
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
运动摩托车线控制动器自适应串级控制
Fabio Todeschini, Matteo Corno, Giulio Panzani,
Simone Fiorenti,and Sergio M. Savaresi
摘要:本文描述了一种适用于赛车应用的线控制动系统的串级控制结构,该系统由电机、减速器、主缸和传统的液压制动器(管、钳)组成。从面向控制的模型出发,提出了一种串级控制。内环控制位置,外环控制压力,外环采用自适应机制,以应对位置-压力关系固有的时变非线性。证明了压力回路的稳定性和鲁棒性。由专业骑手在测试电路上对装有仪表的摩托车进行了广泛的实验验证,显示了系统的性能。
关键字:自适应控制,汽车,线控制动(BBW),非线性控制
1 介绍
在过去的几年里,汽车工业一直在寻找创新的线制动(BBW)解决方案:这将提高车辆性能和安全性。平稳而精确地施加所需制动力矩的可能性是许多车辆动力学控制[1]~[7]和自主车辆的基础。
目前已经提出了不同的技术解决方案:电液式液压系统(EHB)基于液压系统,通过电子装置控制的电机或泵来启动[8]~[11];机电制动(EMB)解决方案没有液压部分,但有一个电机作为执行器,能够提供制动扭矩[12]~[14]。一种特殊的电磁制动技术被称为楔块制动,在这种技术中,电动机控制楔块上的力,从而前后推动制动片[15][16]。本文考虑了文献[17]~[19]中首次提出的一种改进的EHB解决方案:一种机电作动器,它前后推动连接到传统液压制动器的主缸活塞。与已知的EMB和EHB解决方案相比,该方案的优点是只需添加执行器就可以保持通常的液压布局,这样可以节省重量、空间和成本。在这种架构下,执行器控制问题包括跟踪所需的压力。如后文所示,由于系统的非线性(摩擦、制动液储液罐的存在、温度变化和油液压缩性)和非常苛刻的性能规范,控制问题变得非常重要。BBW系统是为赛车应用而设计的,在赛车应用中,带宽必须大于10Hz,无超调和良好的鲁棒性。对于技术限制,在制动结束时,主缸活塞必须在制动储液罐进口之前缩回,以便实现适当的油液补偿。如后文所述,这将引入非线性的控制系统。此外,控制系统必须对所谓的nock-off具有鲁棒性。在赛车应用中,有时制动盘会在制动结束时向后推制动片,这将导致位置压力特性的变化:在制动动作中,主缸必须比前一制动动作移动得更远,然后,在这个异常的制动事件之后,系统将恢复正常行为。这种情况也发生在传统的刹车。专业飞行员会感受到操纵杆上的复位力产生的撞击,一旦检测到,他们就可以通过再拉一下制动杆来进行补偿。
据作者所知,除了作者以前的作品外,没有其他的摩托车EHB控制的例子。作者表明[19],需要比简单的线性压力控制器更复杂的控制器:直接压力控制器的闭环响应显示出较大的过冲,从而妨碍了其在本应用中的使用。 在[17]中,通过避免完全缩回活塞即可解决该问题。这样,以不补偿流体体积变化的风险为代价,获得了良好的压力跟踪性能。 此外,始终对制动衬块施加很小的压力:这会导致能量损失和连续的制动衬块磨损。在[18] [19]中,提出了一种混合位置压力切换控制策略,这样,通过位置控制,可以补偿每次制动事件结束时的液体体积变化。但这种结构的主要问题在于,在制动作用的第一阶段(启用位置控制器时),不能直接控制压力。因此,如果在确定的位置-压力图中存在小的误差,则会影响控制性能。此外,在[18][19]中也提出的架构存在鲁棒性问题。
在本文中,通过自适应串联控制体系结构解决了上述缺点,该体系结构保证了所需的性能并提高了针对外部干扰的鲁棒性。此外,实验结果证明了控制系统的有效性。
本文的结构如下:在第二节中,对系统进行了简要描述;在第三节中,得出了面向控制的模型,对其进行分析,提出了一种串级位置-压力控制架构。在第四节中,采用灰盒识别方法得出系统模型,然后将其用于调整压力和位置环。由于压力控制定律是非线性的并且随时间变化,因此要进行稳定性分析(请参阅第五节)。最后,第六节显示实验结果,第七节显示结论。
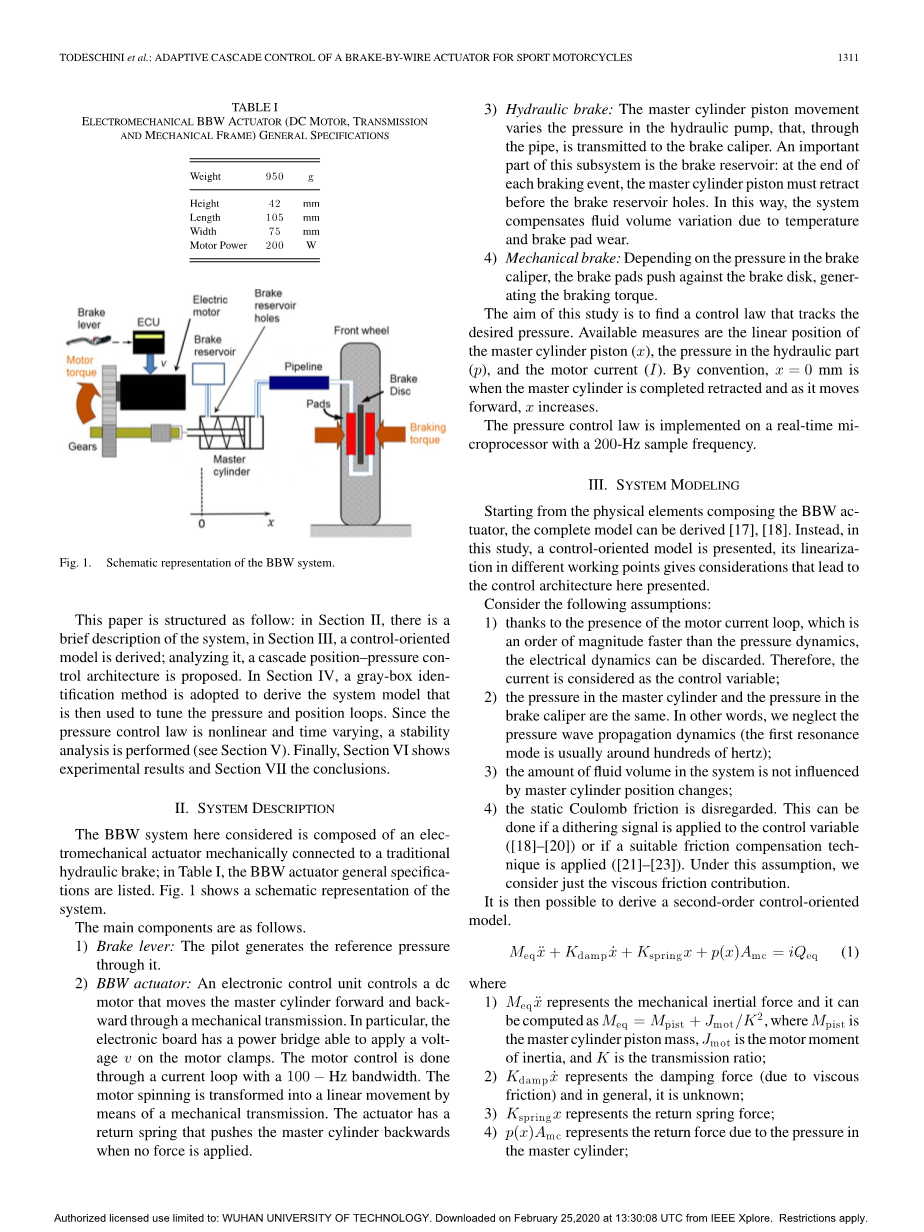
表I机电BBW驱动器(直流电机、变速器和机械框架)通用规范
功率
宽度
长度
高度
重量
图1功率BBW系统的示意图
衬块
管路
制动力矩
制动盘
前轮
制动预留孔
控制缸
齿轮
电机转矩
制动杆
2系统描述
这里考虑的BBW系统由机械连接到传统液压制动器的机电执行器组成;在表I中,列出了BBW执行器的一般规范。
图1为BBW系统的示意图,主要部件如下:
1)制动杆:通过它产生压力。
2)BBW执行器:一个电子控制单元控制一个直流电机,该电机通过机械传动装置前后推动主缸。另外,电子板具有能够在电机上施加电压v的功率桥,电机控制通过具有100Hz带宽的电流回路完成。通过机械传动,电机旋转能够转化为直线运动,执行器有一个回位弹簧,在没有施力的情况下将总泵向后推。
3)液压制动:主缸活塞的运动改变液压泵中的压力,液压泵中的压力通过管道传递给制动钳。该子系统的一个重要部分是制动储液罐:每次制动事件结束时,总泵活塞必须在制动储液罐孔之前缩回,这样,系统可以补偿由于温度和制动片磨损而引起的油液量变化。
4)机械制动:根据制动钳中的压力,制动片推动制动盘,产生制动力矩。
这项研究的目的是找到一个控制方法,跟踪期望的压力,可用的测量方法是主缸活塞(x)的线性位置、液压部分的压力(p)和马达电流(I)。按照惯例,主缸完全缩回时x=0 mm,当它向前移动时,(x)将增加。
在采样频率为200hz的实时微处理器上实现了压力控制方法。
3系统建模
从构成BBW驱动器的物理元件开始,可以导出完整的模型[17][18]。相反,在本研究中,我们提出了一个面向控制的模型,其在不同工作点的线性化考虑了导致本文所提出的控制架构。
考虑以下假设:
1)由于电机电流环路的存在,其速度比压力动态特性快一个数量级,可以忽略电气动态特性,因此电流被视为控制变量;
2) 主缸中的压力和制动钳中的压力相同。换句话说,我们忽略了压力波的传播动力(第一个共振模式通常在几百Hz左右);
3) 主缸位置的变化不影响系统中的液量;
4) 静态库仑摩擦被忽略。 如果将抖动信号应用于控制变量[18]~[20],或者如果应用了适当的摩擦补偿技术[21]~[23],则可以执行此操作。 在此假设下,我们仅考虑粘性摩擦。
这样就可以导出一个面向二阶控制的模型:
(1)
其中:
——机械惯性力,计算公式,其中为主缸活塞质量,为电机惯性矩,K为传动比;
——阻尼力(由于粘性摩擦),一般来说,它是未知的;
——回位弹簧力;
——由于主缸中的压力而产生的返回力;
——电机施加在主缸活塞上的等效力,可计算为KT/K,其中KT是电机 扭矩常数。
图2主缸位置和压力与新刹车片和磨损刹车片的关系
操作空间
位移/mm
旧制动衬块
新制动衬块
死区
压力/bar
表II BBW构件物理参数
模型参数见表II,它们可以从BBW物理组件中找到,唯一未知的参数是。为了建立位置和压力之间的关系模型,我们利用了当应用一个增大的电流斜坡后接一个减小的电流斜坡时系统的准静态实验响应,如图2所示(在30 s内从0A→10A,然后从10A→0A),这是一张非线性静态地图。
位置-压力图可以分为两个不同的区域(见图2):在死区,主缸位于制动储液罐之前,活塞在无压力变化的情况向下移动,死区不受温度和制动片磨损的影响。位置-压力曲线的第二部分是工作区:主缸在制动储液罐之后,位置增量对应于压力增量。位置-压力曲线的这部分受温度和制动片磨损的强烈影响。指的注意的是,图2中所示的位置-压力图显示较为滞后:为了建模,所以考虑平均曲线。位置-压力曲线在模型(1)中引入了时变非线性,因为它随温度和衬垫磨损而变化。
线性化模型允许对非线性效应进行量化,分析了两种不同的动力学:电流-位置动力学和电流-压力动力学。考虑线性化模型:
(2)
其中:
(3)
是工作点()上压力-位置图的斜率。当前和位置之间的传递函数是
(4)
其中,与相比,则是微不足道。从(4)可以看出:
1)低频增益为:
(5)
因此,它随着工作位置的增加而减小。
2) 高频增益为:
(6)
独立于工作点。
同样,通过调用线性化链接,可导出电流和压力之间的传递函数。
(7)
然后,分析得到的传递函数:
1)低频增益为:
(8)
因此,它独立于工作点。
2) 高频增益为:
(9)
它依赖于工作点(它的增益也随之增加)。
4控制系统的设计
传递函数分析是控制结构设计的基础。控制架构必须处理死区的存在(在死区中严格需要位置控制器)、不同的工作点以及位置-压力图的变化。利用位置传递函数在一定频率以上独立于工作点这一事实,一个特定调谐的线性位置控制器可以使闭环对工作点具有鲁棒性。
此外,还需要一个外部压力回路:事实上,由于温度和衬垫磨损,位置-压力图是时变的,因此仅采用位置控制在压力跟踪方面是不精确的。这些将考虑位置-压力串级控制体系结构(见图3)。
在识别阶段,我们采用了灰盒识别方法,利用前一节导出的面向控制的模型,在确定控制结构的同时,确定传递函数的阶数。
4.1位置环
本部分的目的是设计一种位置环,该环能够以约50Hz的闭环带宽跟踪参考量。当前到位置的模型识别是在不同的工作点()周围执行的,该系统通过频率为1Hz的带宽位置控制器维持在()附近。励磁信号是作为负载扰动加到回路中的多频正弦电流,激励信号的频率范围从10Hz到200Hz,这与我们想要达到的目标是一致的。
位置控制器
压力控制器
频率/Hz
相频/角度
图4识别不同工作点的电流→位置传递函数
幅频/分贝
图3位置-压力串级控制
应该注意到,在辨识过程中,由于闭环带宽较励磁信号频率低,控制动作与励磁信号在频率上是解耦的,同样的过程是在不同的工作点周围维护系统,对于每个工作点,输入(电流)和输出(位置)被收集,所以每个工作点周围的频率响应可以导出(见图4)作为交叉功率谱密度输出()和输入()的商,即,通用频率响应计算如下:
(10)
图4示出了在不同工作点中从10~100Hz的识别频率响应,在10Hz之后它们的收敛性可以理解,这证实了第三节的分析。从该分析来看,频率响应的相位应为-180°,实验频率响应在10hz附近的相位损失是由电流位置传递函数所具有的低频极点决定的,而两极的位置受工作点的影响(见(4))。相反,100Hz左右的相位差是由输出信号在这些频率下的低能量引起的。
位置Ref
位置Meas
图5位置回路验证
时间/s
位移/mm
位移
电流
电流-位置辨识证实了第三节中所进行的分析,因此,设计一个带宽大于10hz、相位裕度宽的位置控制器,使用固定结构的线性控制器保证相对于工作点的鲁棒性。在最坏情况下,使用经典的环路成形技术设计PID控制器,以获得相位裕度=85°的50hz带宽,图5绘制了采用所设计控制器的闭环位的置阶跃序列,实验验证了控制回路的鲁棒性和性能。
4.2 压力回路
最终的控制目标是压力跟踪,并且由于位置-压力关系具有滞后性并且随时间变化,因此单独的位置回路是不够的,因此需要压力回路。压力回路必须处理图2所示的位置-压力非线性,并且必须在每种情况下都提供相同的跟踪性能。 由于在死区中压力的增长可以忽略不计,因此压力控制器将设计为在操作区工作。 但是,为了解决死区的存在,提出了一种监督有限状态机,该机器可以确保适当的控制器在整个位置-压力图上正常工作。
在串级结构中设计压力控制器时,所关心的控制变量是参考位置,因此,确定了基准位置——压力传递函数。所采用的识别方案利用了前一小节设计的位置控制器:注入多频参考位置,其平均值确定了进行识别的工作点。收集系统输入(参考位置)和输出(压力),可以从输入/输出交叉功率谱密度(图6中的实线)计算每个工作点的传递函数。
图7压力控制问题的示意图
控制系统
压力控制器
图6确定参考位置
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238447],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

