
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
基于概念模型的焊接机器人运动学结构评估的潜在方法
作者:Željko Ivandić, Todor Ergić,米兰克里金
原创科学论文
概要
本文提出了一种新的系统方法,用来评估焊接机器人的运动学结构,用于某些概念解决方案在产品设计的不同焊接形式中的应用。 生成的焊接结构的概念解决方案独立于机器人的八个运动学结构模型。 焊接结构的概念解决方案是根据焊接形式的产品设计模型中显示的实际性能的可能性来定义的。 对五组焊接结构进行了分析,在概念层面设计的每组产品中都有三个特征示例(这种方法可以生成15种不同的解决方案)以焊接结构的形式进行分析。 在本文中,我们将描述一个新的评估模型,通过应用潜在方法(决策工具之一)作为焊接机器人运动结构概念的适当选择钢结构技术。根据12个独立参数的要求清单进行选择。这些参数必须在十五种焊接结构模型中定义焊接机器人。需求清单由焊接形式的设计产品类型(十五种不同的解决方案)决定。所提出的评估程序的独创性主要在于基于产品设计的概念焊接形式评估焊接机器人运动结构权重因子的潜在方法的特殊应用。还介绍和描述了关于机器人焊接运动学结构和替代机器人结构的模型。引入的是根据焊接十五种焊接结构模型的标准来确定评估运动结构的标准的模型。这两组参数(运动结构组的参数和产品设计的一组焊接形式)使得应用的估算可接受性成为可能。文中计算了焊接机器人运动结构解的加权值,完全满足技术性能最高的机器人的理论设置和实际变型方案。此外,为了在本文范例中基于所定义的需求清单进行决策等全面的评估过程,我们建议并展示了使用潜在方法可以对其他任何系统进行预评估的程序。
关键词:产品设计,机器人,焊接,评估,潜在方法
介绍:选择适用于电弧的机器人焊接类型,取决于一些在应用程序中有所需要要求的机器人。 本文没有分析所有重要的不同参数对机器人焊接的替代选择有影响,更多细节可以在这里文献[1,2,3,4,5]找到,这并没有减少他们的重要性。 很清楚的是大部分的对焊接机器人的选择要求出现从产品设计的形式出发。 第二部分应用需求来自生产技术和生产过程的管理。由于技术和经济问题的复杂性标准需要认真的做法。 可能的违规行为在机器人焊接的应用中:错误的选择机器人焊接类型; 产品的错误设计不适合焊接机器人; 无法进行点焊或针对不可接受的机器人焊接模型选择技术。 所有这些以及这些都会在生产和经济损失过程中造成重大问题。 因此,本文的目的将是展示选择焊接技术机器人的过程,它可以通过应用新技术来提高生产率,并降低生产成本和劳动力在终端产品开发中的人性化。 选择用于焊接的机器人类型的起点是一个选定的请求列表,应该满足选定的机器人类型[5]。
考虑到机器人中未来用户可能缺乏焊接应用经验,选择问题尤其相关。 已知用于不同目的的各种机器人选择方法, 一些作者已经将机器人作为单独的复杂焊接系统进行研究。 作者Liang和Wang [6]提出了一种用于机器人选择的模糊TOPSIS方法。 作者Goh CH [7]提出了一个定义的加权和决策模型的修改过程。 该模型考虑了所考虑机器人的客观和微妙属性。 该模型包含了一组专家在选择机器人时所分配的不同属性值。 Parkan和Wu [8]提出了一种称为运营竞争力评级(OCRA)和多重属性决策方法(TOPSIS)的程序。
根据作者的最佳知识,尚未观察到用于焊接机器人的潜在方法。 在本文中,我们将通过应用Potential方法来描述新模型评估。 潜在方法是决策制定工具之一。 但该方法适用于焊接工艺中机器人焊接概念运动结构的选择。 基于产品设计的概念焊接形式,这项工作的贡献通过基于潜在的运动学结构重量因子评估方法的特殊应用提出了评估程序的独创性。 本文介绍了这种方法,给出了基于定义的需求清单选择焊接结构的运动学机器人的最终解决方案,这是一种尚未用于此目的的方法。
本文组织如下。 在第2节中,列出了机器人操纵器的八种最常用的运动学结构,并列出了考虑到五种不同的焊接结构概念模型应满足的要求。 在第3节中,给出了潜在方法的简要说明,并在第4节中根据上述要求描述了其用于评估不同运动结构的应用。 本文结束并为未来的工作提出了一些想法。
2. 焊接机器人运动结构要求清单
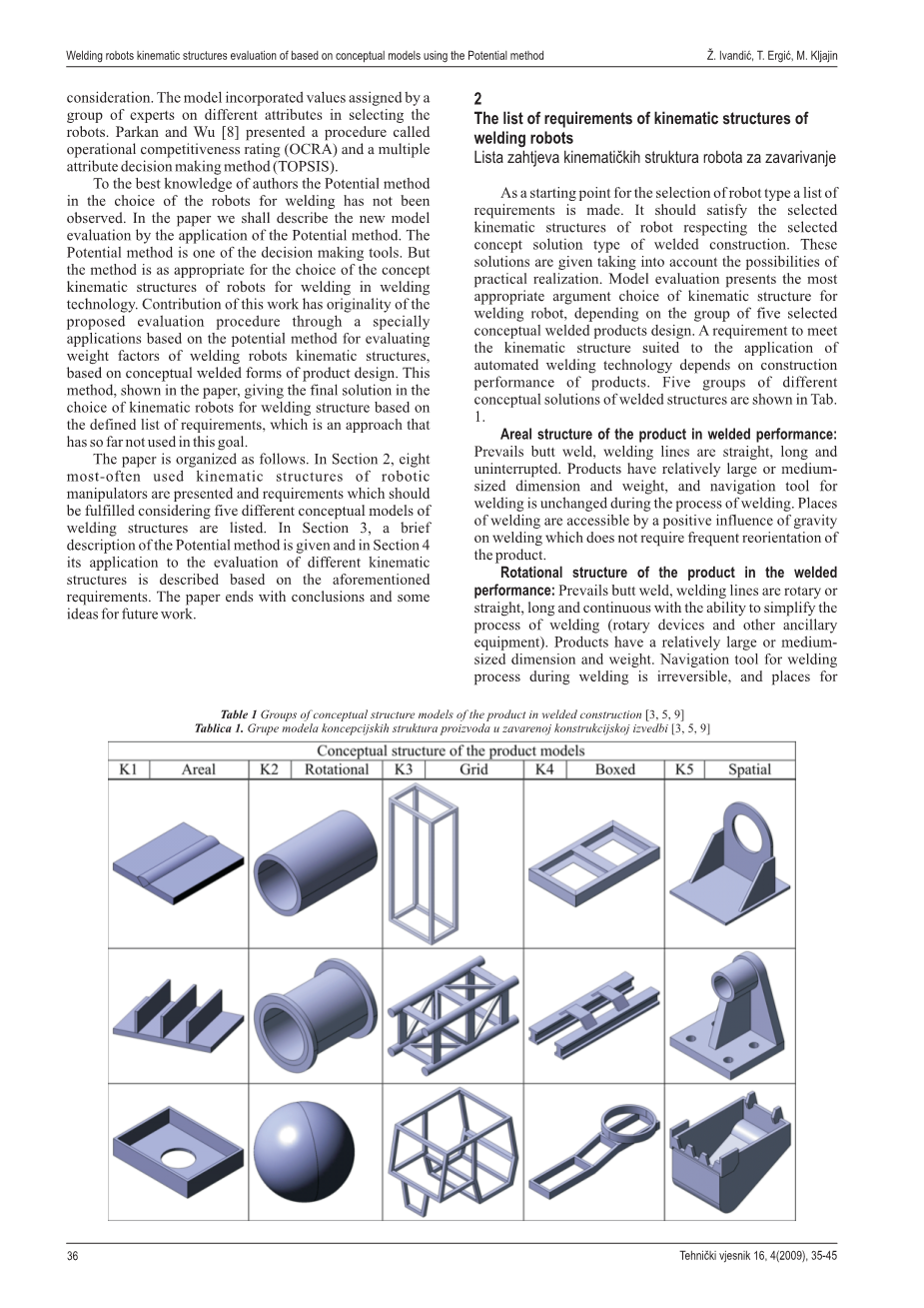
作为选择机器人类型的起点,制定了一系列要求。 它应该满足机器人选定的运动学结构,尊重所选概念类型的焊接结构。 考虑到实际实现的可能性,给出这些解决方案。 模型评估为焊接机器人的运动结构选择提供了最合适的参数,取决于五个选定概念焊接产品的组合。 满足适用于自动化焊接技术的运动结构的要求取决于产品的结构性能。 表5显示了五组不同的概念性解决方案。
1. 焊接线直,长而不间断。 产品具有较大或较小的尺寸和重量,焊接过程中焊接导航工具不变。 焊接位置可通过重力对焊接的积极影响而获得,而不需要频繁重新定向产品。
产品在旋转结构中的焊接性能:预先对接焊缝,焊接线旋转或直线,长而连续,能够简化焊接过程(旋转装置和其他辅助设备)。 产品具有相对大或中等尺寸和重量。 焊接过程中的焊接过程导航工具是不可逆转的,并且可以进行焊接的位置。 由于重力的影响,焊缝的有利位置不需要焊接和重新定位产品的位置变化。
产品的晶格结构在焊接性能方面:盛行角焊,焊线直线,短而不连续。 许多相同的焊缝在长度和方向上重复出现。 产品具有相对较大或较大的尺寸和重量。 焊接过程的焊接过程不变,并且焊接位置的接近可能很复杂。由于重力对焊接的影响,焊接的不利位置需要频繁地重定向产品。
产品的盒装结构在焊接性能方面:普遍存在角焊缝,焊接线是直线和直线的,并且焊缝较短且断裂的次数较多。 产品具有相对较大或较大的尺寸和重量。 用于焊接过程中的焊接过程的导航工具不变,并且访问焊接位置通常是复杂的。 由于重力对焊接的影响,焊接的不利位置需要频繁地重定向产品
产品在焊接性能上的空间结构:预先存在角落焊缝,焊接线是直的,弯曲的焊缝较短且断裂的次数较多。 产品具有相对大或中等尺寸和重量。 焊接过程中的焊接过程的导航工具是浮动的,并且对焊接位置的访问通常是原始的。 由于重力对焊接的影响,焊接的不利位置需要频繁地重定向产品。 除了这些由施工产生的产品特征外,还有其他要求,其中一些可以在第二个表中系统地显示。
为了达到三维操作空间中的任何点,打开运动链机器人的三个运动自由度是必要的(但并非总是足够的)。 对于定位和达到点,需要三个运动自由度。 因此,最现代的工业机器人具有六个自由度的运动,其中最后三个围绕最多交叉一点的轴线旋转。 由于每个运动自由度可以是平移(T)或旋转(R),所以运动链可以建立在八种不同的方式上,这对应于具有两个元素的第三行重复的变化的数量(其是8)。 每个旋转和平移运动自由度可以通过三种方式选择,每种变化可以用多种方式进行编写,因为有三种元素重复变化(即27)。
因此,对于具有三个运动自由度的开放运动链来说,可以得到总共216个不同的运动结构组合(8times;27 = 216)。 在这216个运动学结构中,尺寸空间操作是不可能的。 一般来说,尽管它具有三维性,但它只能通过线或平面的运动来实现,或者只能形成一维或二维空间。 这样的结构不是空间的,它们在结构发生时发生:两个相似的平移,三个相似的旋转,两个不相似的平移和围绕第三轴的旋转,以及两个类似的沿着其余两个轴之一的旋转和平移。
使用这些起点,从216个理论上可能的运动学结构,87不是可空间构建的。 这意味着通过设置坐标所需的空间可以通过129个可建立的机械手/机器人运动结构来实现。 如果您采用动态分析得出的建议,机器人的第一篇文章必须是垂直强制性的,那么理论上可能的结构数就减少到72个。将可能的空间可建造结构数 减少到43,其中40是对称的并围绕该轴旋转pi;/2。
实际上,有23种不同的可建立的空间结构,其中八种分析结果在第三个列表中示意性地示出对各种类型的机器人性能给出的评分在表3中给出。 可以确定表1中焊接结构的应用的可塑性。
表1焊接结构产品的概念结构模型组[3,5]
表2焊接机器人不同运动结构的要求列表
|
数字 |
应用程序描述根据表1,由于机器人的运动学结构能够用于类型产品的焊接技术的要求 |
尺寸,单位,公差 |
应用描述 |
|
|
要求 |
目的 |
|||
|
1 |
机器人专为弧焊而设计 |
Tradic; |
||
|
2 |
运动结构的类型应该是通用的(适用于焊接结构的所有五组概念产品结构) |
Tradic; |
||
|
3 |
适合一定形状的产品大小 |
|||
|
最大长度 |
le;5000mm |
Fradic; |
||
|
最大宽度 |
le;2000mm |
Fradic; |
||
|
最大质量 |
le;1000mm |
Fradic; |
||
|
4 |
简单的性能 |
O,Eradic; |
||
|
5 |
非常流动的结构 |
Fradic; |
||
|
6 |
一个适合的工作范围 |
Fradic; |
||
|
7 |
合适的焊接速度和加速度 |
vle;1.5m/s |
Fradic; |
|
|
8 |
要求精度 |
le;0.25mm |
Fradic; |
|
|
9 |
负载(质量) |
le;10Kg |
Fradic; |
|
|
10 |
简易编程 |
O,Tradic; |
||
|
11 |
易于维护 |
O,Eradic; |
||
|
12 |
考虑到批量生产的规模价格的合理性 |
2.5*10^6件/年 |
Eradic; |
|
|
注:F - 功能,T - 技术上,E-电子经济上,O - 维护, |
||||
表3在焊接适应性方面进行分析的焊接机器人的运动结构示意图
3潜在方法的简要说明
作者L.Čaklović[10,11,12,13]让我们假设一个决策者对这组备选方案V进行配对比较。 如果v比u更优选,则对alpha; =(u,v)ϵV*V被声明为有向图的弧。一个不相比较的不相邻的图。所有弧的集合用A表示。一个函数F:A→Omega;赋予每个弧alpha;ϵA其优先权称为优先权流。显然,偏好流总是非负的,并且可以表示为times;1矩阵。方向图(V,A)称为偏好图。如果比较每一对替代物,即对于顶点(I,j)ϵA或(j,i)ϵA的每对{I,j},则偏好图是完整的。对于偏好图(V,A)和alpha;ϵA上的给定流F,我们使用惯例F(-alpha;):=-F(alpha;)。让我们用n和m分别表示V和A的基数。 偏好图的关联矩阵用B表示,它是由[10,11,12,13]定义的mtimes;n矩阵:
-1→如果电弧alpha;离开节点i
= 1→如果电弧alpha;进入节点I (1)
0→其
全文共10790字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[8732],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

