基于以振动和速度信号的复值径向基函数网络的气缸压力重建
摘要:内燃机气缸压力测量和监控的方法能有助于减少燃油消耗、噪声和废气排放。由于用直接测量法测气缸压力成本昂贵,对于在路上行驶的车辆来说也不适用,因此非直接测量法测气缸压力有很大的潜在价值。在本文中,拟将一个基于复值径向基函数网络(RBF)的非线性模型用于缸内压力脉冲波的重建。发动机的振动和曲轴的转速波动两者的傅里叶变换构成函数网络的输入。应用傅里叶变换的主要原因是不同频率区域的信号都将被用于气缸压力的重建过程。这种方法也使减少被用来作为RBF网络的输入的信息数量更为简易。这种复值径向基函数网络可用来在一个广泛的运行条件下测量6缸以上的乙醇柴油驱动的发动机。预测的精度通过比较大量的参数得以验证,这些参数是来自测量和预测之间的气缸压力波形比如最高压力、最高压力升高率和平均指示压力。这种网络的性能也是由大量的非训练的运行条件评估的,这些运行条件下的转速和负荷都和训练条件下的不同。验证的结果是和训练条件下相符的。
关键词:RBF网络、气缸压力、压力重建、发动机性能评价
- 介绍
燃烧压力波的测量和分析在内燃机提升性能、控制排放、控制噪声和状态监测方面起着重要的作用。用压力传感器直接测量缸内压力由于大量的限制不适用于外部实验室。直接测量必须用到一个高性能的压力传感器,而且缸内恶劣的工作环境会使得传感器的使用寿命收到限制,这导致这种方法的费用十分昂贵。同时,要找到一个合适的位置安装压力传感器也很困难并且要设法避免传感器由于校准、波传播和累计而产生的误差。因此,人们在过去20年里已经在努力寻找一种既稳定又可靠的方式通过非直接的方法来重建压力波。其中有两种不同的方式已经被进行了研究,分别是振动计量重建和曲轴角速度计量重建。
已经显示无论是振动还是角速度信号都包含着关于气缸压力的信息,但是是在不同的频率区域[1,2]。因为角速度不像振动信号对瞬时压力的变化那样灵敏,所以角速度的波动来自气缸压力的低频内容[2]。对于振动,由于在低频范围低的信噪比,使得压缩和膨胀阶段的燃烧过程的重建不确定。在这两种情况下,气缸压力、振动响应和曲轴速度之间的关系是非线性的而且随运行条件而改变。
|
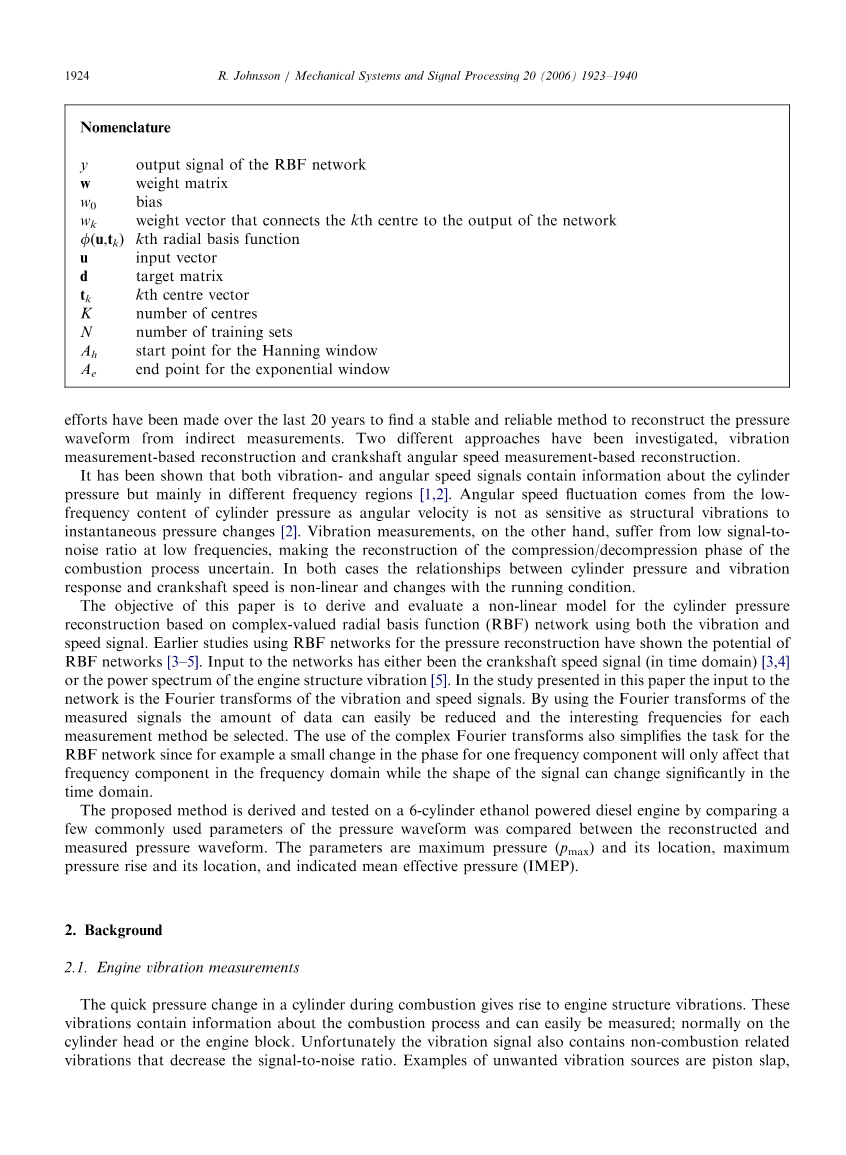
Nomenclature(术语) |
|
|
y |
径向基函数网络输出信号 |
|
w |
权矩阵 |
|
w0 |
偏差 xrsquo;z |
|
wk |
权向量连接第k中心网络的输出 |
|
phi;(u,tk) |
第k径向基函数 |
|
u |
输入向量 |
|
d |
目标矩阵 |
|
tk |
第k中心向量 |
|
K |
中心数量 |
|
N |
训练集数量 |
|
Ah |
汉宁窗的起点 |
|
Ae |
指数窗的终点 |
本文的目的是使用振动和转速度信号为基于复值径向基函数网络的气缸压力重建推导和评估出一种非线性的模型。早期使用RBF网络进行缸压重建的研究已经显示出了RBF网络的潜力[3-5]。这种网络的输入要么是曲轴的转速信号(时域)[3,4]要么是发动机振动的功率谱[5]。在这项研究中提出了网络的输入是振动和速度信号的傅里叶变换。通过使用所测信号的傅里叶变换,可以容易的将数据量减少,每种测量方式中令人关注的频率能够被筛选出来。复杂傅里叶变换的使用也能简化RBF网络的工作量,因此,当一个频率分量发生了一个小的相位变化,将只会在频域方面影响那个频率分量,但是在时域方面信号的形状会发生明显的改变。
该方法是在一个6缸乙醇柴油驱动的发动机上通过在压力波的重建和测量之间比较一些压力波的常用参数而推导和测试的。这些参数有最高压力及其位置、最高压力升高率及其位置和平均指示压力。
-
背景
- 发动机振动测量
燃烧时缸内压力的迅速变化加剧了发动机的振动。这些振动包含了燃烧过程中的信息,也容易被测量(一般在缸盖或者缸体上测量)。不幸的是,这些振动信号也包含了与燃烧无关的振动,这会使信噪比降低。非期望的振动源有活塞的冲击、阀的影响和齿轮的传动。就振动测量已经有两种方式被用来进行缸压重建,分别是反向滤波[1,2,6-11]和神经网络[5]。
反向滤波是基于发动机的结构能被建模为一个线性不变的系统的假设和所测振动信号是一个对缸压的无干扰的响应的假设。这种方法的困难之一是在频域中FRF的逆计算是一个不易的操作。为了获得一种更完善的解决方法,有一些不同的方法如倒谱分析法[1,2,7-10]和时域滤波法[11]。另一个问题是FRF改变了速度和负荷条件,即系统是非线性的。鉴于这个原因,Zurita用了一个矩阵的传递函数来应对不同的运行工况[10]。
神经网络是非线性的,因此通过它在气缸压力和发动机振动之间进行非线性建模是很合适的。Du[5]用一个RBF网络,通过振动信号的功率谱来预测缸压。
-
- 曲轴角速度测量
当气缸着火时,由燃烧产生的力矩将会变得比外部力矩更大,这会致使曲轴转速增大。当下一个缸开始压缩时,内部燃烧产生的力矩会下降到低于外部力矩的大小,曲轴的转速会因此降低。这种结果正是由发动机转速的脉冲波动与包含各缸之间燃烧压力信息的曲柄转角而产生的。针对压力重建,人们已经提出了几个不同的方法,如发动机数学模型[12-16]、模式识别[17]、神经网络[3,4,18]和反向滤波[1,19]。
发动机数学模型是基于转矩平衡方程的数值解决[12-16]。这种方法的缺点是,必须要完成一定的简化和假设来解决转矩平衡方程。一种常见的简化是使用常数极惯性矩来建模。然而,Shiao[20]指出惯性矩在极大程度上由转角决定,特别是对于缸数较少的发动机。Moskwa[21]等人介绍了一种可以补偿变的惯性矩的方法,从而实现了他们所谓的“合成”速度。这种“合成”速度将被用来衡量惯性矩是否为常数。“合成”速度和气缸压力之间的关系是线性的,这使建模简化。如果计算了曲轴的“合成”转速,就可以在“合成”曲轴转速和气缸压力之间用FRF来对气缸压力进行重建。Moro[18]对这种手段已经有所研究,他可以在一个4缸机上超过180°的重建出前三个谐波。Johnsson[1]结合了气缸压力重建的低频速度测量和缸盖的高频振动测量来扩大已重建气缸压力的频率区域。
模式识别使用许多不同的工况下对发动机实际测量方法的数据库。一个测得的速度信号将会和数据库里的信号相比较。因为不是所有的工况都能储存在数据库中,所以必须要用一些插值技术来克服这个限制。Brown用模式识别法加上线性插值法来预测给定速度和负载条件下欠油或者不欠油下的峰值压力。用一个适当的非线性插值技术使得可以使用该方法用于更广泛的工况组。
Johnsson[19]根据曲轴速度波动,使用简单的前馈神经网络来预测6缸柴油机的最大压力和燃烧始点(SOC)。Jacob等人开发了一种使用RBF网络的更为复杂的方法,[3]这种方法中压力波得到了恢复。来自与Jacob相同的研究组的Gu等人,能够重建误差小于5%的最大压力[4]。
- 压力、振动和速度信号分析
本文前面指出,振动和速度测量包含着关于不同频率区域压力的信息。其中曲轴转速包含着缸压的低频信息;而振动信号包含着缸压的更高频率的信息[1]。相关分析的进行显示在本研究中使用的发动机是否属于这种情况。图1显示出压力的时间信号,6缸乙醇柴油驱动发动机在两种不同工况下的振动和速度,实验设置见第5节。在图2中,相同的信号被呈现,但是是作为它们傅里叶变换的幅度,可以看出气缸压力的频率含量随工况的变化。随着负载增加,压力脉冲的高频部分减小,时间信号变得更平滑。图1和图2中的工况下缸压、振动和速度的相关性在图3中显示出。在图4中,显示着不同工况下振动和速度方法的频率响应函数。
图 1:工况为1500r/min分别在25%、75%负载下气缸压力、发动机振动和角速度随时间变化的信号
图 2:工况为1500r/min分别在(a)25%、(b)75%负载下气缸压力、发动机振动和角速度的大小
图 3:工况为1500r/min分别在(a)25%、(b)75%负载下气缸压力和发动机振动(实线)和角速度(虚线)之间的相关性
图 4:不同工况下的频率响应函数(实线:1200r/min、25%负载;点划线:1500r/min、50%负载;虚线:1800r/min、100%负载),(a)振动(b)速度
从图3和图4中的例子可以得出一些结论。发动机振动和曲轴的角速度主要在不同的频率区域中包含着气缸压力的信息。曲轴的角速度的与气缸压力的最低频部分具有最高的相关性,相反发动机振动在更高频区域与气缸压力有最高的相关性。同样明显的是,振动和角速度方法的频率响应函数随工况而变化,这证明它们之间的关系是非线性的。通过用能够非线性建模的方法结合发动机振动和曲轴角速度测量,气缸压力重建就可能在一个广泛的工况条件下进行。本文所述的方法是用一个RBF(复杂径向基函数)网络来进行气缸压力重建。通过将信号变换到频域,对于每个信号的频率区域选择是容易的,同时数据量将减少。
- 复值径向基函数网络
RBF网络是多层前馈神经网络的子组。RBF网络的一个优点是它们可以以比用反向传播算法训练的神经网络的情况更直接的方式训练。然而,RBF网络可以变得比用反向传播训练的网络更大,以便实现相同的准确性。
图 5:单输出RBF网络示意图[23]
通常,RBF网络的开发采用实值输入和输出数据。在本节中,将讨论更一般的复值RBF网络[22],它的输入和输出都是复值。实值RBF网络是这种更为一般的RBF网络的一个特殊情况。复值RBF网络的拓扑如图5所示。中心(tk)和权重(wk)是复值,而来自隐藏层的输出是实值。
复值径向基函数网络的输入-输出映射(在这种情况下具有单个输出),具有如图5所示的符号。
上式中项是第k个计算输入向量和它的中心之间相似度的RBF。RBF单元的输出是一个和之间距离的非线性函数。是一个偏置值而到是来自每个RBF单元输出的权重(缩放因子)。隐藏单元的输出(实值)这样计算:
式中是高斯函数的宽度,并且输入向量和中心都是复值。指数代表着Hermitian运算,也是矩阵的共轭转置,RBF网络的复值输出根据下式计算:
每个隐藏单元的中心的宽度(实值),可以在实值和复值情况下,对于每个单元是不同的或者是设置为一个固定值,然而一个固定值能导致一个更简单的训练战略。
最简单的训练算法是随机选择K个训练样本,并将其用于隐藏层单元中的K径向基准中心(),然后可以通过最小二乘法计算权重。该方法假定训练数据以代表性方式分布。对于这种方法,通常将高斯函数的宽度设置为固定值,并且输出层中的权重用最小二乘法计算[23]。
这种方法的缺点是它不能保证准确的性能。此外,对于给定的性能水平,该方法通常会导致网络较大,而且较大的网络本是不必要的,这种现象的结果是会导致数值病态[22]。对此,有人已经提出了用于选择中心的几种更先进的方法,例如:
- 递归混合学习[22,23]
- 随机梯度法[23]
- 正交最小二乘学习[22,24]
在这项研究中,应用了一个版本的递归混合学习。它包括k-均值聚类以找到中心和在过程中使用正规化来确定权重。k-均值聚类基于训练案例中的相似性将训练集划分为k个簇。正则化将增加解的平滑性,从而得出更鲁棒的解。
-
- k-均值聚类
k-均值聚类算法计算k个中心,从而将输入数据分割成k个簇。k-均值聚类将每个观察值看作为具有空间位置的对象。研究发现聚类中的对象尽可能彼此接近,而聚类尽可能彼此分离。每一个聚类由它的成员和中心定义。每个群的中心是与该聚类中所有其他对象的距离总和最小的对象。
k-均值聚类是一种迭代算法,通过在聚类之间移动对象,最小化从每个对象到其聚类中心的距离的总和,直到总和不能进一步减少。结果是k簇尽可能紧凑并彼此分离。k-均值聚类算法的一个缺点是它可以达到局部最小值,这意味着最终结果取决于聚类中心的初始选择。
-
英语原文共 18 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[145190],资料为PDF文档或Word文档,PDF文档可免费转换为Word
- 正则化和最小二乘法 全文共14940字,剩余内容已隐藏,支付完成后下载完整资料
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

