英语原文共 10 页
基于驾驶行为预测的增程式汽车能量管理
Korosh Vatanparvar,研究生成员,IEEE, Sina Faezi,研究生成员,IEEE, Igor Burago,研究生成员,IEEE, Marco Levorato,成员,IEEE, Mohammad Abdullah Al Faruque,高级成员,IEEE
摘要:电池和能源管理方法已被提出用于解决电动汽车(EV)的行驶里程和电池寿命的设计挑战。然而,驾驶行为是这些方法中忽略的主要因素。在本文中,我们提出了一种新颖的估算方法,用于估计未来车辆速度方面的驾驶行为,并将此功能集成到电动汽车能源管理中。我们使用人工神经网络(ANN)的变体实现驾驶行为模型,称为具有外源输入的非线性自回归模型(NARX)。我们根据驾驶员真实的历史行为和他们最近的驾驶反应以及从谷歌地图中获得的路线平均速度来实验我们新颖的估算NARX模型,以实现特定驾驶员和自适应驾驶行为建模和长期估计。我们分析了我们的方法的估计误差及其对电池寿命关于汽车温度控制的影响,与各种最新估算方法相比较。我们的方法显示,对于长达30秒的速度预测,仅有12%的误差,与现有技术相比,这一方法改进了27%。因此,更高的精度有助于控制器在未来车速已知的理想条件下实现高达82%的最大能源节约和电池寿命改善。
关键词:电动汽车,电池,暖通空调,能源管理,统计建模,神经网络,模型预测控制,优化。
- 引言及相关工作
电动汽车(EV)作为一种零排放的交通工具被引入,以解决空气污染等环境问题。然而,电动汽车的主要设计挑战已经影响了他们的经济和可持续性,从而阻碍了他们的发展进程。电池中的电源能源引入了设计挑战,特别是对于具有严格设计限制的应用。例如,重量,成本和体积设计限制了存储在EV中的能量,限制了行驶范围。此外,电池容量在使用中降低,降低了电池寿命。此外,速率-容量效应降低了可用电池容量,从而降低了较高的放电率导致更短的行驶距离。
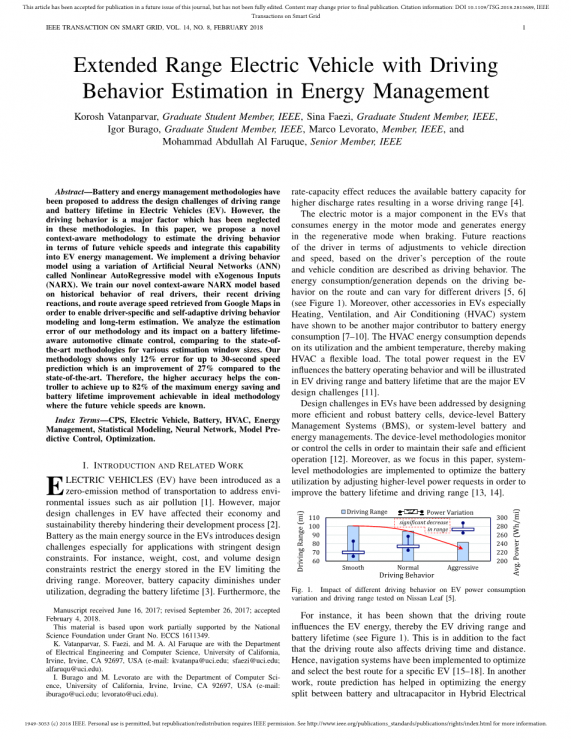
电机是电动汽车的主要部件,在电机模式下消耗能量,在再生模式下制动时产生能量。驾驶行为是基于对路线和车辆状况的感知,驾驶员对未来车辆方向和速度的调整反应。能量消耗/发电量取决于路上的驾驶行为,不同驾驶员的能量消耗不尽相同(见图1)。此外,电动汽车的其他配件,尤其是加热、通风和空调(HVAC)系统,已被证明是电池能量消耗的另一个主要因素。暖通空调的能耗取决于其利用率和环境温度,因此空调是一个灵活的负载。电动汽车的总功率要求,影响电池的运行范围,并影响电动汽车的行驶里程和电池寿命,这是电动汽车设计的主要挑战。
电动汽车的设计挑战已经通过设计更高效和更大容量的电池,设备级电池管理系统(BMS),或系统级电池和能源管理来解决。设备级方法监测或控制单元,以保持其安全和有效的运行。此外,本文还重点研究了系统级方法,通过调整更高级别的功率请求来优化电池的利用率,从而提高电池的使用寿命和行驶里程。
图1 在日产聆风上测试了不同驾驶行为对电动汽车能耗变化和行驶里程的影响。
例如,已有研究表明,行驶路线会影响电动汽车的能量,进而影响电动汽车的行驶里程和电池寿命(见图1),此外,行驶路线还会影响行驶时间和行驶距离。因此,导航系统已经实现,以优化和选择最佳路线的电动汽车。在另一项工作中,路线预测有助于优化混合电能存储(HEES)中电池与超级电容的能量分配。此外,还实现了考虑未来行驶路线的电池寿命感知汽车温度控制,在保证乘客温度舒适的前提下,预测电动汽车的功率需求,优化HVAC运行。
上述系统级电池和能源管理方法需要有关未来电动汽车功率请求的信息,以优化控制输入。因此,他们假设驾驶路线—可以由导航系统提供—是已知的,用于估计未来的电动汽车状态。然而,行驶路线并不是影响电动汽车功率的唯一因素。驾驶员的驾驶行为对行车路线条件也有影响。已经进行了一些实验来说明驾驶行为是如何影响功耗的。
驾驶行为动机案例研究:利用历史数据分析了不同驾驶行为水平对电动汽车动力的影响。图1显示了在FASTSim中模拟的日产聆风的功耗和估计行驶里程。
观察总结和结论:我们意识到驾驶行为可能会显著影响电动汽车的加速度和速度,从而影响其功耗。因此,驾驶行为也应纳入能源管理。然而,目前的电动汽车功率预测仅限于对行驶路线的预测。这一限制大大降低了电动汽车电池和能源管理所需的估计精度。
驾驶行为建模已经被研究和开发用于驾驶员辅助系统,特别是用于车辆安全目的。这些模型试图消除驾驶员0.5-1.5秒的决策延迟,并预测未来几秒内的反应。例如,在使用隐马尔可夫模型(HMM)、神经网络(NN)和图形建模的最先进建模方法中,驾驶员在未来3秒内对车速进行预测,准确率高达99.5%。出于安全考虑,这些控制器需要在事件发生前几秒钟内触发。因此,我们认为他们的预测是短期的(lt; 5秒)。然而,这些短期预测对于电池和能源管理方法来说是不够的。它们需要至少5秒以上的更准确和更长期的预测才能表现良好。对更长的预测时间的要求主要是由于所涉及的物理过程要慢得多。当预测时间与驱动段持续时间相当时,我们认为它们的预测是长期的。
A问题和研究挑战
针对电动汽车能量管理的驱动行为建模和评估问题提出了以下挑战:
1)电动汽车的能量和电池管理没有考虑驱动行为的优化,尽管它影响电动汽车的运行参数——行驶里程和电池寿命。
2)由于缺乏对驾驶行为的考虑,电动汽车功耗估算的准确性不高。
3)驾驶行为建模方法只关注最近输入的信息和当前状态(汽车周围的可见环境)进行短期预测。这导致预测在较长时间内不准确。
B主要贡献和概念审查
针对上述挑战,提出了一种新的电动汽车能源管理驱动行为建模与评估方法,该方法采用:
1)电动汽车建模(Section II-A):采用常微分方程(ODE)对电动汽车的电机、空调、电池等主要电动汽车部件进行建模,并对不同行驶工况下的功耗、电池寿命等运行参数进行估计。
2)驾驶行为建模(Section II-B):驾驶行为建模使用人工神经网络(ANN)的一种变体,通过实验新的环境感知与基于司机历史行为的外源输入非线性自回归模型(NARX),他们最近的反应,和谷歌地图报道了的路线的平均速度。这个评估模型根据车辆速度估计特定驾驶员的驾驶行为长达30秒(长期)。
3)融入电动汽车能源管理(SectionⅢ):电池和能源管理方法利用驾驶员对未来车速机动的估计,提高电池寿命和行驶里程。本文实现了一种电池寿命感知汽车温度控制系统,并利用我们提出的环境感知驾驶行为建模和评估方法对其性能进行了分析。
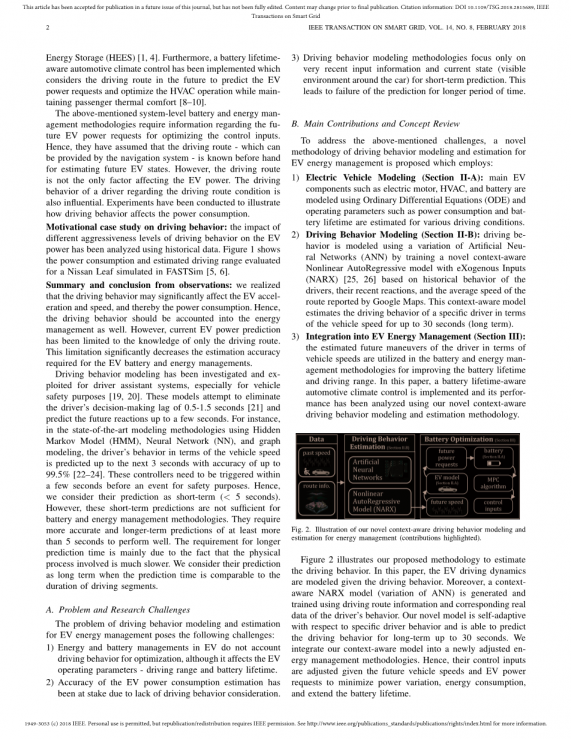
图2 说明我们的新评估驱动行为建模和能源管理评估(突出显示的贡献)。
图2展示了我们提出的评估驾驶行为的方法。根据电动汽车的行驶特性,建立了电动汽车的行驶动力学模型。此外,利用驾驶路径信息和相应的驾驶员行为真实数据,生成并实验了评估的NARX模型(ANN的变异)。我们的新模型是针对特定驾驶员行为的自适应模型,能够预测长达30秒的驾驶行为。我们将环境感知模型集成到一个新调整的能源管理方法中。因此,它们的控制输入会根据未来的车辆速度和电动汽车的功率要求进行调整,以最小化功率变化、能源消耗和延长电池寿命。
- 系统建模与评估
最近在电动汽车中应用的能源管理方法,如电池寿命感知、汽车温度控制,要求对电动汽车组件建模,以预测其动态行为和功率请求(见Section II-A)。此外,对驾驶行为和车辆的估计(见Section II-B)是准确估计电动汽车功率要求的必要条件。然后利用系统建模和估计对控制输入进行优化和调整,以提高电动汽车的行驶里程和电池寿命。
- 电动车辆
电动汽车作为一种汽车网络物理系统(CPS),由许多具有不同功能和职责的互联子系统组成。电动汽车有两个子系统(电动机和空调)是能源消耗/生成(即电池利用)的主要贡献者。需要对它们的功能行为进行研究和建模,以估计每个时间实例的电动汽车功率请求。
电动机产生驱动汽车所必需的力。电动汽车中电机的功耗或发电量是通过考虑电机特性和车辆驱动力(如:重力(Fgr)、气动阻力(Faero)和滚动阻力(Froll))来建模和估计的。
(1)
由电动机提供的牵引力(Ftr)克服了以期望速度(v)和加速度(a)推动质量为m的车辆前进的力。Ftr的方向由电机是否处于再生模式(再生制动)或电机模式来确定。
电机功耗(Pe)计算为:(2)
其中eta;m表示电动机效率包括将电转换为机械能的运动模式和转换电能的机械再生模式(再生制动)。eta;m依赖于电机转速和转矩生成的;其值按电机规格提供。
空调系统由汽车温度控制系统监控,以保持客舱温度。客舱温度(Tz)受送风温度(Ts)、流量(˙mz)、客舱热容(Mc)和空气热容(cp)的影响。这些变量与参数之间的关系是由描述空调系统温度的常微分方程定义的。
HVAC系统的功耗包括:1)冷却功率,2)加热功率,3)风机功率。冷热功耗由其进、出口气流的能量差决定:
3)
(4)
其中Pc和Ph分别为冷却和加热功耗。eta;c和eta;h的效率参数冷却和加热过程。此外,将冷却剂/蒸发器与空气之间的热交换模型化为效率参数。从机舱返回的空气(Tz)和外部空气(To)混合后再循环回冷却盘管。Tm为混合空气的温度,dr为混合分数[]。Tc为加热前冷却后出口空温度。风机功耗(Pf)与呈二次关系,kf是一个捕捉风机效率和管道压力损失的参数
(5)
模型的参数是根据空调规范设置的,以准确描述不同工况下的热力学行为。
电池提供电动汽车系统(如电动机和暖通空调)所需的电力。这些功率请求对电池的影响是通过电池运行行为模型,如充电状态(SoC)和电池寿命退化或健康状态(SoH))来评估的。
锂离子电池内部的可用容量随着放电速率(速率-容量效应)的增大而减小。这种效应是由使用有效电流的帕氏定律来模拟的。因此,电池的SoC由库仑计数和有效放电率的测量来估计:
(6)
其中Cn为制造商预定义的以(In)名义电流测量的名义容量。SoCt为t时刻的SoC值,pc为经验测得的锂离子电池类型的标致常数。对于这里使用的电池类型,pc被评估为1.1342。虽然这个常数是捕获电池消耗行为所必需的,但是我们的方法不受其值的影响。
在锂离子电池中,电流容量与标称容量之比(SoH)随着时间的推移而降低(容量衰减效应)。SoH的降解主要受电池应力的影响,电池应力由SoC偏差(sodev)和SoC平均值(SoCavg)模拟。SoH与SoC值在一段时间内的变化规律有关,如式7所示:
(7)
alpha;,beta;,a1, a2, 和a3估算SoH准确的参数是基于电池类型。对电池温度对SoH的影响进行全面的评估超出了本文的范围。因此,我们将其建模为方程7中的常数。
电动汽车部件采用上述方程建模。此外,它们的参数提取自厂商论坛和第三方测试车辆提供的实验数据(见表一)。
表一日产聆风电动汽车零部件规格。
- 驾驶行为
通过了解给定电动汽车模型的驾驶行为来评估车辆的驱动力(见Section II),驾驶行为取决于驾驶路线和驾驶员对特定路线条件的反应。虽然在电池优化中使用了驱动行为估计,但它们之间是相互独立的。以下,我们描述了最先进的方法,根据未来车辆速度对驾驶行为进行建模,该车辆速度将用于电池优化中的电动汽车功率请求预测:
1)设想(IDL)。在这个模型中,我们可以在任何给定的时间精确地预测车辆的速度。换句话说,控制器不仅可以访问以前和当前的车速,还可以访问未来的车速。
2)运动状态 (MP)。通常,在基于规则或基于优化的方法中,要么没有关于未来的假设,要么假设车辆将保持当前运动。换句话说,在这个模型中,未来车辆在h秒后,假设由以下基于物理的方程决定,
(8)
其中vt|0和为t时刻的速度和加速度值。vt|k为t k时刻预测的速度。
3)统计建模。在这种方法中,使用过去的速度、当前的速度和任何其他可能影响车辆速度的因素的信息来预测未来的车辆速度。由于当前速度和预测速度之间的相关性在未来的时间实例中会降低,因此估计误差会增加。为了解决这个问题,作为我们的新方法的一部分,从谷歌Maps APIs中提取的每个路段(v)的平均速度统计信息也被输入到模型中,提供了未来行驶路线的环境和条件。给定车辆的当前位置,可以使用地图数据库确定车辆未来的轨迹和平均速度值。在特定时间内的平均速度是一种特征和信息,它可以表示和建模一个路段的不确定性、路线状况和交通。因此,将其纳入模型将进一步降低预测误差。更多的特征可以用来提高精度,然而,路线的可用数据是有限的。
驾驶行为模型和预测,我们评估,是预测的车辆速度在接下来的h值在时间t未来1秒。统计建模的问题作为一个挑战是如何估计方程9中的函数f,
(9)
和代表过去d和d值实际速度和平均速度在时间t。代表未来的值h平均速度因为时间t。代表误差引入到系统由于其他因素影响未来速度(V h t)如天气,等等。然而,其他的影响因素被认为对所有的数据都是相同的,在建模和估计中被避免。因此,预计使用,f函数近似,我们调查了三个机器学习和近似建模技术:随机森林,前馈神经网络,NARX。
3.a)随机森林(RF)。将多元回归
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

