英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
摩托车驾驶时的手部压力手套传感系统
摘要
摩托车骑行中手部力的精确测量是安全骑行研究的重要内容。本文实现了一个力检测手套系统,用于实时测量摩托车骑行过程中的手部力,目的是为骑手提供反馈。它由一副手套组成,手套上装有触觉传感器,并通过无线智能手机进行数据采集。一个新的校准方法被开发为一种考虑自然操作和环境下测力的动态标定方法。因此,一系列的数据分类算法保证了摩托车骑手准确的手感反馈。反馈数据可能会提醒乘客预测和预防事故。验证试验表明,该力检测手套系统具有很强的应用潜力,可作为实际环境中手部性能监测的工具。
1介绍
骑摩托车在很大程度上是一种愉快和令人振奋的体验,而其固有的一个方面是发生事故的高风险[1]。对事故主要原因的深入分析表明,52%的事故源于驾驶员失误[2]。造成这些统计数字的主要因素是人的感知和决策失误,因为摩托车市场继续成熟,对改善安全性的需求增加,导致了发展最佳驾驶控制的需求。不幸的是,通常认为可以降低伤害风险的安全措施和条件可能并不总是如预期的那样发挥作用。特别是,骑手除了驾驶摩托车外,还非常依赖手来控制油门、前制动器和离合器。这些控制输入将显著地改变摩托车在行驶过程中的动力,使得微小的变化可能导致失控。因此,评估手的灵巧性能与环境中的活动有关,提供了宝贵的生物力学信息[3]。
近年来,基于手套的测量系统已成为手部性能评价的主流。大多数系统包括非接触式位置测量装置(通常是磁性、超声波或光学的),用于跟踪手的运动。此外,执行器可以用来传递触觉的力;此外,一个有趣的测量是在操作仪器或工具时施加到仪器或工具上的力[4]。在更自然的环境中进行测量将提高各种干预措施的效率[5]。尽管存在不同类型的力传感器,但触觉传感器是薄的、轻的和灵活的,使其成为集成到可穿戴技术中的理想选择,据报道,可穿戴技术在应用中更为高效和用户友好[6]。放置在手套指尖上用于测量表面硬度和压力的触觉传感器可用于感测手指位置[7]和识别不同物体[8]。通常,包含触觉传感器阵列的力手套系统是为抓握力任务而开发的。他们测量最佳圆柱柄直径的手指和指骨力[9],并评估柄形状对优化手动工具的最大拉力的影响[10]。因此,通过摩托车活动,触觉传感器可能是最理想的力传感比任何其他类型的传感器。由于摩托车手套缺乏可靠的信息,继续研究和开发相关设备是极其重要的[6]。
传统上,手部生物力学(运动学和动力学)的精确测量是在实验室进行的。它们通常通过电缆连接到数据采集计算机,从而限制佩戴者在自然环境中的运动。近年来,可穿戴计算作为一种新一代的技术正在迅速崛起,用于无处不在的人类性能监控[11]。性能统计可以激励和允许骑手在训练期间跟踪他们的进度,而训练期间频繁和并发的反馈信息有助于提升骑手的表现。可穿戴传感技术可以为感知和分析人体运动并立即提供反馈的技术设计开辟新的天地。
本文着重研究了在摩托车驾驶过程中为调节手部性能提供实时反馈的力检测手套,这方面的研究还没有得到详细的探索。它是基于手套磨损传感器的发展来区分各种摩托车操作功能,如离合器、油门、制动和转向。我们的工作包括三个方面:(1)利用智能手机内置蓝牙的先进计算能力和无线通信能力,开发了可穿戴的硬件工具,能够自动感知骑手的手部动作。(2) 虽然还没有充分了解力检测手套系统中触觉传感器的性能,但为了可靠地使用力检测手套系统,我们采用了事先正确的校准方法和可靠的力值处理过程。(3) 开发了用于快速评估触觉运动生物反馈性能校正的软件工具。
2实验部分
2.1 力检测手套系统
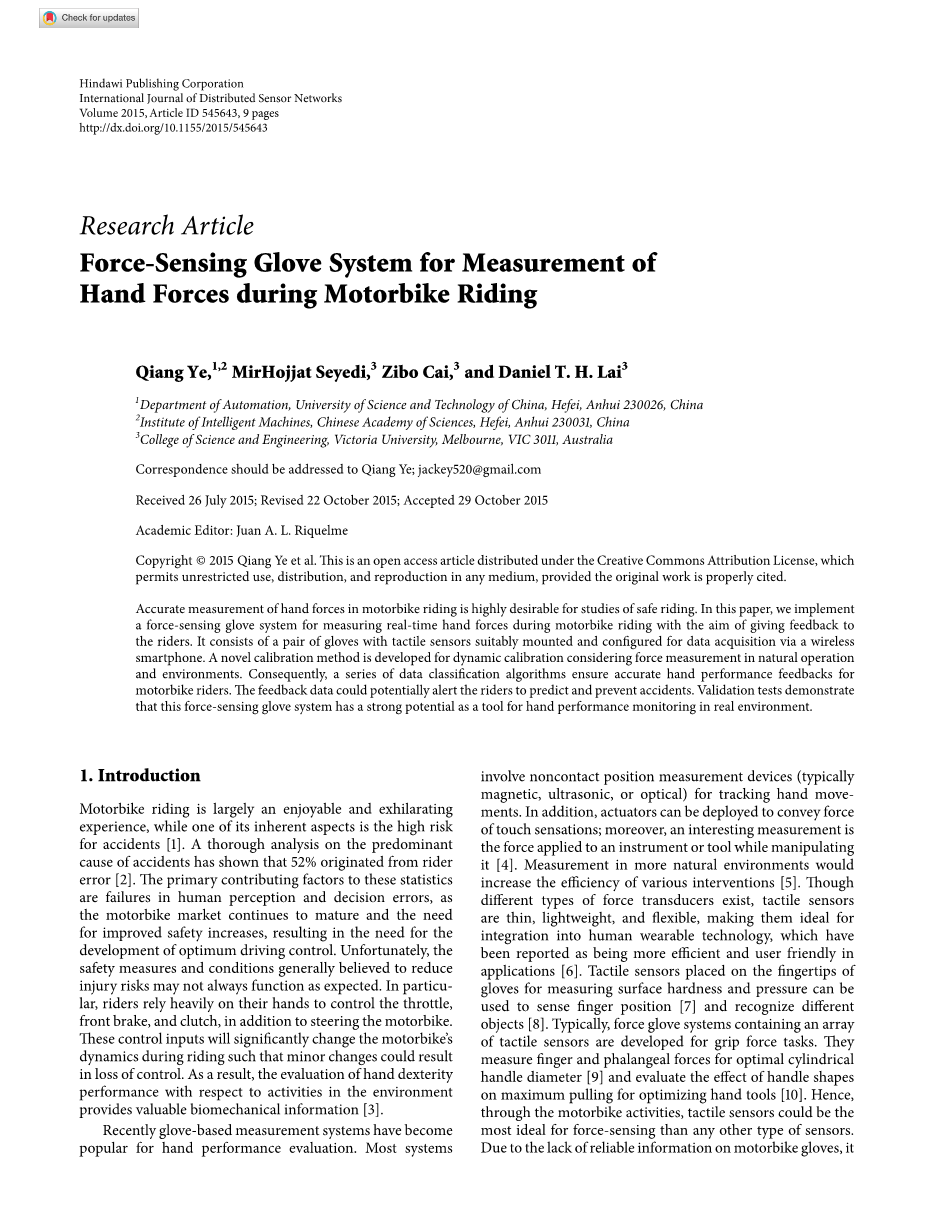
原型系统是一种轻量化的手部性能自动测量装置。该系统由一个便携式子系统和一个远程单元组成(图1)。便携式设备由两个手套和4个触觉传感器组成,每个手套的侧面都连接有触觉传感器,并通过前端电子设备连接到微控制器。传感器安装在手掌和前指上,用于测量骑摩托车时的主要活动。传感器测量的管理分配给微控制器,微控制器执行几个功能:接口和调节来自传感器块的信号以及数据传输。在操作过程中,远程装置(本研究中使用的智能手机)转换、记录和显示接收到的测力数据。
图1:(a)拟议系统的框图(一个手套的四个挠性传感器、带MCF51芯片的B板、C a蓝牙收发器和D a智能手机或笔记本电脑)。(b) 原型机力感手套。
力检测手套系统最重要的要求包括低成本和轻量化的结构、在数据收集期间操作摩托车时的无障碍运动以及手掌的无障碍触觉。在当前配置中,如图1(b)所示,安装了四个A401柔性力触觉传感器(Tekscan,Inc.,South Boston,MA),以测量触觉力。在食指末节指骨(ID)和中指末节指骨(MD)上分别放置两个触觉传感器,用于监测两指制动的活动性[12]。这种制动最常为车手所使用,因为它的好处包括减少制动反应时间和同时使用油门和制动器。它通常能让车手牢牢地控制油门。另外两个力传感器集成在油门周围手套的手掌(P)和拇指近端指骨(TP)上,因此可以从两个力信号观察油门的旋转[3]。A401挠性力传感器是一种商用轻质箔产品,重量仅为0.33克,有效面积直径为25.4毫米,厚度为0.2毫米。所有触觉传感器使用双绞线分别连接到调节/信号处理电路块。可以在一定程度上防止进入或来自电缆的电噪声。所有触觉传感器都通过蓝牙协议与智能手机无线连接。
微控制器是MCF51JM128VLH(德克萨斯州西奥斯汀市飞思卡尔半导体公司)。这种商业化的设备是一个32位精简指令集计算(RISC)微处理器和一个超低功耗微控制器。它的处理器核心速度高达50.33兆赫。工作电源电压介于2.7 V和5.5 V之间。蓝牙收发器为Parani ESD 200D(Sena Technologies,Inc.,San Jose,CA),工作电源电压为3.3 V。蓝牙标准是由国际分布式传感器网络杂志SIG特别提出的,以满足无线传感器网络监控对极低功耗、较低数据传输和大多数手套系统的需求[5]。蓝牙技术可以通过移动设备支持实时和无线的手活动识别。采用的双向传输不加密,是异步的。身份验证和错误检测也没有实现。Parani-ESD200有一个内置的车载天线,并提供一个用于远距离通信的天线连接器。采用蓝牙标准的另一个原因是同时从两个手套进行数据采集。通过Android 4.0版本的操作系统,智能手机可以与蓝牙硬件进行良好的通信,实现无线设备之间的毫秒级同步。
表1:无线手套系统电池电位规格
系统的可穿戴部分重量约为145克(四个传感器 电线:40克,带包装的信号调理电路 电池:105克)。整个系统(包括传感器和信号调理硬件)由锂离子电池供电,这足以进行至少8小时的数据采集。有一些传感器节点连接到身体并记录生理参数,然后将记录的信号无线传输到智能手机、PC或其他计算机。传感器节点的功耗是实现器件尺寸小、使用寿命长的关键因素,进而影响使用的方便性。表1总结了三种可能适用于手套系统供电的典型电池的规格。物理尺寸(如上所述)决定了设备体积和储能能力,通常以毫安时表示。虽然容量较低,但锂离子电池的体积和重量更好。持续时间测试还表明,超过8小时的电池寿命是足够的日常使用我们的手套系统与锂离子电池。因此,锂离子电池是力检测手套系统的最佳选择。
图2:力觉手套实时数据采集接口。
数据采集软件(如图2所示,手套活动的实时监测)也用于硬件设置。通过智能手机软件方便了与系统的人机交互。这四幅图分别展示了摩托车的离合器、刹车、转向和油门。?1和2代表两个力传感器,已根据1s、2s和5s间隔在左栏精确地详述。
两用智能手机软件负责记录从手套收集的数据,并将数据可视化。用户界面是在Android 4.0.4开发环境中使用JDK和eclipse IDE构建的。应用程序能够执行常见的蓝牙操作。原始数据被记录到逗号分隔值(CSV)文件中。该软件整合了触觉传感器的视觉显示;每个手活动的力度用颜色表示,任何紧急事件用声音警报表示[6]。在这项研究中,原始数据采样最初是在20hz下进行的,在其他类似的工作中,通常都建议采样频率[5,13]。
2.2校准实验
力传感手套系统在使用前必须进行校准,以减少误差。大多数现有的力传感手套都是在静态条件下校准的[14]。然而,由于荷载在典型应用中是动态的,因此在本研究中动态测量是必不可少的。这里的校准测试包括静态和动态协议。
2.2.1静态校准实验
在此过程中,为了通过无线连接获得所施加的力与力传感手套的输出数据之间的关系,在一个带有触觉传感器的称重传感器上施加重量载荷。施加的力每0.5kg连续变化,从0kg增加到5kg,然后减小到0kg。由于最大单指力约为50N[9,10],因此,5kg被认为是传感器测量的极限负载。试验重复了10次。以20赫兹的采样率收集力传感手套系统的测量值10秒。卸下重物后,在下一次试验前休息2分钟,以消除传感器漂移的任何影响,这可以通过考虑振幅和环境变化来评估。
2.2.2动态校准实验
在校准过程中,戴手套的操作员将传感器直立放置在称重传感器上,并平稳地施加持续变化的力。称重传感器(Xtran称重传感器S1W力传感器,澳大利亚墨尔本Applied Measurement Australia私人有限公司)用螺钉固定在隔振台上。称重传感器的数据通过放大器(图3(a))[15]传输至NI USB-6002数据采集适配器(美国奥斯汀国家仪器公司),然后由NI LabVIEW signal express 2013软件(美国奥斯汀国家仪器公司)以20赫兹的频率上传和记录,与力传感手套的采样频率相同。然后,力传感手套系统的测量与相应的称重传感器测量同步(图3(b))。数据流同步通过用第一个手指轻敲确认,以便来自力传感手套和称重传感器的传感器数据流中的大尖峰标记测量流的开始和/或结束。与传统静态测量中的手动操作不同,力传感手套和称重传感器的数据流是在同一窗口中同步自动采集的。一个优点是它避免了操作错误。
由于触觉传感器本质上对压力有反应,因此必须通过引入中间活化剂表面来限制(使其保持恒定)接触区域。有必要为力传感手套系统提供一个接近真实环境的接触区域。法国达索系统公司使用SolidWorks 2013开发了一个模型(图3(c))捕捉摩托车把手或离合器的真实几何特征,然后用ABS塑料进行3D打印。这个真实的实体模型被固定在称重传感器的工作板上(图3(d))。借助三维打印模型,将被校准传感器的传感区域完全覆盖,实现了可靠的校准。
四名健康受试者,年龄28-40岁,手部无运动障碍,参与了校准和可靠性研究。所有受试者都收到了所有程序的口头和书面说明。对与每个传感器匹配的每个受试者进行校准。受试者熟悉仪器并由操作员演示。在每一个测试集中,受试者被要求在一个声学启动信号后连续向称重传感器施加垂直和逐渐增加的压力10个周期。
图3:校准。(a) 测试环境的总体设置。(b) 为了校准力传感器,手指放在一个真实的摩托车刹车三维打印模型的表面。(c) 在SolidWorks中建立离合器模型。(d) 称重传感器采用三维打印模型固定,提供相似的自然环境接触面。
2.2.3数据分析
为了量化准确性和线性,选择了平均差(MD%)和?2指标。?2是测力传感器数据与力传感手套系统数据之间的线性关系程度。MD%是与相应的称重传感器测量值相比的平均差异百分比[16]。采用配对?检验研究了静态试验和动态试验结果之间的差异。描述性数据以平均值和标准差(SD)表示。统计显著性设为?lt;0.05[17]。所有统计分析均使用SPSS软件(20.0版;IBM公司,芝加哥,伊利诺伊州,美国)进行。
2.3力传感手套性能评价
2.3.1手运动识别
我们对触觉运动指令的研究涉及触觉模式的组成,这些模式可用于以直观的方式表示手的运动。基于力传感,我们可以提炼出可以代表特定手部动作的触觉模式的建议。
图4中的算法工作如下。
首先,计算记录在左侧(L)和右侧(R)的ID、MD、P和TP上的传感元件:
, ? isin; {LID,LMD,LP,LTP,RID,RMD,RP,RTP}.
然后,使用最大期望信号的10%的阈值来滤除非接触感测。因此,检测到接触的感应(gt;0.1times;)为
= minus; 0.1 times;
结果,值0成为所有测量的新参考值。然后测量不同位置下的力。
对于制动器和离合器,两个传感器中的每一个都放置在同一方向上并工作。合力?(?)是两个传感器和的振幅组合:
其中,和是来自LID和LMD的离合器活动识别力,而和是来自RID和RMD的制动活动识别力。
对于转向,它绕固定对称轴旋转,其角动量表示为物体惯性矩与其角速度矢量的乘积:
(? ? (?) minus; ? ? (?))? ? Delta;? = ? ? Delta;? ?
式中,??(?)是来自LTP的力,??(?)是来自RTP的力,??是手柄和轴之间的距离,??是一侧车轮的惯性矩,??是转向角速度。
对于节流阀,它也绕着固定的对称轴旋转。但旋转是由摩擦引起的,因此角动量表示为物体转动惯量与其角速度矢量的乘积:
?(? ? (?) ? ? (?))? ? Delta;? = ? ? Delta;? ?
式中:??(?)为RP的力,?(?)为RTP的力,??为节流轮的惯性矩,??为节流半径,??为角速度。
2.3.2验证实验
一名健康受试者参加了下面的测试,他的年龄是22岁,没有手运动障碍。他开着摩托车在一条400米长的直道上行驶,戴着一副测力手套和一台Gopro2相机。骑手以不同的最终速度(60公里/小时、80公里/小时和100公里/小时,在不同的试验中)在起点和终点之间重复试验;每次从静止开始,然后加速到指定的速度。骑手以每种速度重复所有这些动作八次。一部智能手机连接在摩托车的后座
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[239920],资料为PDF文档或Word文档,PDF文档可免费转换为Word

