英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
基于中等相干激光的高速Mach-Zehnder-OTDR分布式光纤振动传感器
摘要:本文提出了一种基于Mach-Zehnder-OTDR(光时域反射法)的高速分布式振动传感方法。采用超弱光纤布拉格光栅(UWFBG)作为反射标记,其后向光强比瑞利散射高2-4个数量级。由于我们的不平衡干涉仪与UWFBGs的间隔相匹配,中等相干激光可以替代传统的窄带宽源,从而获得优异的分布式振动传感性能。基于OTDR技术,可以实现3 m空间分辨率的相干检测和多个同步振动源的定位。具有增强的信噪比(SNR)能够在不平均的情况下快速检测分布的振动。振动范围从最高25KHz到最低10Hz通过本系统的检测都是可实现的,线性度为0.9896在最大偏差为3.46时
关键词:高速; 马赫曾德尔光时域反射法;超弱光纤布拉格光栅阵列;中等相干激光;光纤振动传感
1.简介
分布式光纤振动传感器因其在安全性、全分布式传感和大规模监测等方面的显著优势,在过去几十年中受到了广泛的关注[1-4]。它被用于各种应用场景,包括入侵安全[5],建筑健康监测[6],机械故障诊断[7],石油管道泄漏监测[8],其中的信号可以建模为一个空间分辨的临时干扰。
萨格纳克和马赫曾德尔干涉仪(MZIs)具有灵敏度高、响应快的优点,但无法区分多个同时存在的振源[9,10]。相敏光时域反射计(Phi;-OTDR)使分布式振动传感分析瑞利反向散射光的干扰来自附近的脉冲光源沿光纤传播时的相干长度。而散射光非常微弱,典型的散射比为- 80db,所需的高相干源[11]也会产生严重的相位噪声。因此其原始信噪比(SNR)很差,需要通过时间光谱均衡来提高信噪比[12,13],这使得该技术仅适用于低速振动测量。为了提高可应用的频率响应, 将马赫曾德尔干涉和Phi;-OTDR合并[14、15]。合并后的系统实现了5m的空间分辨率和10MHz以内的最高频率响应,但合并系统无法恢复多点信号。最近, 超弱光纤布拉格光栅阵列也用于提升Phi;-OTDR高信噪比。获得的反射强度比瑞利散射高4个数量级。但这些方法仍然需要一个高相干光源:一个线宽为5 kHz的分布式反馈窄线宽光纤激光器(DFB-FL)是用来确保从相邻的光纤光栅反射的光的相干性[16],在类似的系统中[17],可调谐激光器选用线宽是3.7KHz的光作为光源。
本文提出了一种基于超弱光纤布拉格光栅(UWFBG)的高速Mach-Zehnder-OTDR分布式光纤振动传感器。振动传感器是单模光纤,在光纤上写入反射率在0.01%左右的UWFBGs,产生不同位置的反射光。较之间改进后的基于UWFBG阵列的Phi;-OTDR, 我们调整光脉冲宽度到适当的值,使中等相干光脉冲干扰通过我们的平衡干涉结构。本方案的显著优点是低成本的线宽约为10mhz的DFB激光器。此外,还效果显著的实现了基于中等相干光的分布式光纤振动传感。实验结果表明,振动定位的空间分辨率为3 m,信噪比可达6.7 dB。特别是,被检测的频率响应多达25 kHz,和最大偏差约为3.46 nε。
2.原理
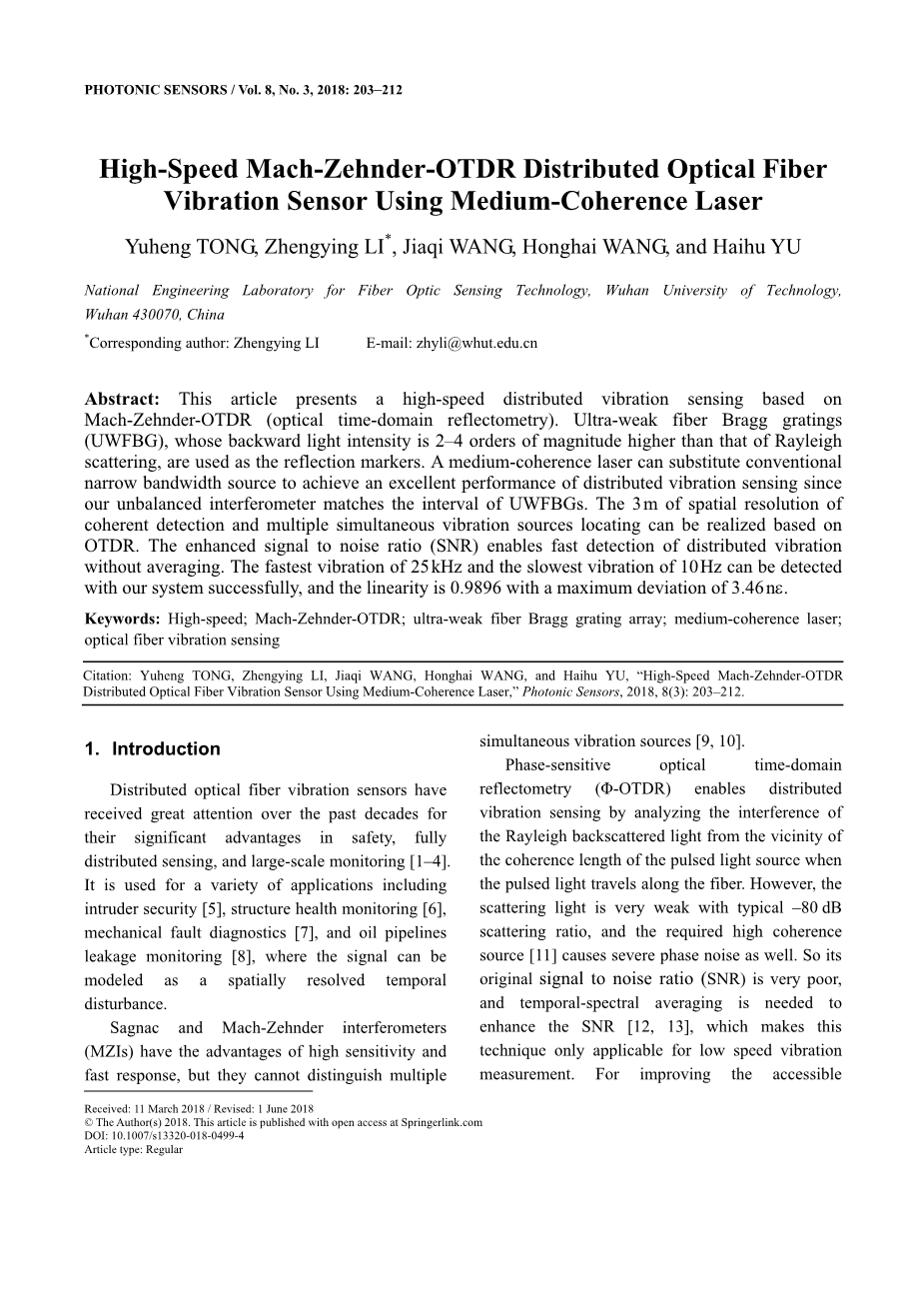
UWFBG Mach-Zehnder-OTDR分布式振动传感系统如图1所示。光源为DFB激光器(LUCENT D2526T31),最大输出功率为1mw,线宽为10mhz。利用半导体光放大器(SOA, INPHENIX IPSAD1522C)将激光器发出的连续波(CW)光调制成纳秒脉冲,其消光比(ER)高于70db。脉冲光通过掺铒光纤放大器(EDFA)放大,然后通过环形器通过均匀分布的UWFBGs发射到被测光纤中。UWFBGs的反射脉冲通过3times;3耦合器相位解调单元,该单元由不平衡马赫-森德尔terferometer、3times;3耦合器和3个检测器组成。采用相位调制单元,避免信号的衰减,恢复振动的幅度。使用高速示波器采集三个探测器的串行数据。
图1中等相干激光高速Mach-Zehnder-OTDR分布式光纤振动传感器示意图。SOA:半导体光放大器,EDFA:掺铒光纤放大器,CIR:环行器,PD:光电探测器,OSC:示波器。
2.1振源定位理论
振动源定位的基本理论是基于OTDR技术。与任何OTDR系统一样,短光脉冲被输入UWFBG阵列。相邻的光栅之间有固定的距离L1,和相邻脉冲之间的延迟T1可以写成
(1)
其中n是光纤的折射率, c是在真空中光速, Delta;L时相邻光栅反射脉冲的路径差(OPD)。光脉冲的宽度不应小于延迟Delta;T1以避免多个反射脉冲的混叠。相位解调单元中MZI的不平衡路径将每个反射脉冲分离为两个脉冲。令MZI的OPD等于2 L1,则MZI的两条边的传输延迟T2可以计算为
(2)
其中L2和L3分别为两个干涉臂的长度。
如图2所示,较近的光栅中较慢的亚脉冲A2与较远的光栅中较快的亚脉冲B1相遇,然后相互干扰。通过干扰信号可以解调相邻光栅间的相位扰动。从而建立干扰信号与感测位置的对应关系,同时定位多个感测点的位置,如图3所示。
图2振源定位原理。Delta;T1从光纤光栅# 1到光纤光栅# 2的反射的延迟,Delta;T2是通过不平衡MZI传输的光脉冲的延迟。是光脉冲的宽度。
图3干涉光脉冲序列与传感位置的关系。序列的第一和最后的光脉冲对记录振动是无用的。#1到#5分别是传感光纤段的序列号。
2.2振动传感与解调理论
对比瑞利反向散射光的每个光纤部分传统Phi;-OTDR系统,这是通过增加随机分布散射在该节长度、反射光栅的反射器可以被看作是一个固定的点。从理论上讲,每一对干涉光脉冲的ch光程差可以看为零。因此,我们提出的系统不需要高相干激光。
干涉光脉冲信号的强度表示为
(3)
I1 和 I2 两个光脉冲到达观察点时的光强度, Delta;是动态相移, phi;0是初始相位。当phi;0接近的倍数[18]时Delta;的灵敏度逐渐变成0。这里选择3times;3耦合器去解决这个问题,在理想分割率下,3臂3times;3耦合器的输出强度可以用以下表达式表示:
(4)
这就是在每个3times;3耦合器输出口的2的相位差, 在任何情况下,各端口输出的变化率都不可能同时为0。所以我们可以检测到三个输出信号去解调Delta;通过使用这个算法[19]。
当外部干扰作用于光纤时,基于解调的动态相移的两个UWFBGs之间的OPD可以恢复振动信号。
2.3频率响应分析
在分布式振动传感(DVS)系统中,限制振动测量频率响应的重要因素是最高采样频率。
外部振动和其他环境因素都可以导致相位偏移Delta;。但与外界振动相比,温度等环境因素的频率较低。因此, Delta;可以表示为:
(5)
D和omega;s分别是振幅和由外部振动造成角频率的相移, phi;(t)是被其他环境因素造成的更低的频率相位偏移。
指数i设置为1。然后将(5)带入(4),(4)的交替组件(AC)可被如下公式表示:
(6)
根据贝塞尔函数,我们可以从(6)中得到(7)。为了恢复振动信号,需要获得足够的谐波信息,其中贝塞尔值大于0.1。所以对于不同的D,IAC和omega;s之间的关系清晰地由图4 (a)展示。
(7)
D的值由传感器的灵敏度特性决定。在此,我们不讨论灵敏度的强弱,因此D可以被认为是1。由图4(a)可知,光强变化所占用的带宽是振动角频率的两倍。根据奈奎斯特采样定理,为了避免频谱混叠,采样频率必须大于干涉光信号占用带宽的两倍。因此,如果外部振动的频率为fs,最低采样频率要求为4fs。
在DVS系统, 脉冲光的重复率ftau;决定了采样频率fs,当ftau;足够快,同一时间会有多个脉冲光通过UWFBG光纤传感器,这样就会产生多脉冲串扰。从图3可以看出,在系统中,经过MZI后,N个UWFBGs会产生N 2个脉冲。考虑到避免了频谱混叠和串扰,fDVS应满足以下公式:
(8)
随着传感光纤距离的增加,fDVS会迅速减小,如图4(b)所示。当空间分辨率为3 m时,感知距离约为1 km时,感知带宽达到25 kHz。
(b)
(a)
图4频率响应分析:(a)在光信号的带宽的关系,光信号的相位偏移振幅,外部振动的频率和(b)频率响应之间的关系,感应距离和空间分辨率。
2.4信噪比分析
系统中主要存在3种噪声:散粒噪声s2 = 2q·(IRBS In Id)·Delta;B(这里q是电子的电荷,IRBS是瑞利后向散射的检测电流, Id是探测器的暗电流,B是信号的带宽),热噪声T2,和瑞利反散射噪声。假设各散射中心的散射系数相同,且各光纤截面上的M个散射中心长度为L1。检测到的电流信号与光强成正比,所以瑞利反散射电流噪声可以被视为:
(9)
其中,IRBS (t)为距离LN = NL1处瑞利后向散射的探测电流,I0(t)为入射光强,是光纤 的衰减系数,rkN为第n段散射中心的瑞利反射系数。
因此被检测信号的信噪比描述为
(10)
其中Pr和PRBS分别为反射光和背散射光的探测功率。与 s2和T2关联的探测器有一个超低的光度。因此UWFBG的反射率比瑞利散射大四个数量级,Pr 比PRBS大许多。因此,高信噪比的系统是可以实现的。
3.实验结果与讨论
在实验装置中,332个UWFBGs分布在1公里长的光纤中,间隔为3米。UWFBGs的均匀波长为1550.947 nm、带宽为0.2nm、反射率为0.01%(-40dB)。光纤纤维部分在UWFBG # 100, UWFBG # 101, UWFBG # 300和UWFBG#301之间的缠绕在两个相同的圆柱形压电换能器# 301(压电)产生应变变化。实验装置包括我们提出的DVS系统和一个标准马赫-曾德尔干涉仪的校准组件,如图5所示。当DVS系统测量时,光开关1将DFB激光(Lucent 2526,10MHz线宽)连接到SOA,光开关2将UWFBG阵列连接到环行器。光脉冲有100kHz的重复率,脉冲宽度为20ns(遵从lt; 2nL1 / c)。相位解调单元采用6m的不平衡路径来匹配光栅的间隔。用示波仪(Keysight DSA 134A)以200msps的速度采集50ms的数据。实验装置如图6所示。
图5实验结构,所有UWFBGs具有相同的反射率和中心波长。当光开关2将UWFBG阵列连接到耦合器2上时,用马赫-曾德尔干涉仪对振动进行标定。
图6分布式光纤振动传感系统实验台:(1):直流电源,(2):DFB, (3): SOA, (4): PD, (5): EDFA,(6):脉冲发生器,(7):不平衡马赫-曾德尔干涉仪,(8):OSC, (9): CIR, (10): PZT驱动,(11):UWFBG阵列。
比较信噪比和相干光源的要求,一方面,我们窄线宽激光(NL)和
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[239745],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

