
英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
基于相平面分割的分区比例控制器
摘要:
比例控制方式很容易实现,但是系统的动态性能、稳态性能和稳定性不符合比例控制要求。基于相平面划分的比例控制器的不同分区比例控制策略会影响系统性能指标。调整基于不同相平面划分的控制器的比例控制可以改善某些性能指标从而整体的性能指标可以得到提升。讨论了控制参数对系统的稳定性、稳态指标及动态指标的影响。最后,讨论了相平面划分比例控制器参数的获取方法。
关键词:相平面划分;智能控制;比例控制;稳态性能;动态性能
Ⅰ.导言
PID控制器在许多工业中得到了广泛的应用,但是很难通过参数的自整定得到理想的控制效果。理想的控制参数依赖于被控对象的数学模型,同时,工业过程的数学模型越来越难以获得。搭建模糊控制或者基于规则(经验)来控制的智能控制方式的被控对象的数学模型是不必要的。然而,在模糊控制中对信息进行简单处理会导致控制精度下降,危害动态质量。虽然精度可以通过增加量化级数来提升,但是系统的决策速度会降低。根据误差和误差斜率,采用基于相平面划分的比例控制器,将系统的运行状态分为九个工况。很容易根据不同的比例控制策略来实现不同的工作状态。在不同的工作状态下,比例增益与系统稳定性、稳态误差、最大超调量、上升时间等时域性能指标有一定的关系,因此可以根据系统时域性能的要求设置参数[1-3]。调节控制器在不同工况下的比例增益,可以使系统局部性能指标达到最优,从而使系统全局性能指标达到最优。使用了相平面分析方法来分析如何通过比例控制器的参数来改变系统相轨迹。这样就得到了比例控制器基于相平面分割的参数调节方法。
Ⅱ.控制策略
基于相平面分割的比例控制器的结构图如图1所示。在基于相平面分割的比例控制器中调整比例增益,以便根据误差和误差斜率来调整控制器输出。定义r(t)表示参考输入c(t)表示表示输出,e=r-t表示系统误差,导数为,其中T为采样周期,i为当前采样时间,i-1为最后采样时间,给定plusmn;e表示误差容限,plusmn;表示误差斜率容限,因此误差e和误差斜率可以分别有三种不同情形,即egt;,|e|le;,e<-和>,|le;,<-。
结果,这些不等式导致相平面上的九个模块,这九个组合状态由相平面描述,如图2所示。
在由e和组成的相平面上,有四条虚线:。期望的零斜率带在和之间,期望的零误差带在和之间。整个相平面被四条虚线分割成九块,其对应运行系统的九个工况。
不同的模块要用不同的比例增益控制策略。在特定模块控制器的输出是,其中()表示控制参数,控制策略分析如下:
a)若egt;,>,那么
b)若egt;,le;, 那么
c)若egt;,le;,那么
d)若ele;,>, 那么
e)若e<,<, 那么
f)若e<,le;, 那么
g)若e<,>, 那么
h)若|e|le;,le;, 那么
i)若|e|le;,le;, 那么
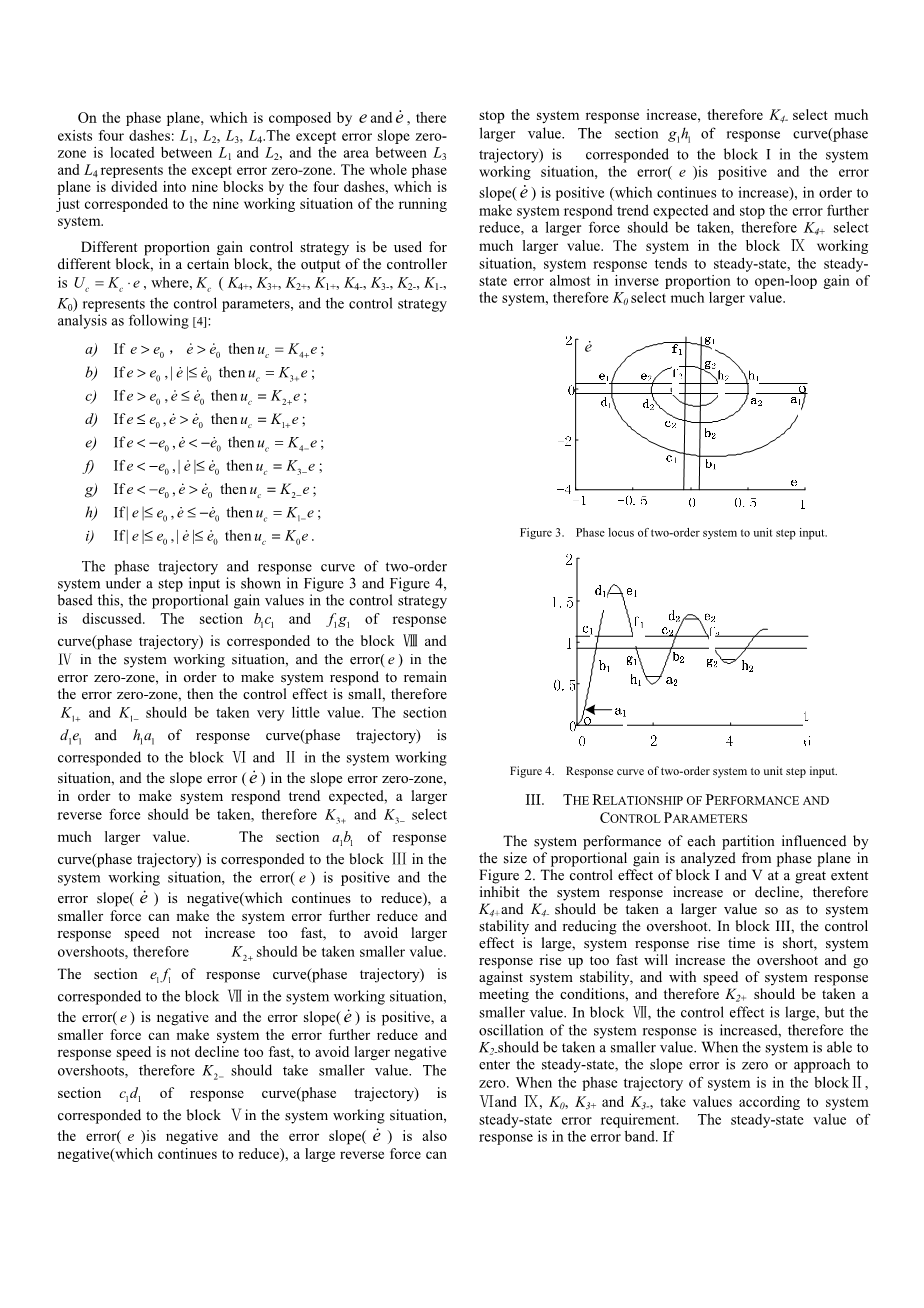
二阶系统在步进输入下的相轨迹和响应曲线如图3和图4所示,基于此,讨论了控制策略中比例增益的取值。响应曲线(相轨迹)的段和段对应系统工作状态的模块Ⅷ和Ⅳ和零误差带的误差。为了使系统响应保持在零误差带,从而控制的影响会很小,因此和应该取很小的值。相应曲线(相轨迹)的段和段对应系统工作状态的模块Ⅵ和Ⅱ和零误差斜率带的误差斜率。为了让系统响应趋近于期望值,应采取较大的反作用力,因此和的取值十分大。响应曲线(相轨迹)的段对应系统工作状态的模块Ⅲ,误差(e)为正误,差斜率()为负(继续减小)。一个细微的作用力就能使系统的误差进一步减小,响应速度不会增加太快,为避免较大的突变,因此应取较小值。响应曲线(相轨迹)的段对应系统工作状态的模块Ⅶ,误差(e)为负,误差斜率()为正,一个细微的作用力就能使系统的误差进一步减小,响应速度不会衰减太快,为避免较大的负性突变,因此应取较小值。响应曲线(相轨迹)的段对应系统工作状态的模块Ⅴ,误差(e)为负,误差斜率()也为负(继续减小)。一个大的作用力能组织系统响应的增长,因此-应取一个非常大的值。响应曲线(相轨迹)的段对应系统工作状态的模块Ⅰ,误差(e)为正,误差斜率()也为正(继续增大)。为了让系统响应趋近于期望值并且阻止误差进一步降低,必须加入一个大的作用力,因此应取一个非常大的值。系统在模块Ⅸ的工作状态下,系统响应趋近于稳定,状态误差与开环增益几乎为正比,因此选取一个十分大的值。
Ⅲ.表现和控制参数的关系
图2的相平面分析了比例增益大小对每个分区的系统性能的影响。模块Ⅰ和Ⅴ的控制效果在很大程度上抑制了系统响应的增加或下降,因此要保持系统的稳定性和减少超调,和必须取很大的值。在模块Ⅲ中,控制的影响很大,系统响应的上升时间很短,系统响应上升的太快会增加超调并且影响系统的稳定性,并且随着系统响应速度满足条件,所以必须取一个小值。当系统进入稳态,斜率误差为零或趋近于零。当系统相轨迹在模块Ⅱ,Ⅵ,Ⅸ时,和根据系统的稳态误差要求取值。响应的稳态值在误差范围内。如果
1/(1 )lt;
1/(1 )lt;
1/(1 )lt;
那么,稳态误差为=1/(1 )
A、系统稳定性分析
假设开环系统传递函数为G(S)=1/(,采用单位负反馈比例控制策略,比例增益Kgt;1,单位阶跃响应持续震荡。而基于相平面划分的比例控制器的和值增加,系统的单位阶跃响应在误差范围内。响应曲线如图5所示,此时,比例增益K=21,=0.1,==84,=21.
该系统的开环传递函数为G(s)=5/[s(s-1)],采用比例控制作为控制策略,无论增益K有多小,系统的单位阶跃响应都是单调的发散的。当基于相平面分割的比例控制器选择==100,其他分区增益=0.1,=0.1或0.05,系统的单位阶跃响应曲如图6所示,此时系统响应在误差范围内。
当基于相平面分割的比例控制器控制二阶系统时,二阶系统是临界稳定和不稳定的。如果模块Ⅰ和Ⅴ的比例增益和十分大,系统的单位阶跃响应在误差带内。图7显示了图5中系统的相轨迹图像。由图可知较大的和-让系统相轨迹向坐标原点收缩,最终形成一个有限的圆环。系统响应在误差带内。当系统响应超过误差带时,增大比例增益可使系统响应的震荡频率增大,从而抑制系统响应的增长,这使得系统在经过几个震荡周期后很快回到误差带,系统的响应保持在误差带内。因此只需为基于相平面分割的比例控制器选择适当的和就能使系统响应在误差带内,就能确保系统的稳定性。
B、稳态分析
对于临界稳定和不稳定的二阶系统,如果比例控制器的和值选择恰当,系统响应会在误差带内。而且可以得到系统的稳态表现。对于二阶稳定系统,相轨迹有稳定的节点或焦点。他们分布在相轨迹的模块Ⅸ、Ⅱ、Ⅵ中。因此,基于相平面划分的比例控制器的值可以通过适当选择参数,,和来设置。系统响应在误差带内且可以得到系统的稳态表现。假设原系统的开环增益是1,若1/(1 ), 1/(1 和1/(1 比小,当相轨迹进入误差带并且趋进偏离带的中心的相轨迹焦点为1/(1 )时控制动作为e。若1/(1 ), 1/(1 和1/(1 大于,相轨迹的焦点在偏离带的外部,当相轨迹进入偏离带,相轨迹向偏离带外部延伸的焦点为1/(1 )并且趋近偏离带的最终相轨迹的焦点为1/(1 或1/(1 时控制动作为e。如果被确定的焦点在偏离带外,被和确定的焦点在误差带内,偏离带边缘的相轨迹形成有限的环。
假设开环传递函数G(S)=1/(0.5S 1)(S 1),其中=0.1,=10。若=10,=20,响应曲线的稳态值进入误差带,响应稳态值为=/(1 k)=0.955;若=6,=5,响应曲线的稳态值在误差带外且响应的稳态值为=/(1 k3 )=0.857.若=20,=5响应曲线的稳态值趋于误差带的边缘,响应稳态值为=(1-)=0.9.二阶系统响应曲线如图8.
C.动态性能分析
假设开环传递函数为G(S)=1/(2S 1)(5S 1),=0.1,=10。若===50,则系统单位阶跃响应的稳态值为=/(1 )=0.98,系统上升时间为=1.9s,最大超调量为sigma;=21.1%。若==15,系统上升时间=1.48s,最大超调量为sigma;=35%。通过增大和 ,系统响应速度提升了超调量也增加了。为了抑制超调量上升,可以增加和 。控制器的其他参数值保持不变。将和 的值从10调到50,系统响应的上升时间保持不变,最大超调量提升至sigma;=23.1%。当控制器参数取不同的值是,系统单位阶跃响应曲线由图9所示。控制器参数和 的值影响系统响应速度。当和 的值增大,系统响应速度加快,超调量增大。同时增大和 的值可以抑制系统超调的增加。
D.控制器参数确定
根据已知的分析,改变控制器参数可以改变相轨迹从而提升系统性能。基于相平面划分的比例控制器的不同分区的比例增益对控制系统的性能指标有影响。根据控制系统的性能要求调整参数可以使相应系统的性能指标最优,从而整个系统的响应最优。系统的稳态性能取决于 ,和 ,为了满足控制精度要求,1/(1 )lt;,1/(1 )lt;和1/(1 )lt;必须根据系统响应的稳态误差来选取,同时要取一个较小值。系统稳定性和超调量取决于和 ,为保证系统稳定性及尽可能少的超调,和 要取较大值。影响系统的响应速度和稳定性。为了达到要求的响应速度,要取一个较小值。由误差带的模块Ⅳ和Ⅷ,和需要取一个较小值来保持系统稳定性。
Ⅴ.总结
从以上对相平面的分析中,我们知道增大 ,和 的值能够减小系统的稳态误差。但增大和 会增加系统响应的振荡线。因此要取尽可能大的值,并且只要和 的值满足1/(1 )和1/(1 )的值小于.较大的和 值可以保证系统稳定性和较小的超调量。所以和 的值要尽可能取大。的值影响系统响应速度和稳定性。当满足系统响应速度时,取较小值。的值不利于系统稳定,一般取较小值。较大的和值会增加系统响应振荡,因此取较小值。根据控制参数对系统性能的影响,对参数进行调整,使响应的性能指标达到最优。最终系统整体性能达到最优。
参考文献
[1] Zhang Nanlun, “New Control Principle[M] [in Chinese],” Beijing:
National Defense Press, 2005
[2] Tan Siyun, Xu Wuxiong, “Phase-Plane Analysis of the Nine-Point
Controller[in Chinese],” journal of Wuhan University
Technology(Information amp; Management Engineering),2002, vol. 24, no.
5, pp. 114-116.
[3] Tan Siyun, Xu Wuxiong, “Steady-state Performance Analysis of Nine
point Controller[in Chinese],” journal of Wuhan University Technology,
2002, vol. 24, no. 10, pp. 82-85.
[4] Tan siyun, Zhou jianzhong, “Intelligent Controller-Nine-point
Controller[in Chinese],” journal of Huazhong University of science and
technology (nature science edition), 2003, vol. 31, no. 12, pp. 41-44.
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238882],资料为PDF文档或Word文档,PDF文档可免费转换为Word

