
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
基于遗传算法与多智能体的拥塞解决机制的研究
Zehua Zhanga, Jiahao Ye, Shuo Cheng
近年来,我国机动车数量迅速增长,其中车辆和道路供求之间的矛盾更加明显。城市交通拥堵问题已经变得越来越突出,并且拥塞解决方法的机制已经出现。目前,中国的交通拥塞控制系统仍然存在很多不足之处。城市道路拥堵现象仍然普遍存在。现有的交通控制系统无法适应复杂的交通网络,也无法缓解交通状况恶化。本文提出了一种多智能体交通控制系统,该系统旨在控制多个相邻交叉路口的红绿灯比,从而提高了交通流的驱动能力。本文从流量控制网络开始,并使用单智能体作为单位。通过多智能体技术,使得每个路口的多智能体之间的信息可以流通,每个智能体可以快速响应并自动适应交通信息的变化。使用遗传算法建立一个可以持续优化的分布式城市交通控制系统。希望通过本文的研究,可有效解决城市道路交通拥堵恶化问题,从而提高车辆通行能力和社会活动的效率。
关键词:交通拥挤;多智能体;红绿灯比;遗传算法。
1简介
1.1研究背景
在社会经济快速发展的同时,人们的生活条件也在不断改善,时间的价值越来越高。因此,私家车已成为许多人的出行方式;运输技术和运输的发展变得流行了。与此同时,也出现了交通拥堵。目前的交通道路跟不上汽车数量的增长,交通拥堵变得越来越严重。它甚至已经成为制约中国城市乃至世界主要城市发展的主要问题之一。
近年来,城市道路交通拥堵逐渐由大城市向小城市甚至是周围的城镇蔓延。尽管许多城市已经采取了相应的措施来建设或扩建城市道路,交通拥堵问题仍未得到很好解决。根据中国统计局年度报告,从1995年到2014年的20年间,中国私家车和乘用车继续增长,平均增速超过10%[1]。
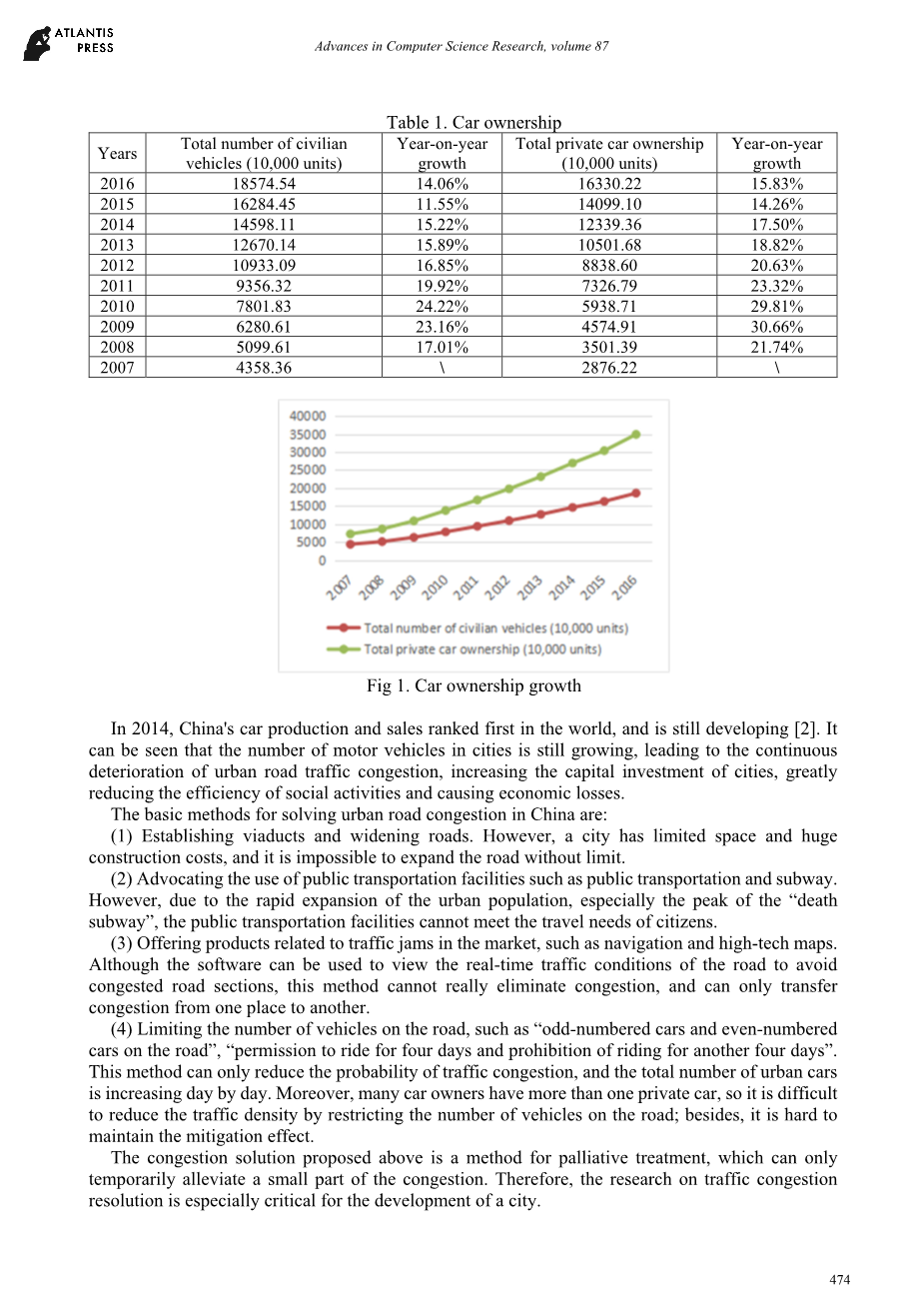
近年来,中国的汽车保有量及其同比增长率如表1所示:
从2007年到2016年的10年间,中国汽车保有量的增长趋势如图1所示:
表1 汽车拥有量
图1 汽车保有量增长
2014年,中国汽车产销居世界第一且仍在发展[2]。可见,城市机动车数量仍在增长,导致城市道路交通拥堵持续恶化,城市的资金投入大幅增加,降低社会活动效率并造成经济损失。
解决中国城市道路拥堵的基本方法是:
(1)修建高架桥和拓宽道路。然而,城市的空间有限,规模巨大,建设成本高,不可能无限扩大道路。
(2)提倡使用公共交通设施,例如公交车和地铁。但是由于城市人口的快速增长,特别是高峰时期的“地铁瘫痪”,公共交通设施无法满足市民的出行需求。
(3)提供市场上与交通拥堵有关的产品,例如导航和高科技地图。尽管软件可以用来实时查看道路的交通状况以避免拥堵路段,但是这种方法并不能真正消除拥堵,只能转移从一个地方到另一个地方的交通拥堵。
(4)限制道路上的车辆数量,例如“单号牌车”和“双号牌车”。“允许行驶四天,再禁止行驶接下来的四天”。 这种方法只能降低交通拥堵的可能性,城市汽车的总数每天都在增长。此外,许多车主拥有不止一辆私家车,因此很难
通过限制道路上的车辆数量来降低交通密度; 此外,缓解效果也很难保持。
上面提出的拥塞解决方案是一种姑息治疗方法,它只能暂时缓解一小部分拥堵。因此,对交通拥挤问题的研究对一个城市的发展尤其重要。
1.2研究目的及意义
城市道路交通拥堵现象越来越普遍,有效解决交通拥堵是当前社会发展的当务之急。智能交通控制系统的使用是目前解决道路交通拥堵的更为有效的方法。它通过控制交通信号,最大限度地提高现有道路设施的使用效率。最大限度利用现有设施,实现资源优化,减少拥堵。
1.3国内外研究现状
尽管国内学者在研究城市道路交通拥堵方面起步较晚,但是在21世纪,他们取得了一定的成就。2005年,严玉龙等人用饱和度作为判断交通路口的状态的指标。基于绿信比的经验优化模型,以交警指挥路口的经验为主,优先使用到交通拥堵较严重的路段。这样的路段就有更多的绿化时间来尽快达到消除交叉路口交通拥堵的目标[3]。2014年,谭飞提出缓解交通拥堵的有效方法是交通智能控制系统,例如SCOOT[4]。
国外学者对城市道路交通拥堵的研究比国内相对较早。自1960年代以来,出现了许多控制方法和策略。在1964年,加齐斯首次根据在道路上行驶的车辆将交叉口状态划分为饱和和非饱和状,并提出了固定信号配时策略来在长绿灯时间下以饱和状态旋转释放流量[5]。这是世界上首次提出交通信号控制的概念。Judd G. A在2001年提出了绿信比的优化方法,以通行容量的车道长度为目标功能,可以有效减少路网的拥堵[6]。2010年,Javier J等人采用遗传算法和集群计算技术对信号进行优化。结果显示,该方法能有效缓解交通拥挤[7]。
SCATS、SCOOT等系统是国外应用最广泛的信号控制系统,并且这些系统在实际应用中都取得了良好的效果。
尽管现有研究已被广泛使用,但在复杂的城市道路网络中,车辆数量大,交通信号灯数量大,突发情况难以快速响应,极大地影响了城市交通信号的优化。
针对现有交通网络存在的问题,本文提出了一种基于多智能体技术的遗传控制算法。遗传算法可以在流量变化时进行快速计算和自适应调整,调整交通信号灯的持续时间,提高交通流的绿色信号比,从而改善各个交叉路口的车辆通行能力,从而减轻交通拥塞恶化的问题。
2.交通拥堵控制原则
2.1交通拥堵的定义
目前,世界上对交通拥挤还没有一个准确、具体的定义。一般的定义是,交通拥堵是由在一定时间内超过道路网络本身容量的道路交通流量引起的车辆排队现象[8]。
2.2现有的交通控制系统及其缺点
目前,世界上使用最广泛的交通拥堵控制系统主要包括SCATS系统和SCOOT系统,但是它们的控制效果有限,无法很好地适应当前的城市道路交通拥堵。 主要原因如下。
SCATS系统是典型的方案选择时序控制系统[9],它准备了四个每个路口的绿色信号和红色信号比率方案,用于实时选择。因此,SCATS具有明显的局限性。 当路况改变时,系统选择与当前情况相适应的绿信比。但是,在交通变化的情况下,计划时间相对较短,效果不好,交通拥堵只能暂时得到缓解。因此,SCATS的方案选择系统是一个有限的滞后系统且容量有限,并且无法快速解决交通拥堵。
图2 SCATS 拥堵策略图
SCOOT是基于方案的路网控制系统,可优化每个方案的时序方案。它收集交叉口的交通需求,优化每个路口的时序方案,以此来减少十字路口的停车时间以及交叉路口的车辆延误。SCOOT采用的小步长调整策略更贴近当前的道路交通状况。然而,它的缺点是当流量变化很大时,系统需要大范围地调整控制参数,但是小步长策略响应速度太慢,无法适应当前的道路拥堵和疏散情况。当系统做出反应时,拥挤可能已经转移到另一个地方。因此,该系统不能满足快速疏散拥挤交通的要求。
图3 SCOOT拥堵策略图
2.3新型拥挤疏散系统的新功能
在当前的城市道路交通拥堵中,交通控制系统的路网应具有新功能,并从不同角度考虑拥塞控制方法。鉴于以上所述,新的交通拥堵疏散系统的新功能如下所示:
(1)及时收集数据:为避免数据和信息的延迟,系统需要及时收集当前道路的交通流量数据;
(2)快速计算最优解:系统应能快速响应根据当前的交通信息,快速计算出最佳的绿灯信号持续时间,并避免交通拥堵向其他地区蔓延;
(3)多个路口信号独立运行:每个路口的信号灯可以分别做出反应以避免影响整个交通网络。
(4)各路口信息共享:城市道路路口交通信号灯网络可以共同交换和共享信息。每个路口信号可以根据自己的信息和相邻的交叉点的车辆流量信息配合彼此来获得最佳解决方案。
只有具备上述特点的拥挤疏散系统才能有效地控制当前城市交通拥堵。本文将研究解决城市交通拥堵的方法来满足上述各要点。
3.多智能体技术
3.1多智能体技术模型
智能体的主要目标是自适应地感知环境变化并优化环境的运作。 它使用传感器来感知人们为其提供的环境,然后计算环境,然后使用执行器执行操作。智能体与环境之间的关系如下:
图4 智能体与环境之间的关系
根据上述智能体与环境的关系,多智能体交互如图5所示:
图5 多智能体基本结构
其中,传感器的作用是感知外部环境的变化;控制器是系统的控制中心和知识决策中心;效应器对外部环境做出反应,影响和改变;知识库的信息和数据智能体获得。外部感应;通信模块的作用是协助智能体交换内部信息。
多主体由多个单独的主体组成,它是具有多智能体的计算系统,能在环境中相互通信和合作。
4.基于多智能体技术的交通信号控制系统
交通拥挤疏散的最终目的是提高车辆的通行能力。绿灯持续时间的控制是整个系统控制的关键。当交通流量变化时,系统原来的绿灯持续时间无法再满足当前交通流。车辆的通行能力如以下公式所示[10]:
(1)
(2)
其中,ci是车辆的通行能力(pcu/h);si是饱和流速,即最大流速流量(pcu/h);lambda;i是绿色信号比;gi是绿灯持续时间;tc是信号周期(s)。
可以看出,要提高交通流量的通行能力,关键是要找到最实时适当的绿灯持续时间;即提高交通流的绿信比。因此,以下针对城市道路交通流,基于多智能技术且使用快速响应和快速计算能力的分层遗传算法来优化交通流绿信比,从而提高车辆的通行能力。
本文提出的基于多智能体的交通信号控制系统可以独立解决绿信比持续时间的调整策略。系统按照检测拥挤路段的交通流长度来调整绿信比增长率。拥堵时间越长,绿信比的比率越大。调整计划如下:
表2 绿信比调整计划
其中,队长比例是指两队拥挤的百分比;上升速度是指绿色信号比率的增长速度。
- 当拥堵开始时,绿信比开始以1%的速度向上调整,并逐渐增加绿灯信号等待时间;
- 当车队长度达到两个交叉口之间距离的50%时视为中度拥堵,系统自动将绿信比提高10%;
- 当车队长度达到两个交叉口距离的70%-80%时,视为严重拥堵,系统自动将绿信比提高25%-50%。
4.1系统组件
该系统采用分布式控制原理,无需中央控制器,并使用独立自主的方法。分布式控制系统由总控制中心,区域控制中心和单个路口控制中心组成。在这个系统中,交叉口控制中心是整个系统的关键。相邻路口共享信息且彼此合作。调整绿信比以实现时间优化本地自适应交通信号的优化方案。
4.1.1道路上的单智能体
它由红绿灯、传感器和摄像头组成,是系统的核心组成部分。单交叉路口的路况由路口本身的交通流情况以及其相邻路口的交通状况决定[11]。单交叉口智能体根据摄像机和车辆检测器传输的交通信息,与相邻交叉口代理共享和存储信息,然后根据相邻交叉口传递的交通信息优化当前交叉口的信号配时方案。该算法快速计算出当前交叉口的最优绿灯和红灯比,并改变交通灯的持续时间。
4.1.2区域智能体
每个路段所有交叉口代理的集中控制系统是控制中心,负责区域内交叉口的监控。为了协调和控制配时方案,必须根据区域路段代理共享的交通流信息与邻近地区合作。
4.1.3总控制中心代理
每个区域控制中心智能体的集中控制模块是整个系统最高的层次,它与区域智能体共享车流信息,实时监控区域路段交通流量的变化;具有最高的决策权,是整个控制系统的管理中心和各检测中心的区域智能体。
4.1.4协调方式
单个交叉口智能体使用黑板模型进行协调[12]。黑板模型有一块黑板,用于在相邻的智能体之间共享信息。每个智能体可以共享实时车辆传感器在黑板上传输的交通信息。基于这个流量信息,在计算出最新的最优解之前,将开发一个新的计时方案以最佳绿信比传送给交通信号。内部机制如图6所示:
图6 绿信比调制机制
4.1.5系统结构
整个系统控制的关键是每个智能体的控制范围。系统采用智能体控制交叉口的信号,减少智能体之间不必要的信息共享。每个智能体只需要与相邻交叉口的代理共享信息,并且相互配合,确保系统整体优化效果。基于多智能体的交通信号控制系统具有感知交叉口环境变化的能力与相邻交叉口代理通信的能力。内部信号控制系统的结构如图7所示。
图7 多智能体交通灯控制结构
该系统具有可靠性高、及时性好、针对性强、实时性强等特点灵活性强,适应性强的特点。它能更好地适应复杂流量网络的各种巨大突发变化,并通过分层继承。算法能更快计算实时最优交叉口的绿灯和红灯信号比。
5.分层遗传算法
5.1遗传算法(GA)
5.1.1实施过程
遗传算法是一种使用二进制遗传编码的搜索算法。它可以自适应搜索并优化全球问题。它的等位基因,个体空间。它的基因操作过程是对所有个体的交叉和变异,其基本实现过程如下[13]:
资料编号:[239787],资料为PDF文档或Word文档,PDF文档可免费转换为Word
- 生成初始种群:随机选择中等数量的个体作为初始种群,并设置进化代数计数器; <!--
剩余内容已隐藏,支付完成后下载完整资料

