英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
Vehicle Detection Based on Underneath Vehicle Shadow Using Edge Features
基于车底阴影的边缘功能的车辆检测
摘要 此文章提出了一个计算机视觉的车辆检测算法。这一算法的重点是根据动态交通场景对车辆进行检测。这种场景能通过使用固定在作为位置上的车载摄像头来记录前方的交通情景。这种检测算法是基于车辆下方的阴影提出来的。相比于环境和道路来说,车辆下面的阴影有着更高的密度,这一特点可以作为检测的最主要特点。 为了实现低水平的计算复杂度,使用水平Sobel检测边缘特征,通过使用Scharr运算符增强边缘特征。联合Blob分析来检测想要得到的特性和利用目标检测来标记在最终检测中被检测出来的车辆。这一算法的结果显示,在车辆的检测中,这一方法是有效的并且得到了一个高精度的结果。
关键字 Blob检测,边缘检测,感兴趣区域,车辆检测
1.引言
交通事故每天都在伤害和带走人们的生命,绝大多数事故来源于驾驶员自己的错误。粗心驾驶和超速行驶是造成交通事故最主要的原因之一。事故保护研究和发展一直很受人们关注,其目的是降低事故严重程度由此减少伤害和伤亡。道路上最主要的威胁通常来自于其他车辆,因此一个杰出的系统是必须的,这样驾驶员就能够良好地判断驾驶环境。在自动驾驶中,车辆检测是使用信息来进行交通情况检测地第一步。
有许多种类的车载传感器,包括雷达[1],激光雷达[2、3]和计算机视觉传感器[4_7],计算机视觉是当下一种获得了巨大进展的方法。这种使用一帧一帧的视频顺序地分析的方法是一种巨大的进步,因为完整的交通流通环境都被包含在内并且被分析。许多参数能从视频中获得比如车辆的数量,交叉路口的车流量,车辆速度的测量和更多能够被用来分析的数据。
现在,相机变得更加便宜而且能够产生更高质量的视频帧数,这是一个使用图像处理技术进行分析的时间点了。被上传到计算机和图像处理的视频序列用以执行车辆检测和追踪。通常将静态相机固定在一个位置用来检测交通状况[9-11]。对前侧车辆的检测越来越引起人们的研究兴趣。有更多的研究使用车载摄像头来记录道路场景并为车辆检测设计算法,比如[12-14]。
在基于知识的方法下用于车辆检测的算法开发使用诸如对称性,颜色,阴影,边缘特征,纹理和车辆灯光之类的信息。一副图像中包含了用于假设车辆位置的高级信息。对称性很重要,因为大多数车辆其前后视图具有水平对称的特征[15]。
颜色信息和尾灯功能在[16]中用于夜间车辆检测。法律要求每辆车的尾灯必须为红色,因此可以使用红色平面信息提取特征并将其用作检测点。但是,这种方法存在局限性,因为只能在夜间和深夜进行车辆检测。
由于车辆纹理与周围道路纹理不同,借此实现了基于纹理的车辆检测。[17]展示了可以通过熵或共现矩阵对图像结构进行统计分析以分割车辆图像。由于与车辆纹理的相似性,这一方法会对周围的物体(例如建筑物和指示牌)产生错误的检测,这是这一方法的一些重要的缺点。
边缘特征适用于车辆检测,因为无论是在水平和垂直方向上还是车辆的后部和前部都包含许多边缘特征。文献[8,18]的研究在其算法中使用了Sobel边缘检测,该算法是经典的一阶边缘算子。边缘的鲁棒性使假设生成步骤更容易,并且对于参数选择的敏感性降低。
通过分析过去的有关分析研究,本文开发了一种算法,该算法使用基于边缘的方法通过Scharr-Sobel边缘检测从车辆中提取信息。在该算法中,还使用了ROI处理,高斯模糊,连接的组件标记和具有边界框提取的斑点分析来标记用于车辆检测的车辆。有关完整算法的描述将在下一节给出。
2.算法开发
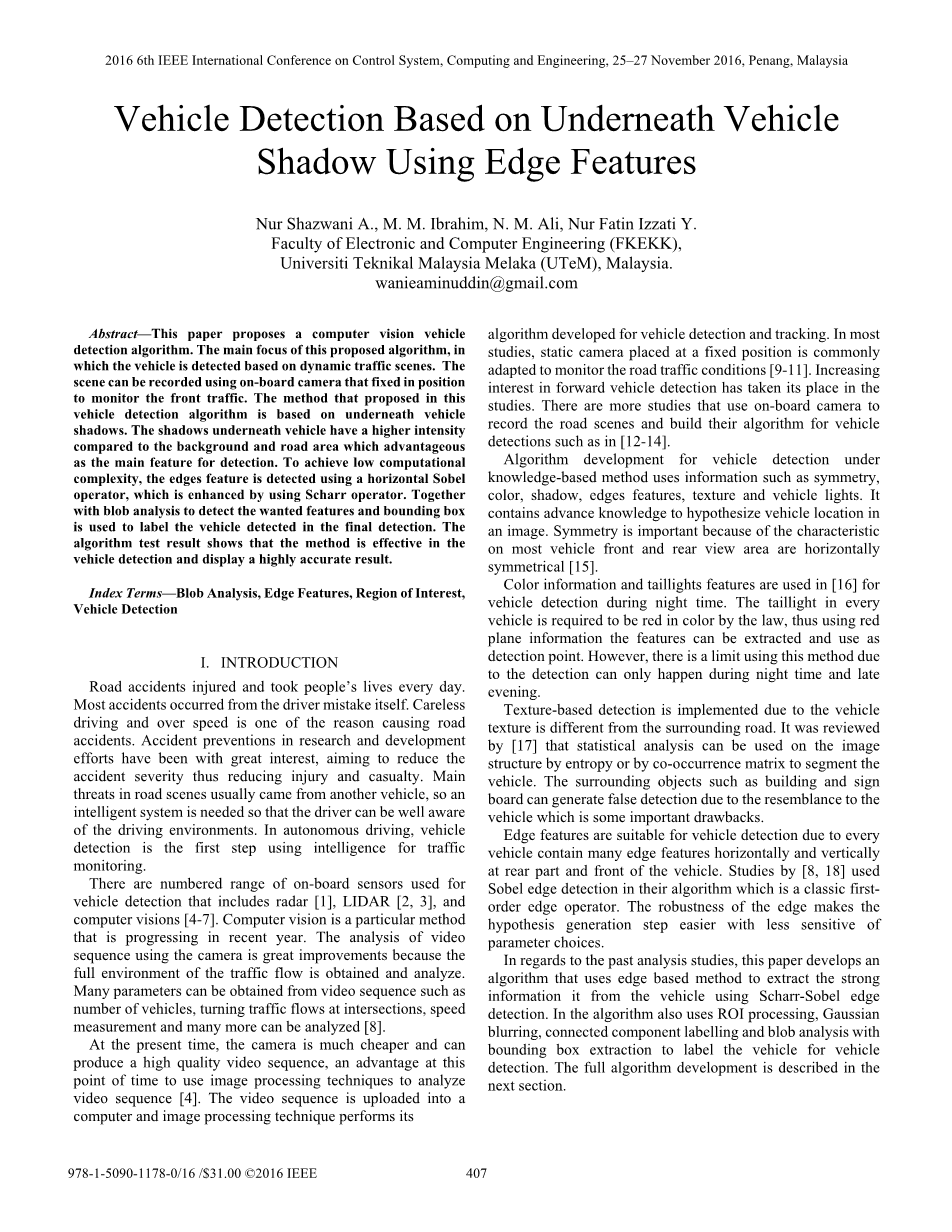
从图1的流程图可以看到背景消除系统的整体流程。
算法开发流程从记录马六甲,吉隆坡和新山周围的道路场景开始。使用安装在车辆中的车载摄像头记录视频序列。因此,该检测是基于前方的车辆检测。使用感兴趣区域(ROI)定义将进行检测的处理区域。水平Scharr-Sobel算子是边缘检测算子,边缘特征和阴影线特征可以图像增强来突出显示。由于边缘检测会
图1.算法总体框架图
产生大量噪声,因此连接的组件标记算法可以减少并消除噪声的存在。通过确定其像素区域可以消除处理区域的一些其他特征的影响,例如道路标志,道路车道和其他干扰。最后,特征检测使用斑点分析并将斑点作为车辆进行检测。 关于该算法的相关细节会在接下来的过程中进行解释。
2.1感兴趣区域(ROI)
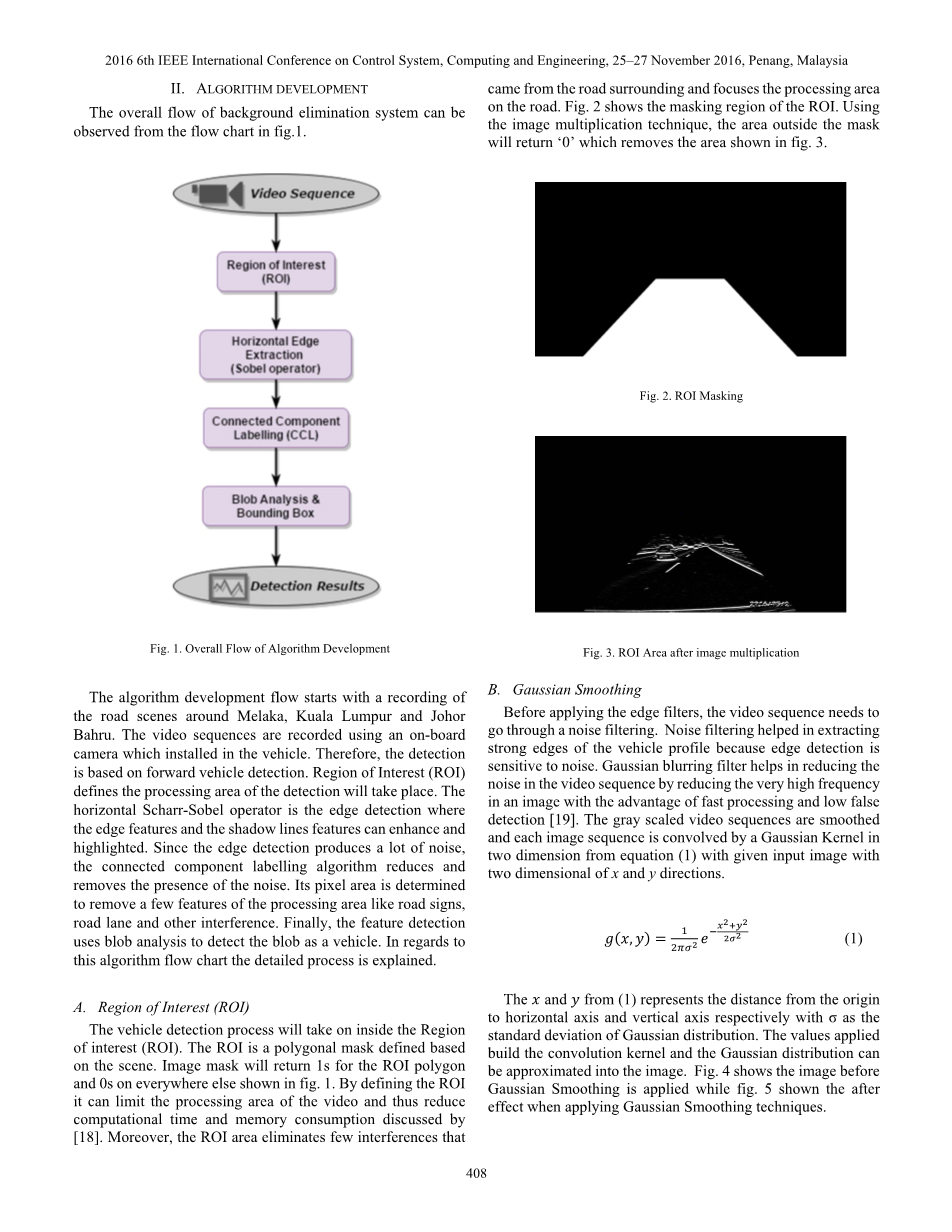
车辆检测过程将在感兴趣区域(ROI)内部进行。ROI是基于场景定义的多边形掩模。 图像掩模将为ROI多边形返回1,在其他任何地方返回0(如图2所示)。通过定义ROI区域,它可以限制视频的处理区域,从而减少[18]讨论的计算时间和内存消耗。此外,ROI区域消除了来自道路周围的干扰,并将处理区域集中在道路上。 图2示出了ROI的掩蔽区域。使用图像乘法技术,遮罩外部的区域将返回“ 0”,从而删除了图3中所示的区域。
图2.ROI掩模
图3.掩模后的图像
2.2高斯滤波
在应用边缘滤波器之前,视频序列需要经过噪声滤波。 噪声过滤有助于提取更好的车辆轮廓边缘,因为边缘检测对噪声非常敏感。高斯模糊滤波器通过降低图像中的高频成分来帮助减少视频序列中的噪声,并具有快速处理和低误检的优势[19]。灰度视频序列经过平滑处理,每个图像序列都是由给定的输入图像的x和y方向的数值按照等式(1)计算后的的二维卷积。
等式(1)中的X和Y分别表示从原点到水平轴和垂直轴的距离,其中sigma;为高斯分布的标准偏差。卷积和构建所应用的值和高斯分布可以近似到图像中。图像4显示了在应用高斯平滑之前的图像。图5显示了应用高斯平滑技术时的图片效果。
图4.高斯滤波前
图5.高斯滤波后
该过程涉及将噪声添加到图像中,其中该噪声表示涉及内核的卷积。因此,高斯分布值用于建立具有最高高斯值的图像的原始像素值的卷积矩阵,并且当距原始像素的距离增加时,相邻像素将获得较小的权重[20]。从结果图像来看,该技术减少了可能干扰检测过程的噪声数量。此外,车辆下方阴影的强度增加,显示了更好的检测功能。
2.3边缘特征提取
车辆的底部通常比周围的物体和道路更暗。 从这些信息中,我们可以基于阴影位置设计车辆检测方案[21]。通过计算其梯度强度来提取信息。 为了检测车辆阴影线的下方,使用了渐变掩模。为了找到梯度方向,使用Sobel运算符提取视频序列上的边缘检测。 运算符的计算公式为(2)。
两个3x3 核心Gx和Gy代表垂直和水平导数的图像方向。原始的Sobel运算符使用a=1,b=2作为矩阵的两个参数值,操作结果如图6所示。
图6.Sobel 边缘检测
为了增强边缘检测中的阴影信息,文章[8]中将参数a设置为3,b设置为10.这样的参数设计进一步增强了边缘特征,而且从图7中可以看出图片所包含的信息更加清晰。
图7.Scharr-Sobel边缘检测
为了进行水平边缘特征检测,使用公式(2)中的Gy内核来提取水平边缘像素。由于后面的阴影和车辆特征在水平特征上更具特色,因此该方法适合在本研究中实施。在边缘检测之后通过图像阈值化将图像转换为二进制图像。 图片像素值始终为lsquo;0rsquo;或者lsquo;1rsquo;。
2.4标签区域
相邻组件标签用于消除干扰检测的噪声,例如道路标志,树木,道路标记和其他可能干扰车辆检测准确性的干扰元素。需要图像连接邻居的图像信息的连接组成部分。图像的像素区域和其他每个方向的参数中的分量都被调用。使用具有方向的二值图像中存在的所有分量的条件由干扰车辆阴影的道路标记的角度确定。而对于像素区域,则要去除小噪声,并使用带有条件的大物体。其结果见图8所示。
图8.相邻组件标签
这样一来道路标记被删除,图像就会聚焦在车辆的特征上。 在该过程之后也没有细小的噪声,这为下一个过程车辆检测精度的做出了重大贡献。
2.5斑点分析
相邻组件的标签分段消除了干扰,例如道路标记和周围物体(例如树木和道路标志)。因此,用于特征检测的斑点分析能够以较高的准确性和较低的计算时间来检测车辆下方的阴影。但是,为了提高鲁棒性,需要对检测到的斑点进行分析以避免错误检测。 在图9所示的CCL过程中,有些噪音和物体没有完全被消除。
图9.错误的检测结果
为了解决这个问题,使用其边界框区域对参数200到500的参数进行过滤,以检测出的阴影特征斑点,该参数定义了ROI内部距离之间的下方车辆阴影的特征。通过该分析,检测结果得到改善,不需要的干扰和错误的检测消失了,如图10所示。
图10.正确的检测结果
最后,下一部分将讨论该算法的结果输出,该算法能够使用提取的阴影特征来检测道路上的车辆,并测试所有视频。
结果和讨论
为了评估该算法的性能,使用车载摄像头对录制的不同视频序列进行了测试,以分析每帧中的检测精度和鲁棒性。
图11至14展示了此算法在不同的视频中测试的结果。边界框的高度基于宽度与高度的比值增加0.9。 使用该值,边界框的高度适合检测到的车辆以显示最终结果。
图11.多车检测
图12.弯道车辆检测
图13.大型车辆检测
图14.雨天车辆检测
该算法已在多个道路视频上进行了测试。所有视频中的总车辆为225,其中包含多种类型的车辆,例如汽车,货车,公共汽车和摩托车。该算法的性能见表1,从表中可知检测准确率达82.22%。
表1 检测率
|
车辆总数 |
被检测出的车辆数目 |
精确度 |
|
225 |
185 |
82.22% |
当车辆离ROI太近且不在ROI内时,就会发生误检测和不检测的问题。 其他原因是因为车辆的阴影特征太弱限制了进行检测的阴影特征。在检测到非车辆物体(例如道路标志和道路标记)的地方,也会发生误检测的情况。
4.结论
本文提出了一种基于前向检测的车辆检测算法。该算法使用基于知识的车辆阴影信息方法来假设视频序列中的车辆位置。在马六甲,吉隆坡和柔佛州不同驾驶条件下,对该算法的性能进行了相关的测试和评估。所有视频数据都是使用安装在主车辆内的车载摄像头拍摄的。本文为包括ROI开发在内的算法开发做出了贡献,通过限制处理区域,减少了计算时间。水平Scharr-Sobel运算符用于增强前进车辆的车辆阴影下方的边缘特征。由于车道标记和诸如道路标志之类的道路对象可能会干扰,因此通过消除小和大噪声来定义像素的面积和方向来使用相邻的组件标记算法。特征检测利用斑点分析来检测车辆下方的阴影特征,以便通过边界框进行最终检测以确认检测结果。
致谢
感谢马来西亚马六甲工业大学(UTeM)的帮助以及高等教育部根据RAGS / 1/2015 / TK0 / FKEKK / 02 / B00101对这项研究的支持。
参考文献
[1] Hammarstrand, L., et al., Extended object tracking using a radar resolution model. Aerospace and Electronic Systems, IEEE
Transactions on, 2012. 48(3): p. 2371-2386.
[2] Cheng, J., et al. Robust vehicle detection using 3D Lidar under complex urban environment. in Robotics and Automation (ICRA), 2014 IEEE International Conference on. 2014. IEEE.
[3] Thornton, D.A., K. Redmill, and B. Coifman, Automated parking surveys from a LIDAR equipped vehicle. Transportation Research Part C: Emerging Technologies, 2014. 39: p. 23-35.
[4] Sivaraman, S. and M.M. Trivedi, Looking at vehicles on the road: A survey of vision-based vehicle detection, tracking, and behavior
analysis. Intelligent Transportation Systems, IEEE Transactions on, 2013. 14
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[239199],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

