
英语原文共 16 页
摘要:
在未来,自动驾驶汽车(AVs)将被引入公共道路,这就意味着传统汽车和自动驾驶汽车共享城市空间。目前,从行人在现实环境中的角度出发,对行人与自动驾驶车辆之间的相互影响了解很少。行人可能不知道自己面对的是哪种类型的车辆,这可能会导致行人产生压力,以及改变行人过马路的决定。例如,行人可能会表现出高度紧张和保守的过马路行为当自动驾驶汽车的'司机'没有眼神交流,而仅是执行驾驶任务时。同时,也有可能行人认为自动驾驶汽车总是会让步(导致短的临界间隙)。本研究旨在确定行人在与自动驾驶汽车互动时与传统车辆互动时的过马路决定。我们在一个封闭路段进行了一项研究,参与者(N = 24)在一个主题内设计中遇到了《wizard of oz》自动驾驶汽车和传统的车辆。在《wizard of oz》的设置中,当乘客通过操纵杆驾驶汽车时,一个假的“司机”坐在驾驶座上。关于车辆二十场景进行了研究条件(传统的车辆,汽车司机在看报纸的车,粗心的司机在一辆车顶有'自动驾驶'标志的车,粗心的司机在车辆的引擎罩和门上有'自动驾驶'标志的车,司机很活跃的车),车辆行为(停止与不停止),和方法(左和右)方向。参与者按随机顺序经历了每个场景一次。这允许评估参与者的行为时,第一次与自动驾驶汽车互动(没有以前的培训或经验)。实验后的采访表明,大约一半的参与者认为汽车(有时)是自动驾驶的。测量参与者的关键差距即自我报告的压力水平,两者在车辆状况上并无显著差异。然而,实验后的结果表明,大多数参与者确实感知到了车辆外观上的差异,并被报道受到这些特征的影响。未来的研究可以采用更精细的行为测量方法,比如眼球追踪,来确定行人对自动驾驶汽车的反应。此外,我们建议检查动态的自动驾驶汽车与行人沟通的有效性,如人工灯光和手势。
1.导言
1.1.行人和自动车辆的混合交通
在欧洲,约26%的道路死亡与行人有关(世界卫生组织,2015年)。这些死亡大多发生在行人试图在城市环境中横穿马路时(例如,欧洲联盟委员会,2016年;SWOV,2010年).
自动车辆(自动驾驶汽车)可能会通过更换容易出错的司机和可靠的计算机来降低这些事故率。然而,在未来几十年里,将出现传统车辆和无人驾驶车在道路上行驶的混合交通情况,这给安全带来了不确定性(sivakamp;schoettle,2015年)。除非建立完全隔离的车道,否则车辆将与行人和骑自行车者等弱势道路使用者共用道路。在交通中部署自动驾驶汽车之前,应评估和保证行人安全.
目前,许多研究人员关注的是计算机算法的发展,这些算法能够在自动驾驶汽车上使用摄像头探测行人(ohn-baramp;trivedi,2016年)。此外,还对自动驾驶汽车内的司机如何控制进行了大量研究,例如,当行人进入道路时,发生了另一种危险(例如,Dewinter、stanton、Price、amp;mistry,2016年;Gold,dambouml;ck,lorenz,amp;bengler,2013年)。然而,关注行人本身的研究也至关重要,因为行人可能会改变他们对自动驾驶汽车的行为.
1.2.行人与自动化车辆之间的互动挑战
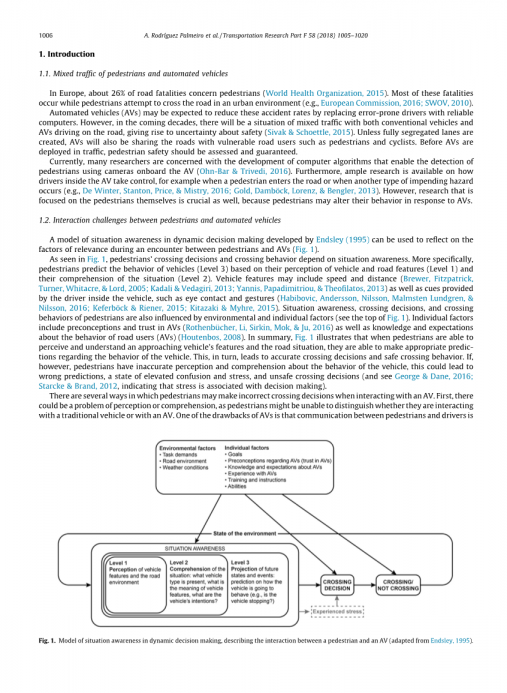
Endsley(1995年)开发的动态决策中的情况意识模型可用于反思行人和自动驾驶汽车之间的关联因素(图1).
正如所见图1、行人的穿越决策和穿越行为取决于情况意识。更具体地说,行人根据对车辆的感知来预测车辆(3级)的行为和道路特征(1级)和他们对情况的理解(第2级)。车辆特征可能包括速度和距离(布鲁尔、菲茨帕特里克、特纳、惠塔克、amp;Lord,2005;卡达利amp;韦达吉里,2013年;Yannis,Papadimitriou,amp;Theofilatos,2013年)因为我们l作为司机在车内提供的线索,如眼神交流和手势(哈比博维奇安德松,尼尔森,马尔姆斯滕伦德格伦,amp;Nilsson,2016;凯夫尔博克amp;里纳,2015年;北崎amp;Myhre,2015年).情况意识、交叉决策和交叉行人的行为也受到环境和个人因素的影响(见图1).个别因素包括对自动驾驶汽车的先入为主的观念和信任(罗滕布彻李西尔金,莫,amp;Ju,2016)以及知识和期望。道路使用者(自动驾驶汽车)的行为(胡滕博斯,2008).总之,图1说明,当行人能够感知和了解接近车辆的特征和道路情况,他们能够作出适当的预测车辆的行为。这反过来又导致准确的交叉决定和安全的交叉行为。然而,如果行人对车辆的行为有不准确的认识和理解,这可能会导致错误的预测,一个上升的混乱和压力的状态,和不安全的交叉决定(见乔治amp;Dane,2016;斯塔克amp;Brand,2012年,表明压力与决策有关)。
在与自动驾驶汽车交互时,行人可能会通过多种方式做出不正确的交叉决定。首先,可能存在感知或理解问题,因为行人可能无法区分他们是与传统车辆互动还是与自动驾驶汽车互动。自动驾驶汽车的缺点之一是,c行人和司机之间的交流是
图1。动态决策中的情况意识模型,描述行人与自动驾驶汽车之间的相互作用(改编自endsley,1995年).
并不总是可能的,因为自动驾驶汽车的驱动程序可能正在执行非驾驶任务,因此不注意道路(北崎amp;Myhre,2015;罗滕布彻等人,2016年).这意味着行人可能无法区分乘坐传统车辆的注意力分散的司机和执行非驾驶任务的自动驾驶汽车司机,如看报纸。其次,行人可能对自动驾驶汽车有错误的信任,或者因为没有以前的情况而对自动驾驶汽车的行为抱有不正确的期望在涉及这类车辆的交通情况下的经验。例如,如果行人认为驶近的车辆是自动驾驶的,他们可能会接受一个短暂的缝隙,因为他们相信自动驾驶汽车在所有情况下都会屈服。相反这是有可能的,行人会实际上交叉有很大的差距,因为他们不信任自动驾驶汽车的能力。
对情况意识问题的一个可能的补救办法是使自动驾驶汽车明确识别,例如通过外部标志'自动驾驶汽车'(hazenzieker等人,2016年)。虽然这样的标志可以缓解感知和理解的问题,但一个符号也可能导致混乱,因为外部符号的存在并不能保证自动驾驶汽车自动驱动那个特定的时刻.
总之,未来的自动驾驶汽车可能是明确可识别的(通过标志)或无法识别(但仍然包括分心的驱动程序)。这两种情况都可能会让行人感到困惑和压力,并可能导致改变的cd决策,如图1所述。因此,重要的是要分析的影响,行人的差距接受,以及主观经验的压力水平和视觉线索,在决定交叉。
1.3.关于行人-自动车辆互动的上一次研究
迄今为止的数量对脆弱道路使用者和无人机之间的相互作用进行了研究(例如,布劳,2015年;城市移动2,2016;沙里西,哈比博维奇,Andersson,Li,amp;Evers,2017;Cl阿曼,奥伯特,amp;Cummings,2017;哈比博维奇2016年;马尔姆斯滕Lundgren等人,2017年;罗滕布彻等人,2016年).
Clamann等人(2017年)对行人对Wizard of OZ自动驾驶汽车的反应时间进行了实验,该向导携带了一个显示信息的正面标志(例如,'行走'、'不要行走')。这些作者的结论是,在决定是否横穿马路时,差距距离等遗留行为比自动驾驶汽车上显示的信息更重要。罗滕布彻等人(2016年)还使用了Wizard of OZ方法来评估行人在没有明显驱动程序的情况下与自动驾驶汽车交互时的行为。在一项自然主义的研究中,作者用汽车座椅服装来掩盖司机,并测量行人对车辆的反应行为。结果显示,行人确实注意到汽车没有司机,但行人被发现是'惊讶,没有任何沟通线索,有能力管理这种违反正常的行为'(第801页).
Lagstrouml;mamp;malmstenLundgren(2015年);(另请参见马尔姆斯滕Lundgren等人,2017年)进行了一项实地研究,对13名参与者的穿越意愿进行了评估,评估出他们遇到了传统车辆或Wizard of OZ自动驾驶汽车。为了创建这个Wizard of OZ设置,作者在右手操纵的汽车中使用了一个虚拟方向盘,而真正的方向盘被隐藏起来,使汽车看起来是一个左手钢红色的行人.测试了不同的车辆行为(停车、不停车)和不同的司机行为(眼神交流、电话、报纸、无司机)。作者发现,大多数遇到自动驾驶汽车的行人,车轮后面没有疏忽的'司机'或没有司机,他们报告不愿意穿越。相反,所有参与者在与司机有眼神接触时,都会愿意横穿马路。作者建议,通过外部车辆显示向行人提供信息可能是有益的。因此,作者还演示了挡风玻璃上部的led条,它向外部交通传达了自动驾驶汽车是否处于自动驾驶模式并即将屈服(lagstrouml;mamp;MalmstenLundgren,2015年)。类似的自动驾驶汽车原型已经生产了日产(led显示显示#39;后你')和戴姆勒(斑马过境投射到道路上).
其他研究使用问卷或访谈来确定遇到自动驾驶汽车的弱势道路使用者的信息。布劳(2015年)使用了在线调查问卷,从中得出结论,与与传统车辆互动相比,参与者在与车辆进行互动时更喜欢隔离的基础设施。哈格恩齐克尔等人(2016年)进行了问卷调查,从自行车手的角度向参与者展示了传统车辆和有不同外部标志('自动驾驶汽车')的自动驾驶汽车的照片。作者发现,关于车辆是否注意到或将为他们停车的参与者的确定性程度,自动驾驶汽车和传统车辆之间没有统计上有意义的差异。弗里德曼等人(2017年)利用200名通过人群招募的参与者进行了一项调查研究一声受访者对安装在汽车前部的30个车辆对行人展示概念进行了评级。作者观察到,简单的指示(如绿色行人、绿色文本'走'、红色文本'不走')最能说明它是是否行走,而某些概念(如箭头、圆圈等)是更暧昧。根据一项访谈研究,kitazaki和myhre(2015年)提供了一份关于行人和自动驾驶汽车之间沟通的8项暂定建议清单。例如,他们建议,自主车辆应在车辆车身上表明自己的身份,以便其他人能够对无人机形成理解和信任。然而,目前,关于日常生活环境中的自动驾驶汽车-pedestrian相互作用的研究仍然很少.
1.4.本研究的目的
如上所述,行人与车辆之间的互动是基于行人对车辆特征(如速度、距离)的解释和与司机的沟通。此外,道路使用者的行为符合他们期望其他道路使用者的行为方式。当在道路上引入自动驾驶汽车时,与司机的沟通可能并不总是可能的,行人对自动驾驶汽车的意图可能会有不正确的期望。此外,传统和新的自动驾驶汽车的混合可能会共享道路,行人可能无法区分它们与哪种类型的车辆相互作用。这可能会造成基座对车辆或交通状况的感知和理解问题,导致对车辆行为、压力和行人穿越决定变化的错误预测(见图1)).因此,本研究的目的是分析接近自动驾驶汽车对行人穿越决策的影响。讨论了以下研究问题:(一)行人的穿越决定在遇到自动驾驶汽车和遇到传统车辆之间是否不同?不同的自动驾驶汽车的前永恒的功能('自动驾驶汽车'标志,司机的注意力状态)?
在一个真实的交叉环境中进行了实验,参与者(行人)遇到了一个接近的车辆,有不同的乘员行为(细心、漫不经心、看报纸)和不同的标志(车顶标志#39;'自动驾驶汽车',车门标志'#39;自动驾驶汽车',无标志)。这两个条件与标志选择了基于照片的问卷研究哈格泽克尔等人(2016年)。我们在司机正在看报纸时增加了一个场景,车辆没有配备任何类型的外部标志(另见habibovic等人,2016年)。这些操作的想法是评估在自动驾驶汽车中可能存在的特征信息的影响。与会者没有事先获悉车辆地雷的存在,以测试今后可能出现的情况,即在道路上引进了车辆,没有向道路使用者提供培训.
自动驾驶汽车是使用Wizard of OZ装置驱动的(dahlbauml;ck,jouml;nsson,amp;ahrenberg,1993年;哈比博维奇等人,2016年),即一个假的'司机'坐在车轮后面(例如,执行非驾驶任务,如看报纸),而车辆实际上是由乘客通过操纵杆控制的。行人的过境决定是根据从视频图像和GPS记录中提取的缝隙接受度来界定的。此外,还要求参与者填写调查问卷,以评估其决策中考虑的因素以及与车辆互动后的感知压力程度.
2.方法
2.1.参加者
德尔夫特技术大学通过不同院系和主要营地的海报、传单、个人征聘和社交媒体的帖子征聘了24名学员。参与者的人数受到限制,限制了道路可以禁止其他车辆进行实验的天数和时间.
参与者为9名妇女和15名男子,年龄在19至30岁之间(m=24.50;Sd=2.95)。参与者有不同的国籍,但要求他们来自一个车辆在右侧行驶的国家(左侧的方向盘)。最终,来自左侧车辆行驶的国家的4名参与者被包括在内,因为他们在荷兰居住几年后,被用来与在右侧行驶的车辆互动。对参加实验者的其他要求是年满18岁,英语掌握得很好.
在招募过程中,向与会者解释说,他们将参加一项研究,目的是分析行人和车辆之间的相互作用,而不是通知他们Wizard of OZ计划参与了实验。所有参与者在实地研究结束时都获得了10欧元的礼券奖励,作为对他们在研究中合作的补偿.
这项研究得到了代尔夫特技术大学人类研究伦理委员会和道路安全研究所道德委员会的批准,条件是行人不会横穿马路。让行人走上马路也没有结婚。因此,行人必须以不同的方式(即向前一步、向后一步)表明他们的过境意图。所有与会者均提供书面知情同意.
2.2.地点和安全程序
实验是在代尔夫特科技大学校园的边缘进行的。在试验期间,道路被封闭,以确保安全。道路堵塞是通过设置围栏和标志造成的。此外,在试验期间,一名保安在场,阻止其他道路使用者进入道路。这条道路由两条车道和两条停车车道组成。路的一边有一条人行道。没有人行横道设施(图2)。为确保所有参与手术的人员的安全,坐在驾驶座上的人可以在紧急情况或操纵杆出现问题时立即恢复对车辆的控制。然而,这种情况在实验期间并没有发生.
2.3.独立变量
第一个不变的是车辆的外观。一辆制服(白色丰田普锐斯)被用来防止由于车辆类型或颜色的原因而对参与者的行为产生偏见。车辆的外观是根据以下五个条件之一确定的:
资料编号:[5914]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

