
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
两艘无人驾驶船舶拖曳式浮油回收装置的研制:通过比例模型实验进行发展
摘要
漂浮溢油的危害通常是通过一队船拖曳吊杆来解决的,这种行动涉及具体的控制和协调方面。在船上时,一些自动化的建议可能对驾驶员有帮助。此外,尤其是在漏油对人类安全构成威胁的情况下,选择使用无人驾驶的船舶可能会很方便。本文研究了自动牵引臂控制与协调的需求,并且提出了无人驾驶船舶自动控制的使用方法。该研究得到了成比例的拖曳吊杆船舶的模拟和实验的支持,并取得了良好的效果。
一、简介
这项研究的动机与一场环境灾难有关,这场灾难发生在一艘名为“Prestige”的船上,它在西班牙西北部附近沉没,将大量原油溢入大海,并损坏了数百公里的海岸线。电视上不时有报道说,渔夫的船正拖着吊杆。从我们的角度来看,这似乎不是一项容易的任务,我们决定建造两艘按比例缩放的船舶,并对可能发生的情况进行实验研究。在这项研究的基础上,我们的目的是最终实现使用无人艇或船舶的全自动回收操作。
多年前,我们的研究重点是在实验的基础上将移动机器人技术转移应用到船舶上。我们设想了三个自控制级别:有一名驾驶员在船上,有一艘遥控无人船,或只有一艘自主无人船。最后两个级别的小比例实验船的使用对于实验工作是非常方便的。对于甲板上人员,可以在人工干预和自动化操作之间建立某种程度的协作,最低级别的自动化贡献可能是只向驾驶员提供一个建议决策系统。无论如何,考虑最高级别是有用的。因此,我们的研究目标是设计用于吊臂拖曳作业的自主无人船。这种海上运载工具在本文中称为ASV(水面无人船)。
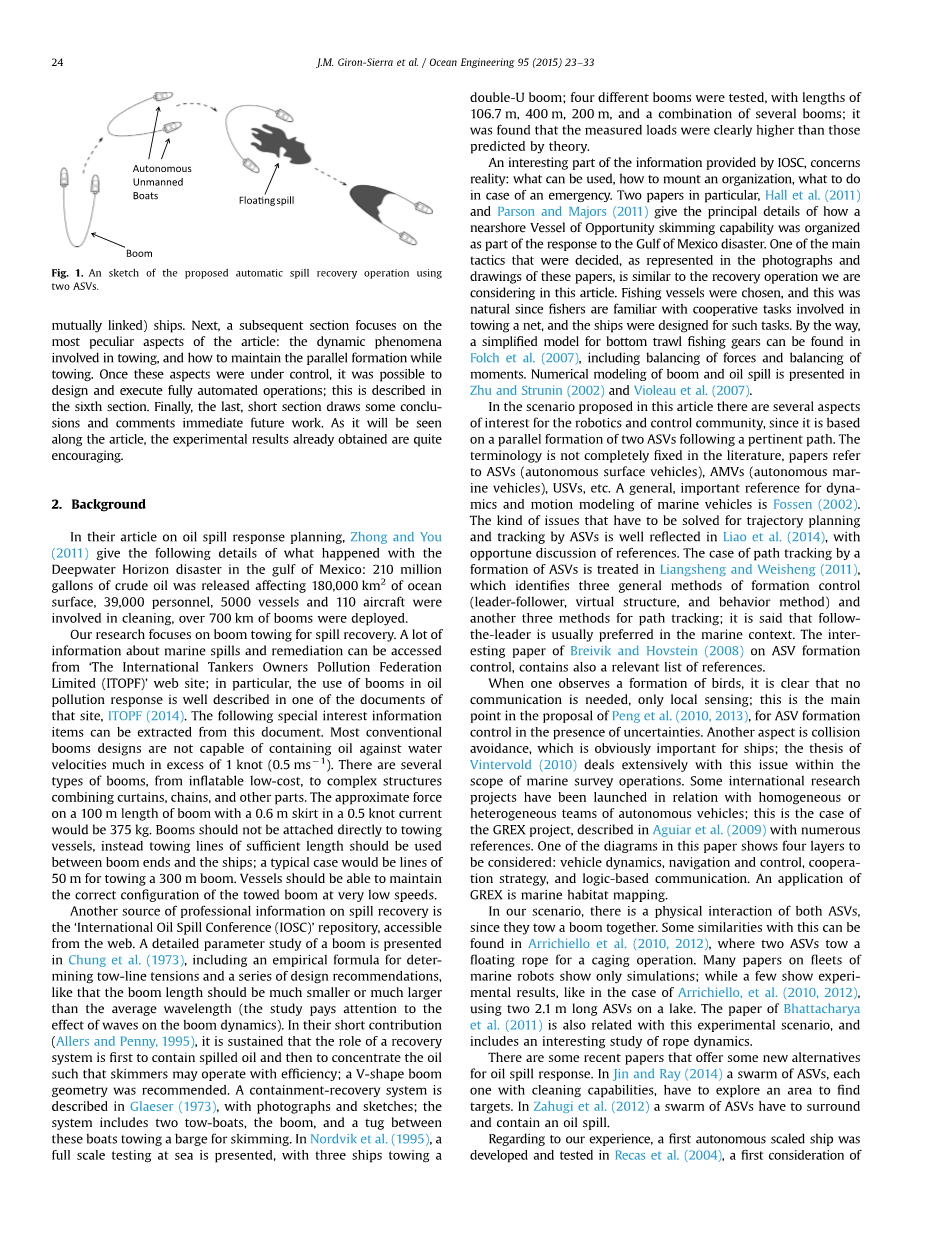
图1说明了要自动执行的操作的类型
我们的实验系统有两个无人船和一个地面站。地面站可以通过数字无线电链路中断车辆的自主行为,并在适当的时候用于远程控制。然而,这不是通常做法的。通常,地面站是在实际操作开始前,向船舶发送航路点或其他行为规范,然后保持被动模式,只是接收来自船舶的数据。
该操作在开始前自动计划。该系统只需要三个方面的信息:来源、漂浮溢油和最终目的地。
一旦作业开始,无人船将吊杆拖向目标,最大限度地减少拖力,在目标附近,无人船队散开、前进,最后靠近,限制泄漏;然后船队向目的地移动。在操作过程中总是可以修改计划。
研究在一步步进行,每个阶段都有实验来验证。第一个任务是建立实验系统,并建立一个适当的运动控制的无人船。然后,对编队控制方面进行了研究。在那之后,研究会集中在吊杆牵引上,进行了许多不同的实验。不出所料,在研究过程中出现了一些控制问题,主要与保持编队按计划运行有关。由于拖力和通过吊杆连接的船舶之间的物理联系,这和保持自由船的平行编队不是一个问题。
图1.使用两个ASV的提议的自动溢出恢复操作的概述
本文的顺序基本上反映了刚才所描述的步骤的顺序。在考虑了本研究的背景后,本文介绍了以无人船和地面站为核心的实验系统,并着重研究了无人船在个体水平上的运动控制。文章下一部分讨论如何获得自由(非相互关联)船舶的平行编队。接下来的章节将集中讨论文章最独特的部分:拖航过程中的动态现象,以及如何在拖航过程中保持平行编队。一旦这些方面得到控制,就可以设计和执行完全自动化的操作;这将在第六节中描述。最后,在文章的最后一节,对今后的工作进行了总结和评价。从文章中可以看出,已经取得的实验结果是相当令人鼓舞的。
二、背景
钟和游(2011)在他们关于溢油应急计划的文章中详细描述了墨西哥湾“深水地平线”号灾难发生的情况:2.1亿加仑原油泄漏,影响到18万平方公里的海面,3.9万人、5000艘船只和110架飞机参与了清理,超过700公里吊杆投入使用。
我们的研究主要集中在溢油回收的吊杆拖航。有关海上溢油和补救措施的许多信息可从“国际油轮船东污染联合会有限公司(ITOPF)”网站上获取;特别是该网站的一份文件《ITOPF(2014)》,详细描述了在应对石油污染中使用围油栏的情况。在本文中可以提取到以下特殊兴趣信息项。大多数传统的吊杆设计都不能在超过1节的水流速度下纳油。现在有几种类型的吊杆,从低成本的充气吊杆,到结合链条和其他部件的复杂结构。在0.5节的水流中,100米长的吊杆和0.6米长的裙板上受的力大约为375公斤。吊杆不应直接连接到拖船上,而应在吊杆端部和船舶之间使用足够长的拖绳;典型的情况是50 m的拖绳用于拖拽300 m的吊杆。船舶应能在非常低的速度下保持牵引臂的正确配置。
关于溢油回收的另一个专业信息来源是“国际溢油会议(IOSC)”储存库,可从网上查阅。Chung等人对吊杆进行了详细的参数研究(1973),包括确定拖缆张力的经验公式和一系列设计建议,例如吊杆长度应比平均波长小或大得多(研究关注波浪对吊杆动力学的影响)。在他们(Allers和Penny,1995年)的些许贡献中,人们认为,回收系统的作用首先是控制溢出的石油,然后集中石油,以便撇油器能够高效运行;人们建议采用V形起重臂结构。Glaeser(1973)中描述了一个安全壳回收系统,附有照片和草图;该系统包括两条拖船、吊杆和拖船之间的拖船,拖船拖曳驳船进行撇渣。1995年,Nordvik等人在海上进行了一次全尺寸试验,三艘船拖曳了一个双U型吊杆;对四个不同的吊杆进行了试验,长度分别为106.7 m、400 m、200 m,以及几个吊杆的组合;结果发现,实测载荷明显高于理论预测值。
IOSC提供的信息中有一个有趣的部分涉及到现实问题:什么可以使用,如何建立一个组织,在紧急情况下应该做什么。特别是在两篇论文中,Hall等人(2011)和Parson and Majors(2011)给出了作为应对墨西哥湾灾难的一部分措施,如何组织具有机会掠过能力的近岸船只的主要细节。在这些文件的照片和图纸中,所确定的主要策略之一与我们在本文中考虑的恢复操作类似。渔船被选择是自然的,因为渔民熟悉拖网的合作任务,而船舶正是为这类任务而设计的。另外,Folch等人还提供了底拖网渔具的简化模型(2007),包括力的平衡和力矩的平衡。朱和斯特林(2002)和维奥莱奥(2007年)等人对起重臂和溢油进行了数值模拟。
在本文提出的场景中,我们对机器人技术和控制集群的几个方面很感兴趣,因为它是基于两个ASV按照相关路径并行形成的。该术语在文献中并不是完全固定的,论文中提到了自动水面船舶(ASVs)、自动海事船舶(AMVs)、USVs等。Fossen(2002)是船舶动力学和运动建模的一个通用的重要参考文献。在无人船的轨迹规划和跟踪中需要解决的问题在廖等人的研究中得到了很好的反映(2014),并且适当讨论了参考文献。在Liangsheng and Weisheng(2011)中讨论了由无人船编队进行路径跟踪的情况,确定了编队控制的三种一般方法(领队-跟随、虚拟结构和行为方法)和另外三种路径跟踪方法;在海洋环境中,领队通常是首选的。Breivik和Hovstein(2008)关于ASV编队控制的有趣论文也包含了相关的参考文献列表。
当观察到鸟类的形成时,很明显不需要交流,只需要局部感知;这是彭等人提出对于存在不确定性的ASV编队控制的主要观点(2010年,2013年)。另一个方面是避碰,这显然对船舶很重要;Vintervold(2010)的论文在海洋调查作业范围内广泛地讨论了这个问题。一些国际研究项目已经启动,涉及同质或异质的自主运载工具团队;这是GREX项目的情况,如Aguiar等人所述(2009),该项目参考文献众多。本文中的一个图表显示了需要考虑的四个层次:车辆动力学、导航和控制、协作策略和基于逻辑的通信。GREX的一个应用是海洋制图。
在我们的场景中,两个ASV一起拖动一个吊杆,所以它们之间存在物理交互。Arrichiello等人发现了一些与此类似的现象(2010年,2012年),其中两个无人船牵引一根浮绳进行一次拦截作业。许多关于海洋机器人舰队的论文只展示了模拟;而一些论文展示了实验结果,如Arrichiello等人的案例(2010年,2012年),在湖上使用两个2.1米长的无人船。Bhattacharya等人的论文(2011)也与这个实验场景相关,包括对绳索动力学的研究。
最近有一些论文为应对漏油事件提供了一些新的选择。在Jin和Ray的论文(2014)中,一大群具有清洁能力的无人船必须探索一个区域以找到目标。在Zahugi等人(2012)的文章中一群无人船必须包围并控制漏油。
根据我们的经验,在Recas等人的研究和试验中,开发了第一艘自主缩放比例的船舶(2004),在Jimenez和Giron Sierra等人的研究中,首先考虑了ASV对溢油的限制(2005)。Leon等人和Giron Sierra等人首次提出了溢出实验(2006)。Giron Sierra等人考虑了ASV团队的路径规划(2008)。Carrillo等人提出了一个模拟环境(2008)。Pereda等人概述了溢油回收作业的主要步骤(2011)。为了获得本文所述的结果,有必要进行长期的开发和实验工作。
三、实验系统
成比例的船舶通常被用于研究和测试,正如在马德里附近的大学的拖曳水池设施中的水动力实验通道。该设施的服务和经验对我们的研究项目非常有用。根据实验目标的不同,选择使用较大或较小尺度的船舶,以及呆在室内实验(例如带有造波器的水池)或去较大的露天环境(例如水坝)实验都很方便。在所提出的溢油回收操作的情况下,实验的目标是可视化真实的行为,这些行为更多地与操纵有关。因此,观测是容易的,所以使用小型船舶是可行的。这样,虽然恢复操作需要空间,需要露天环境,但在可视范围内进行实验是可实现的。
为这项研究开发的实验系统有两个小规模的无人船和一个地面站。它是一个分布式机器人系统,没有中央大脑控制机器人,也没有人类进行远程控制,每个ASV决定自己的行动。一旦到达目的地,就会与地面站取得联系。
两个ASV是相似的:带有一个外侧马达。图2示出了其中一个ASV的照片。船体是按照1/15比例,由Kehrer Modelbau在柏林制作的。该船长0.8米,当电池和电子产品在船上时重3.9公斤。推进系统基于700奈德直流电动机,最大速度约为1.8米/秒。船舶没有方向舵,航向控制是
通过移动带RC随动系统的舷外马达来完成的。ASV配备有两个盒子,其中包含随动系统、车载微型计算机、数字罗盘和用于速度控制的接口电子设备。
图2.一个ASV的照片
船载电子系统包括我们开发和制造的一个小型板,带有ARM微控制器、GPS接收器和数字无线电链路。GPS贴片天线和数字指南针在板的外部。图3示出了船载电子系统的框图。
PWM(“脉冲宽度调制”)信号是公认的标准,因此它们也可用于大型随动系统系统和强大的速度控制器。在实船里,相同的PWM信号将能够控制速度和航向。同样,实船也可以使用我们在无人船上使用的同样的指南针和全球定位系统。因此,我们的电子系统同样适用于实船。
船载控制软件用C语言编写,由主控制回路组成,主控制回路接收来自船载传感器的数据,并计算速度和航向控制信号的数值。控制回路定期执行,每秒10次。图4示出了基于两个比例积分微分(PID)控制器的ASV反馈控制的概述。控件的选择是根据所需的路径和速度。GPS和数字罗盘提供相关位置、速度和航向角的信息。
地面站的软件也是用C语言开发的。任何实验都包括四个步骤:准备、设置、执行和结果分析。地面站用于设置和采集实验过程中的实时数据。该设置由一系列与所需路径和运动控制参数(例如速度)相关的设置规范组成。在实验过程中,无人船向地面站发送实验监测和结果分析所需的数据。图5示出了地面站和船舶之间的相互作用的示意图。
当然,在出现意外问题时,操作员可以手动控制ASV。而且,地面站可以处理多组ASV牵引臂。
如果天线离地10米,使用的数字无线电链路可以达到5.6公里。我们做的实验离地面站不到200米。
我们开发了一个模拟环境,其目标有两个:实验准备和结果分析。
模拟环境的一个选项是在绘制ASV运动的GPS轨迹时使用谷歌地图作为背景。
图3.船上电子系统框图
图4.ASV运动控制系统概述
四、独立导航控制
船舶应遵循的常规路径规范包含在航路点列表中。然而,在路径为圆弧的情况下,一系列的航路点不是一个好主意。因此,我们决定使用Dubins路径,该路径由直线和圆弧组成,如图6所示。这是移动机器人学中的经典方法(La Valle,2006)。路径由一系列中心和半径指定。
图5.地面站与ASV之间的相互联系 图6.Dubins路径的示范
图7.直线路径段上的对应控制变量
航向控制基于横向误差和航向误差。横向误差是相对于期望路径测量的。在图7中描述了当船应该沿着一条线行驶时的情况。
船舶重心的位置,在图7中表示为“C”,投影到指定的路径上,给出点“P”。“P”和“C”之间的距离是横向误差“elat”。前一个“P”点保持为“ref”。当前相对于北方的航向角为“currh”。路径指向指定的航路点“W”:在平行编队中,需要保持恒定的横向误差,因此船舶平行于路径移动。这意味着需要相对于北方的航向角“h”,可能出现与所需角度相关的误差;图7显示了存在航向角度误差“eh”的情况。
从图7可以看出:
(1)
其中,Wx和 Wy是点W的x和y坐标,以此类推,其余的点都
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[241314],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

