英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
Hindawi出版
国际航空航天工程杂志
卷2017年,文章ID 3202318,8页
研究文章
变量的刚度计算与优化
刚度负载转矩仿真系统
Zhe ji,姚晓瑶和左宝亮
北京理工大学航空航天工程学院,北京100081
信件应该寄给左宝亮;
2017年7月2日收到; 2017年10月16日修订; 2017年10月23日接受; 2017年12月5日发布;
学术编辑:Mahmut Reyhanoglu
本文提出了一种用于变刚度负载转矩模拟系统的新颖设计。该系统应用于负载转矩开启
一个实时硬件在环系统(HILS)中的方向舵。与传统的装载方法相比,其中不可避免的存在额外的扭矩,变刚度加载系统采用“先分解然后耦合”的方法输出负载转矩并显着降低附加转矩。基于从风洞试验获得的实验数据,提出了一种计算方法来确定变刚度加载系统的加载参数。由于负载刚度与各种因素有关,从风洞试验数据中获得的刚度值,如固定的马赫数和
舵偏转角,都不是确定的数值。通过分析加载参数的影响因素,建立了一套最佳的加载参数
使用优化算法获得负载刚度,并且实现对负载转矩的精确跟踪。以舵机负载转矩使用的计算方法为例,转矩跟踪误差小于0.05 Nm。该仿真结果表明所提出的变刚度加载计算方法是有效的。
1.介绍
铰接力矩是指由作用在飞机表面的空气动力产生的扭矩 [1-3]。一种方向舵负载转矩模拟系统,被用来模拟飞机飞行过程中的铰接力矩并评估舵的实际工作负荷,通过执行飞行模拟和性能测试在负载条件下的飞机[4]。根据不同的负载执行器,装载系统可以分为机械装载系统,液压加载系统和电动加载系统[5,6]。机械装载系统主要使用重量,惯性板和扭杆弹簧作为加载介质。这种类型的加载系统结构简单,刚度固定,可靠,并且不需要任何额外的功率;但是,它不能跟踪持续变化的负载。电动液压装载系统使用液压马达或液压缸作为执行器并具有响应速度快,卓越的动态性能和高精度的优点,蛋同时具有功耗大,噪音大,低能源利用率和需要额外的扭矩的缺点[7,8]。该传统的电动加载系统使用力矩电机,
具有很强的小信号跟踪能力,性能稳定并且小尺寸。 但是,这种类型的系统视转矩作为控制变量[9-11]并且必须追踪扭矩时的方位指令。 因此,附加扭矩的存在是不可避免[12-14]。
可变刚度加载模式使用扭力杆,把弹簧作为加载介质并通过改变刚度调整扭杆弹簧的工作长度。由于扭杆弹簧的实际负载和导弹飞行期间方向舵的实际载荷是有弹性的负载,这种加载模式可以更好地模拟实际舵的负载。 负载模式采用“先分解后耦合”的方式。 采用这种方法,能实现更好的动态加载精度。 而且,这个方法是一种间接加载扭矩的方法,这对刚度加载模拟器计算模拟数据获得负载参数并用两个装载部件输出转矩提出了技术挑战。本文提供了一个计算加载参数的方法; 这种方法与从风洞试验获得的现有数据结合在一起,并且通过使用一台仿真电脑获得一个硬件在环系统(HILS)。
优化方法是一种检查如何在给定约束条件和一定的指标下找到某些因素以达到最佳效果的数学方法。谢弗[15]提出使用遗传算法来解决客观优化的问题。 拉马蒂等人[16]设计了一种非线性客观优化方法来提高橡胶的被动控制性能以最大限度地减少冲击和随机的破坏性影响。 通过分析初始负载作用于加载效应的刚度的影响,使得加载参数必须进行优化以获得最佳的工作结果。
- 可变刚度加载系统的基本原理
2.1 可变刚度加载系统的组成
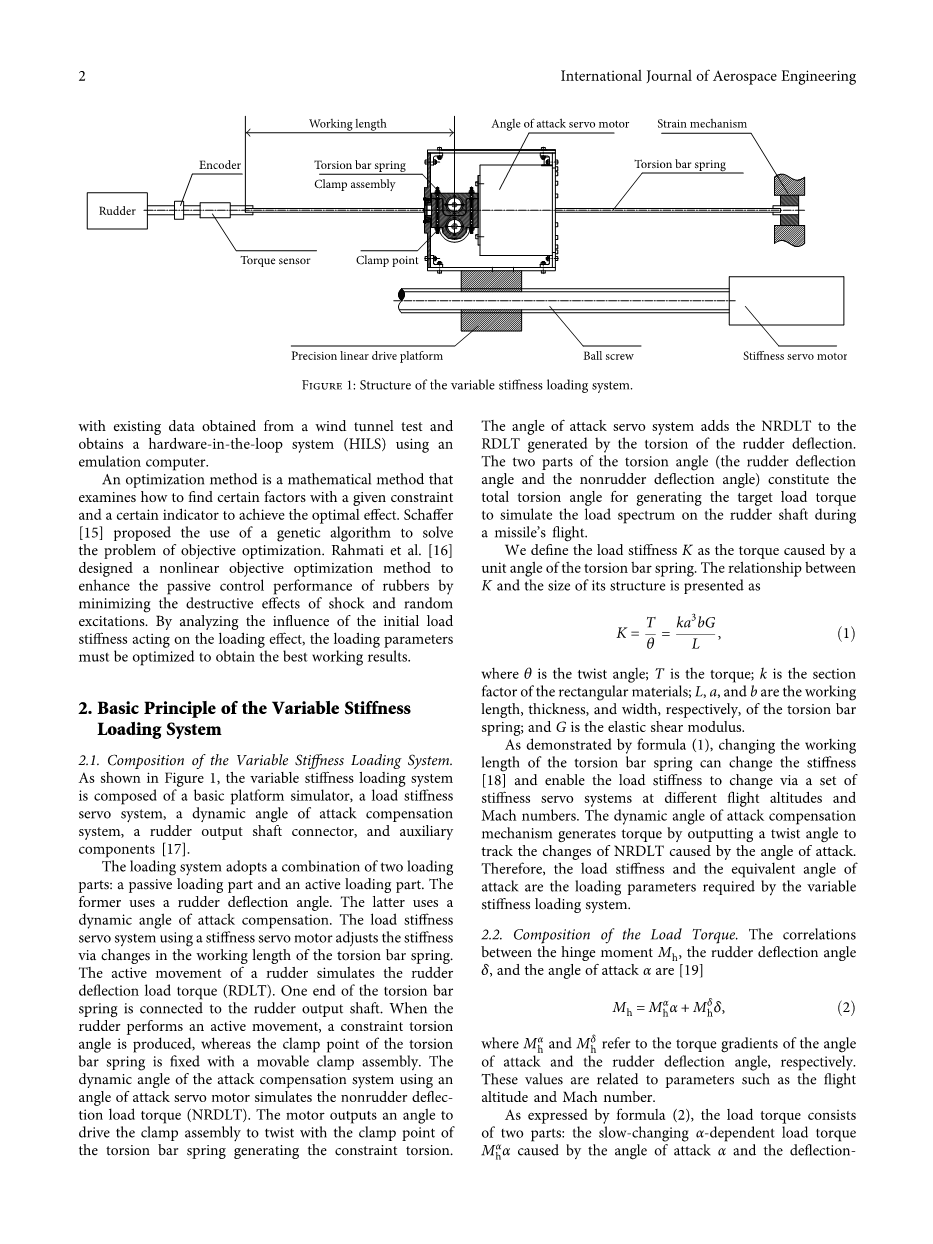
如图1所示,可变刚度加载系统是一个由基本的平台模拟器和一个负载刚度组成的伺服系统,一个方向舵输出轴连接器和辅助系统组件组成的动态攻角补偿系统[17]。
装载系统采用两种装载的组合部件:被动加载部件和主动加载部件。前者使用方向舵偏转角, 后者使用动态迎角补偿。通过改变扭杆弹簧的工作长度,使用刚度伺服电机的负载刚度伺服系统来调节刚度。舵的主动运动模拟舵偏转负载扭矩(RDLT)。扭力弹簧的一端连接到方向舵输出轴,当探测器进行主动运动时,会产生一个约束扭转角,而扭力杆弹簧的夹紧点则用一个可移动的组合件固定。该攻击补偿系统的动态角度使用一个攻角伺服电机模拟舵偏转负载扭矩(NRDLT)。电机输出一个角度,以驱动夹紧组件扭转,扭杆弹簧的夹紧点产生约束扭转。攻角伺服系统将NRDLT加到由方向舵偏转产生的RDLT上。扭转角(舵偏转角和舵偏转角)的两个构成部分用于产生目标负载扭矩的总扭转角,以模拟导弹飞行过程中舵轴上的载荷谱。
我们将负载刚度K定义为由扭杆弹簧的单位角度引起的扭矩K与其结构尺寸之间的关系表示为其中theta;是扭曲角度;
T是扭矩; k是部分矩形材料的因素; L,A和B是工作扭杆的长度,厚度和宽度; G是弹簧弹性剪切模量。如公式(1)所示,改变工作扭杆弹簧的长度可以改变刚度[18],并通过一组刚度伺服系统在不同的飞行高度和高度马赫数来改变负载刚度。动态攻角补偿机构通过输出一个扭转角来产生扭矩,以跟踪由攻角引起的NRDLT的变化,因此,负载刚度和等效迎角是变刚度加载系统所需的加载参数。
2.2负载扭矩的组成
铰接力矩Mh,方向舵偏转角delta;和迎角alpha;之间的相关性分别为[19]:
(2)
其中Malpha;h和Mdelta;h分别表示迎角和方向舵偏转角的转矩梯度,这些值与飞行高度和马赫数等参数有关。
如公式(2)所示,负载转矩由两部分组成:一个是由迎角alpha;引起的缓慢变化的并且取决于alpha;的负载转矩Malpha;halpha;,另一个是与舵的特性有关的偏转相关负载转矩Mdelta;hdelta;。
为了便于实现加载,我们认为Malpha;h等于Mdelta;h,这两者都被称为负载刚度并用K表示.K与飞行马赫数和高度的关系如下:
(3)
根据导弹飞行过程中转矩的特点,如公式(2)所示,变刚度负载转矩模拟系统将转矩分为两部分,在导弹的飞行过程中,载荷刚度将根据马赫数,高度和其他参数的变化而改变[20]。因此,负载刚度的变化率相对较慢,迎角的变化频率是有限的,而方向舵偏转的变化对于不同类型的方向舵变化很大。例如,对于非旋转式导弹舵,动态频率一般约为10 Hz,而旋转式导弹舵对动态频率要求较高。因此,导弹飞行期间方向舵的负载扭矩由两部分组成:与方向舵特征相关的RDLT和相对缓慢变化的NRDLT。
由扭杆弹簧提供的负载扭矩是与方向舵偏转角相关的被动扭矩,舵的主动运动不是负载转矩的耦合干扰,而是负载转矩的一部分,扭杆弹簧具有非常高的固有频率; 因此,该系统可以有效地减少传统加载装置的附加转矩。通过输出来自转矩电机的补偿迎角,系统根据舵偏转角主动运动产生的负载转矩输出补偿转矩,从而提高舵载荷的动态加载精度和响应带宽。
2.3 侵害赔偿视角的实现
Malpha;h与Mdelta;h不同。 在公式(2)中,通过引入负载刚度K =Mdelta;h,如果铰链时刻保持不变,攻角alpha;必须转换成等式攻角alpha;#39;,由公式(4)得出。
由于扭杆弹簧的扭矩与扭转角度成正比,因此可以通过作用在扭杆弹簧上的攻角伺服系统的部分输出等效迎角,这个扭矩是NRDLT, 由于实际飞行过程中攻角频率和振幅的变化有限,转换后等效迎角的频率和振幅通常很小。
- 加载参数的计算原理
传统的电力负载方法将转矩作为控制变量,通过使用HILS从仿真计算机接收离散数据点的插值来获得实时负载转矩。负载扭矩模拟系统需要跟踪扭矩命令,同时跟踪方向舵偏转角度。 因此,这种耦合系统会产生额外的扭矩,这会影响负载精度和响应带宽。
通过引入负载刚度,本文将负载转矩分为两部分。 关键问题是通过计算实时负载转矩获得的负载参数与马赫数,飞行高度和其他因素相关联。 风洞试验数据的计算原理如下:
- 对于固定马赫数的情况,将与每个迎角的值(即由迎角引起的NRDLT)相对应的负载转矩作为在0°方向舵偏转角处的偏移,即 记为Mh0。
- 对于步骤(i)中的马赫数条件,当方向舵偏转角不为0°时,负载转矩为Mh = Mh0 Mdelta;hdelta;。 该等式表明铰链力矩Mh被分成NRDLT M h0和RDLTMdelta;hdelta;,其中RDLT与方向舵偏转角delta;具有线性相关性。
- 线性化理论表述为:
其中Mh i 1和Mh i是当马赫数和迎角相等且舵偏转角不同时的负载转矩值。因此,获得舵偏转角Mdelta;h =Delta;Mh/Delta;delta;的转矩梯度; 即负载参数之一,负载刚度K =Mdelta;h。随着梯度Mdelta;h和无量纲铰矩系数mdelta;h,提出了以下公式:
其中rho;0= 1 225 kg / m3,V是飞行速度,Sref是控制面的基准面积,b A是控制面的平均气动弦长。由于在实际飞行中空气密度会根据高度而变化,
其中T = T 0 -0.0065H和T 0 = 288 15K。
由于从风洞试验获得的数据没有考虑飞行高度H(空气密度是恒定的)的影响或高度对刚度的影响,因此需要修正系数mu;来增加使用风洞获得的刚度 测试数据:
并且校正的负载刚度是:
- 将铰接力矩M h0所需的攻角值转换为等效攻角alpha;#39;,其定义为alpha;#39;= Mh0 / K *。根据可变刚度载荷模拟器的工作原理,该解决方案的目的是获得每次采样时的载荷参数,载荷刚度K和等效迎角alpha;#39;。
- 加载过程的实现
在变刚度加载过程中,需要进行两个步骤:首先,根据现有的风洞试验数据,得到合理的加载参数(包括载荷刚度和等效迎角); 其次,由此产生的加载参数必须合理地应用于加载装置以获得期望的加载效果。
-
- 解决方法
变刚度加载的概念总结如下:在加载过程中,加载刚度随着马赫数和高度的变化而变化。 扭杆弹簧工作长度的变化主要取决于马赫数和高度的变化。 在负载刚度下转换的攻角被称为等效攻角。 目标负载扭矩由弹簧的扭转角度决定,扭转角度由等效迎角和方向舵偏转角组成。加载过程解释如下:
- 处理现有的风洞试验数据,并获得测试马赫数的载荷刚度K。
- 从仿真计算机读取实时数据(包括马赫数,高度,方向舵偏转角,攻角和相应的负载扭矩)。
- 当前马赫数的载荷刚度通过插值计算,引入校正系数mu;以考虑海拔高度对载荷刚度的影响。 因此,获得当前飞行状态的实时负载刚度K *。 刚度伺服系统通过改变扭杆弹簧的工作长度来实时追踪计算出的负载刚度。 舵偏转的主动运动驱动扭杆弹簧的变形以产生具有负载刚度的RDLT。
- 使用从步骤(iii)获得的目标负载转矩Mh和负载刚度K *来计算实时NRDLT M0h,并且计算当前的等效迎角alpha;#39;。 攻击伺服系统的动态角度通过扭矩马达追踪等效迎角来驱动扭杆弹簧的变形,以输出NRDLT。 在载荷刚度的情况下,舵偏转角度通过扭转弹簧而引起变形。 基于变形,扭矩马达追踪输出弹簧扭转角的攻击的等效角度的叠加,这是输出目标负载扭矩的组合动作。
4.2解决方案示例:
如图2所示,通过根据所提出的方法应用风洞测试数据来获得与马赫数和迎角的变化相对应的负载刚度的曲线。
攻角的变化不会影响小角度范围内的负载刚度。 表1中显示了使用一组固定马赫数的风洞试验数据计算出的负载刚度集合。其他马赫数的负载刚度是在飞行过程中通过插值获得的。
仿真计算机被给出以下信号:
- 迎角信号是幅度为0〜2°且频率为0.8Hz的正弦信号。
- 马赫数信号是一个斜坡信号0〜4s为0.4〜1.1Ma,4〜8s为1.1Ma。
- 模拟时间为8秒。
方向舵偏转角信号采用Schroederphased谐波信号(SPHS),该信号由Schroeder [21]提出,并与多个与初始相位有关的振幅值,周期和余弦波叠加。调整信号余弦分量的初始相位角的组成以形成具有独特特性的周期性多重频率信号,其中NH是信号的谐波数,ak是第k个谐波的幅度 ,theta;k是第k次谐波的初始相位,Tp是信号基波的周期。 在实际应用中,通常采用a1 = a2 =⋯= ak = const;因此,给出了以下形式:
本文采用NH = 20和Tp = 4的方向舵偏转角信号:
输入信号曲线如图3所示:
加载过程中所需的负载刚度曲线如图4所示:如图4所示,根据表1中列出的离散数据,通过插值获得负载刚度。负载刚度的变化缓慢变化,因为马赫数没有显着变化。
根据公式(4)计算等效迎角alpha;#39;的曲线,如图5所示。频率和振幅的变化都很小; 因此,攻角伺服系统可以充分跟踪等效攻角。
指令负载转矩与实际负载转矩之间的比较如图6所示。
在图6(a)中,命令负载转矩是由仿真计算机实时发送的转矩命令,由风洞试验数据插值计算。 根据本文提出的方法,在计算的实时载荷刚度点处,通过等效迎角和实时方向舵偏转角的组合作用获得实际载荷扭矩。 根据本文提出的方法,图6(b)显示变刚度加载系统可以充分跟踪负载转矩,最大跟踪误差为0.05 Nm。
- 负载刚度的优化
如图2所示,对于马赫数和方向舵偏转角固定但随迎角变化而略有变化的情况,载荷刚度不是一个常数值。 我们只从风洞试验中获得了一些有限数量的离散数据点。 通过对从风洞试验数据中提取的离散数据点进行插值而获得的负载转矩为M 1 t,并且通过第3部分中描述的方法获得了该时间负载刚度和等效迎角。实际负载转矩在 M2 t; 那是,
其中M 1 t和delta;t是加载系统的实时输入,它们是由仿真计算机获得的,并且K t和alpha;#39;t分别是刚度伺服系统和攻角
全文共7362字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[9366],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

