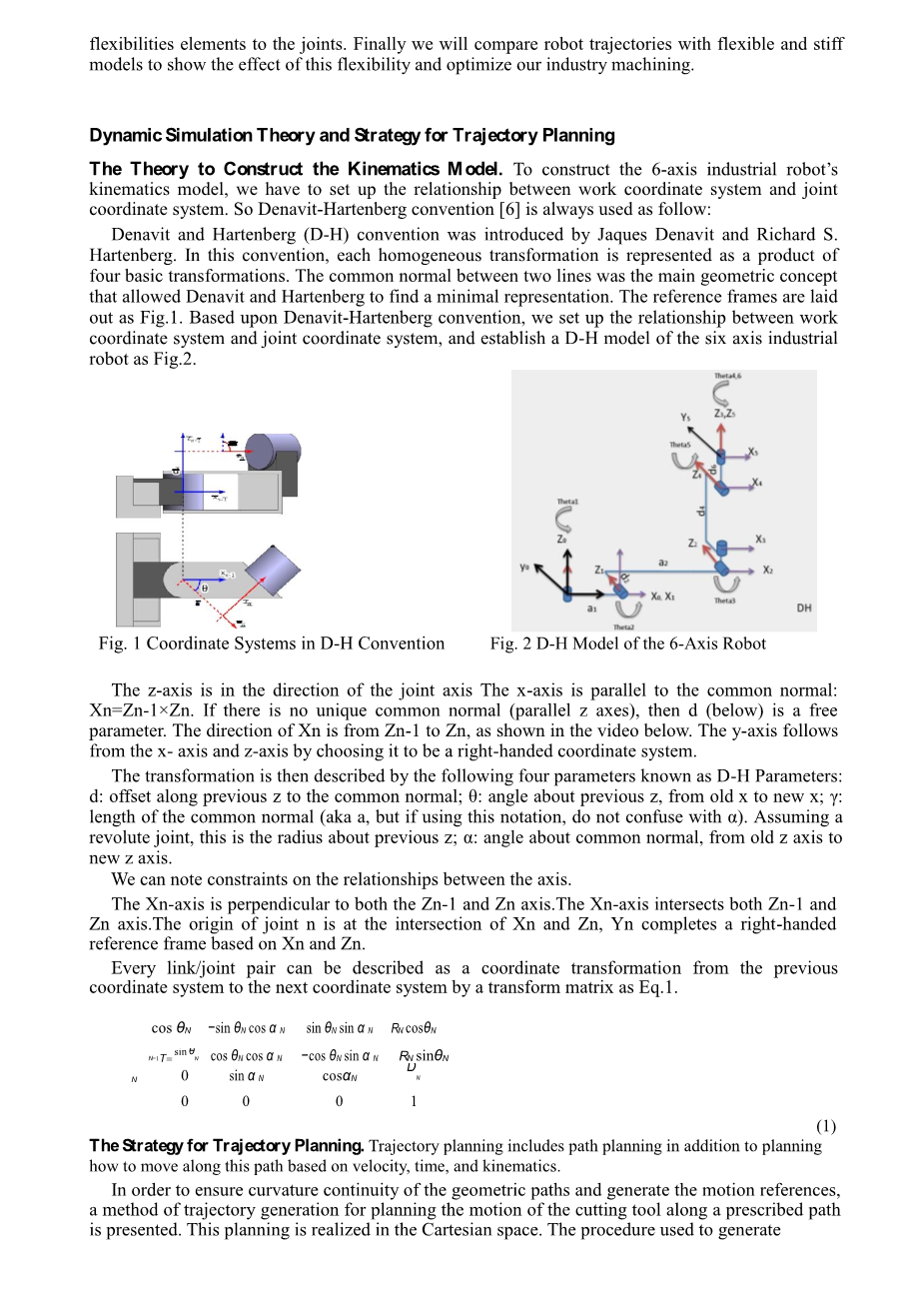
建立运动学模型的理论。为了建立六轴工业机器人的运动学模型,必须建立工作坐标系与关节坐标系的关系。...。因此,德纳维特-哈滕贝格公约[6]通常用于:
Denavit和Hartenberg(D-H)公约是由Jaques Denavit和Richard S.Hartenberg提出的。在这个约定中,每个齐次变换都表示为四个基本转换的乘积。枕木。这两条线之间的共同法线是一个主要的几何概念,使Denavit和Hartenberg能够找到一个最小的表示。参考框架如图1所示。基于在Denavit-Hartenberg会议上,建立了工作坐标系与关节坐标系的关系,建立了六轴工业机器人D-H模型。
1 D-H公约图中的坐标系统。 六轴机器人的二维-H模型
z轴位于关节轴的方向,x轴与普通法线平行:Xn=Zn-1times;Zn。如果没有唯一的公共法线(平行z轴),那么d(下面)是一个自由参数。大Xn的方向是从Zn-1到Zn,如下面的视频所示。y轴从x轴和z轴开始,选择它为一个右手坐标系。
然后,用以下四个参数来描述这个变换:d:沿前一z偏移到公共法线;theta;:关于前一z的角度,从旧x到新x;gamma;:Lengt。h的一般法线(也就是a,但如果使用这种表示法,不要混淆alpha;)。假设一个旋转关节,这是以前z的半径;alpha;:从旧z轴到新z轴的共同法线角度。
我们可以注意到轴之间关系的约束。
Xn-轴与Zn-1和Zn轴垂直,Xn轴与Zn-1和Zn轴相交,关节n起源于xn和Zn的交点处,Yn完成了一个右手参考点。基于Xn和Zn的框架。
通过作为Eq.1的变换矩阵,可以将每个链路/连接对描述为从前一个坐标系到下一个坐标系的坐标转换。
|
cos theta;N |
minus;sin theta;N cos alpha; N |
sin theta;N sin alpha; N |
RN costheta;N |
||||
|
Nminus;1T sin theta;N |
cos theta;N cos alpha; N |
minus;cos theta;N sin alpha; N |
RN sintheta;N |
||||
|
N |
0 |
sin alpha; N |
cosalpha;N |
DN |
|||
|
0 |
0 |
0 |
1 |
||||
- 轨迹规划战略。轨迹规划除了包括基于速度、时间和运动学的路径规划外,还包括路径规划。为了保证几何轨迹的曲率连续性和生成运动基准,提出了一种轨迹生成方法,用于规划刀具在指定路径上的运动。介绍了。这一规划是在笛卡尔空间中实现的。用于生成运动命令如下[7]。首先,利用平滑的进给速度曲线规划刀具在参数曲线上的运动。其次,参数内插器生成POSI。在每个取样时间,刀具(末端执行器)的安装.。第三,利用逆运动学模型[8]将采样的笛卡尔位置转换为联合坐标命令。第四用速度、加速度和加速度上界表示的关节运动学约束进行了校核,并在必要时采用了进给速度。最后,联合空间轨迹是为CATIA-LMS中六轴机器人模型的动态仿真提供了参考.
刚性机器人轨迹规划模型的动态仿真
为了更好地研究六轴加工机器人的性能,我们利用实心机器人上的实测值来确定机器人的真实参数。在CATIA中对六轴机器人进行了建模,将CATProductDocument导入LMS,并通过生成CATAnalysis文档为动态仿真做准备。
为每个联合空间生成革命关节。旋转关节允许两个物体围绕一个公共轴旋转,所有其他自由度都受到约束,就像我们的机器人关节一样。因此,我们用旋转关节定义机器人的每个关节,包括选择一个轴和一个平面。
选定的轴将变成共线,选定的平面将成为共面的。因此,联合原点将存在于轴和平面的交点处。后面的部分是驴拥抱后,你就可以围绕着公轴旋转了。
当定义旋转关节时,调整各关节的坐标系方向,使机器人的初始位置随需要而变化。
给关节位置驱动器输入时间序列。关节位置司机允许我们驾驶一定程度的关节自由度。因此,关节所涉及的主体的相对位置被驱赶了。一旦选择了一个连接,只有类型的有效选项才可用。在这里,我们选择函数作为时间序列输入。
通过参数插值,在每次采样时生成末端执行器的位置,并利用matlab中的逆运动学模型将其转换为关节坐标系。.
最后,每个关节的空间轨迹可用MATLAB生成的时间序列输入文件(.asc文件)描述。在采样时间为0.004s的情况下,我们还选择了Delta时间。作为0.004。
以对数螺旋为指定轨迹,生成6个关节位置驱动器的6个时间序列输入文件,实现了刚性机器人模型的动态仿真。
LMS加工机器人柔性关节设置及平衡系统
在LMS中通过RSDA定义柔性接头。六轴加工机器人刚度低,限制了其任务的应用,精度要求很低。所以我们需要创建灵活的E关节,而不是僵硬的关节,以看到真正的运动。在LMS中,我们可以在相对标准偏差窗口中设置适合我们需要的弹簧常数、阻尼系数和执行机构扭矩参数。a(缩写为旋转关节的弹簧恒定阻尼系数执行机构扭矩)。我们可以输入参数的值,使用现有参数中的公式,或者使用表达式来定义刚性。阻尼或执行器值。
在Joint 2中设置平衡系统的可变扭矩。考虑到连接件2的平衡系统,接头2中的扭矩是由连接件转动过程中弹簧的作用产生的。结论,我们得到的公式(水利对eq.6)计算驱动力矩:
|
A R |
2 sin 2 alpha; ( L R (1 minus; cos alpha; ))2 |
|
(2) |
|
B R sinalpha; |
(3) |
|||
|
X A minus; L |
(4) |
|||
|
F K X P |
(5) |
|||
|
T F ( R L ) B / A |
(6) |
|||
|
K 129478,000N/m |
r=0,080m |
L=0,805m |
P=17900,000N |
这四个基本参数的值如下:
执行器扭矩随连接角的变化而变化。因此,我们需要使用带有表达式的时间矩函数来输入变量值。当我们用时间矩函数的输入扭矩在joint2变量的值,我们需要一个表达式返回在每个采样时间的扭矩的单值。所以我们应该建立一个表达式T=F*(gamma;L)*B/A表示接头的扭矩。
表达式元素是返回单个值的数学公式。表达式可以由标准通用函数组成,也可以包括传感器函数。传感器功能使测量在机械系统工作。它们与 、、、、和*运算符一起用于构建表达式元素,它们的值可以被绘制。
比较柔性和刚性模型的位置轨迹。考虑到在LMS中,在同一旋转关节上的关节位置驱动器和RSDA不能一起工作,我们无法看到机器人的仿真。或在柔性关节作用下的特定轨迹。因此,我们有了一个改进模型的想法,我们可以在旧的关节之间增加一部分。例如,我们可以在axis 1和ax中添加第2部分。如图3所示。然后,我们在轴1和第2部分之间建立了一个称为joint 21的旋转关节,并在
全文共5485字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[9520],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

