英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
受限水道中船岸间距、航速和航道尺寸对船舶操纵性的影响
摘要
采用基于系统的方法研究了内河受限航道中的船舶操纵性。采用非线性瞬态水动力模型和约束模型揭示了航道岸坡和底面对船舶操纵的影响。首先,利用回转圈试验对船舶操纵模型进行了验证,利用试验数据对约束模型进行了验证。然后,通过改变船岸间距、航速和航道宽度,研究它们对船舶操纵性的影响。在岸坡附近,船岸间距越小或者船舶速度越大,船舶的运动轨迹偏离原航向的程度越大,艏侧偏角越大,这将增加船舶操纵的难度。航道宽度越小,船舶的前进阻力越大。最后,选取并研究了船舶离边坡的最小距离。建议在限制航道内船舶航行于航道中间并保持合理速度。
关键词:船舶操纵;受限航道;岸壁效应;轨迹;基于系统的方法;回转圈试验
1.引言
在内陆运输过程中,船舶不可避免地会在水动力作用十分严重的受限区域内进行操纵。当船靠近岸边移动时,船头会被岸边推开,称为岸推,而船体则被岸边吸引,称为岸吸。如果这些影响超过一定程度,船舶就会变得难以控制,从而可能导致碰撞、搁浅等海上事故。因此,研究船舶在受限水域的操纵具有重要的意义。
船舶操纵问题的研究由来已久,今天仍然被研究者不断的改进发展。早期,通过约束模型试验和一些数学方法确定水动力系数。后来,进行基于系统的仿真,对船舶操纵性进行预测。与试验和CFD(计算流体力学)方法相比,在PC(个人计算机)上进行一次免费试用只需要几分钟。这在船舶设计的初步评估中是非常有效的,只要模型和系数足够精确,结果就可以令人满意。人工神经网络[1,2]、支持向量机[3]和优化技术[4,5]已被用于识别船舶的水动力导数和模拟船舶操纵。利用这些技术可以优化船舶参数,实现高精度的操纵仿真。
采用基于系统的方法研究受限水域的船舶操纵已经被开展。Lee和Lee[6]利用船-岸相互作用研究船舶操纵,研究发现,当船舶接近楔形岸坡时,由于吸力和力矩的共同作用,可能会使船舶遭遇碰撞危险。 Lee[7]的另一项工作是评估船舶在受限水道中的航行安全。研究发现,较小的
船舶受船舶相互作用的影响较大,并提出了适当的安全航速和安全距离。采用更先进的模型,可以提高该方法的精度,得到更符合实际的结果。
本文采用基于系统的方法研究了船舶在受限航道中的操纵问题。在非线性操纵方程中,将航道边坡和底部的影响作为外力来实现。通过改变船岸间距、船速和航道尺度来研究船舶轨迹和偏航角的约束效应,将船舶与岸线之间的最小距离拟合为这些因素的函数,以定量描述船舶在受限水域的航行。
2.操纵方程
2.1非线性瞬态水动力模型
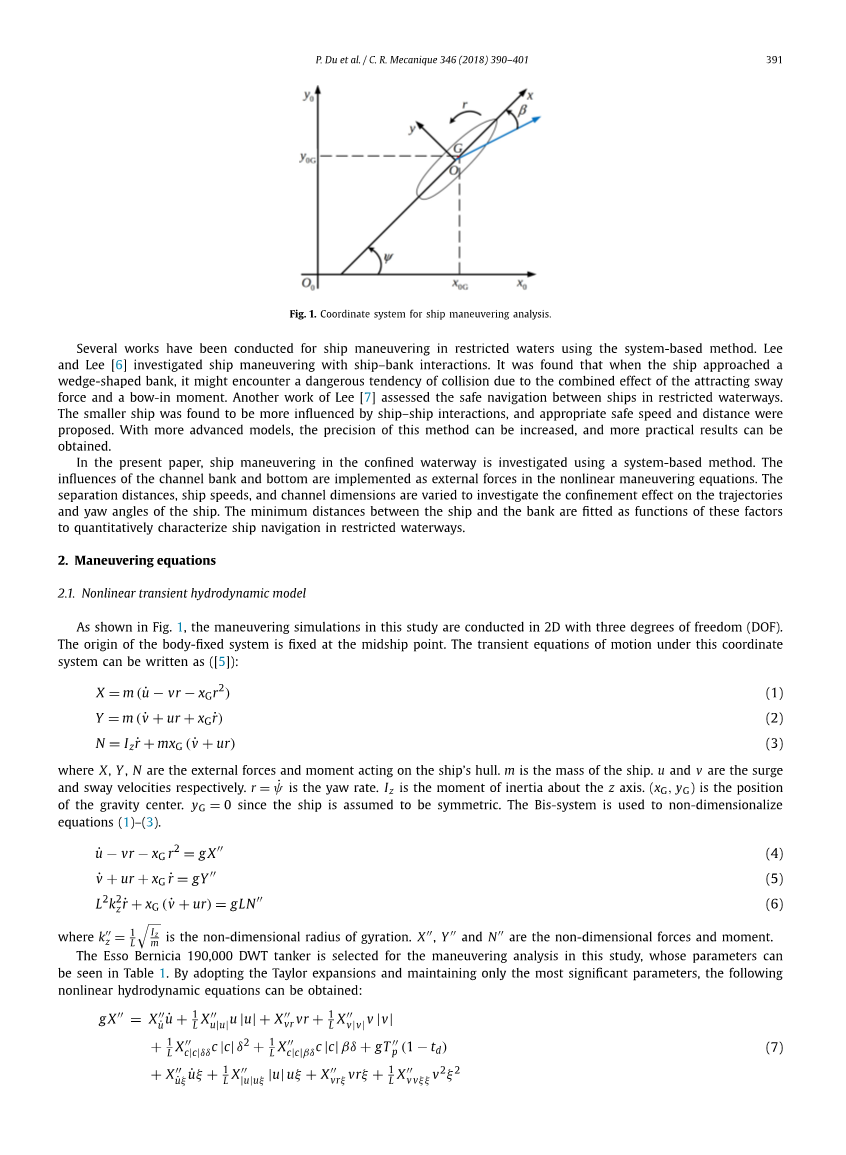
图1 船舶操纵分析的坐标系
如图1所示,本研究中的机动仿真是在具有三个自由度(DOF)的二维环境中进行的。船体固定系统的原点是船舶中点。在这个坐标系下的瞬态运动方程可以写成[5]:
(1)
(2) (3)
其中X、Y、N是作用在船体上的外力和力矩。m是船的质量。u和v分别是纵荡和横荡速度。是横摆角速度。是关于轴的转动惯量。(,)是重心的位置。假设船是对称的。Bis系统用于无量纲化方程(1)–(3)。
(4)
(5)
(6)
其中是无量纲回转半径。是无量纲力和力矩。
本研究选用Esso Bernicia 190000载重吨油轮进行操纵分析,其参数见表1。采用泰勒展开式,只保留最重要的参数,可得到下列非线性水动力方程:
(7)
(8)
(9)
式中,hellip;是无量纲流体动力导数。在这项工作中使用了[8]中的优化方法,其值如表2所示。g、、和分别是重力加速度、舵角、推力扣除系数和漂移角。,其中h和T是水深和吃水深度。无量纲螺旋桨推力方向舵c处的流速由下式给出:
(10)
(11)
式中,和 是螺旋桨的水动力系数。和是舵的水动力系数。n是转速。建立方程(4)–(6)与方程(7)–(9)之间的关系,求解船舶运动参数u、v、r、x、y、Psi;、delta;、n等。
表1 Esso Bernicia 190000载重吨油轮的几何参数
|
几何参数 |
数值 |
|
船长() |
304.8[m] |
|
船宽(B) |
47.17[m] |
|
设计吃水(T) |
18.46[m] |
|
排水量(nabla;) |
220000[m3] |
|
|
6.46 |
|
B/T |
2.56 |
|
方形系数() |
0.83 |
|
设计速度() |
16[knots] |
|
标准螺旋桨转速(n) |
80[rpm] |
表2 Esso Bernicia 190000载重吨油轮的水动力系数
|
No. |
系数 |
数值 |
No. |
系数 |
数值 |
|
1 |
-0.0500 |
18 |
|
-1.5000 |
|
|
2 |
1.0200 |
19 |
|
-0.1200 |
|
|
3 |
-0.0200 |
20 |
|
0.1794 |
|
|
4 |
-2.1600 |
21 |
|
0.0000 |
|
|
5 |
0.0500 |
22 |
|
-0.2043 |
|
|
6 |
-0.0200 |
23 |
|
0.1220 |
|
|
7 |
-0.0608 |
24 |
|
-0.0883 |
|
|
8 |
-2.4000 |
25 |
|
0.0125 |
|
|
9 |
-0.3000 |
26 |
0.6880 |
||
|
10 |
0.3000 |
27 |
-0.1910 |
||
|
11 |
-1.2050 |
28 |
0.3440 |
||
|
12 |
-0.4510 |
29 |
|
0.2480 |
|
|
13 |
-0.0500 |
30 |
|
-0.1717 |
|
|
14 |
-0.3780 |
31 |
|
-0.0312 |
|
|
15 |
0.1420 |
32 |
|
-0.0054 |
|
|
16 |
-0.0448 |
33 |
|
-0.0050 |
|
|
17 |
0.3780 |
34 |
|
-0.0984 |
2.2 约束效应公式
约束效应被视为作用在船体上的外力和力矩,可直接包含在方程式(4)–(6)的RHS(右侧)中。计算采用模型[9],分解如下:
(12)
上标“”表示前进速度的影响,“”表示船舶推进的影响,“HP”表示前进速度和推进的耦合影响。Vantorre的模型缺少纵向力的表达式,这将在后面介绍。式(12)的RHS中的项写成:
(13) (14) (15) (16) (17) (18)
式中,是水密度。为回归系数,见[8]。是基于船的长度的弗劳德数。是航道的有效深度,其中h和是水深和由于深蹲效应产生的平均下沉量。是一个参考速度,定义为:
(19)
式中,是螺旋桨推力,D是螺旋桨直径,和是无量纲船岸距离,定义为:
(20)
(21)
的定义如图2所示。请注意,在以下研究中,船舶和边坡之间的间隔距离,即右舷的初始船舶-边坡距离,是指。在使用Vantorre模型时必须考虑一些限制。船舶的几何形状应满足:0.56 lt; lt; 0.84, 6.0 lt; L/B lt; 7.3, h/Tdgt; 1.07。如果测试条件在以下范围内,则测试条件更好:0 lt; lt; 0.081, 0 lt; lt; 0.79。
<p
剩余内容已隐藏,支付完成后下载完整资料</p
资料编号:[241318],资料为PDF文档或Word文档,PDF文档可免费转换为Word

