
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
一种通过主-从方法控制的模块化小型水下机器人机械臂设计,构建和测试
Loris Barbieri*, Fabio Bruno, Alessandro Gallo, Maurizio Muzzupappa, Maria Laura Russo
摘要:在过去的几年里,水下探索已经向更加小型化的 ROVs(远程操作运载工具)有了广泛应用发展。因此,为这些潜水器配备机械臂的需求目前也在增加。针对这一需求,本文提出了水下机器人系统的三种创新解决方案。首先,本文提出了一种适用于小型水下机器人臂的模块化结构。机械臂的模块化设计支持多种不同的配置,每一种配置都由相关的自由度表示,并根据要执行的应用程序的类型进行部署。其次,机械臂已经配备了利用增材制造技术生产的自适应夹具,能够很容易地抓住不同形状的物体。最后,水下机械臂是通过主从方法来控制的,这种方法是为商用现成的电子产品设计的,一方面可以大大减少材料的消耗,但在另一方面,需要在软件开发上付出更大的努力。为测量和评估机器人机械臂的抓取和操纵能力以及所提出的控制系统的性能,进行了实验测试。
1.介绍
如果在某些特定条件下进行水下探索,可能会给作业人员带来危险。这就是为什么水下侦察是由装备了一个或多个机械臂(UVMS -水下机械臂操作系统)的无人潜水器进行的。一小部分的AUVs (自动水下机器人)试验(Lane et al., 1997;Marani et al., 2009;Yu et al., 2013;项等,2015;),通常主要在ROV(远程操作车辆)系统上实现。最近,由于小型车辆上用的机器人具有高度可移植性和更小的尺寸,它们的使用变得越来越普遍。但是,由于它们的轻量化设计,它们只可以配备1或2个自由度的简单执行工具,目前只有少数几个具有关节机械臂的观察者机器人配备有铰链式机械臂(Sakagami et al., 2010;Ambar和Sagara, 2015)。在水下操纵中,末端执行器起着重要的作用。关于有影响力的手爪,科学文献提出了拟人化的工具,有三到四根手指(Mouri et al., 2002;陈,2012;)和非拟人化的,有三个关节的手指(Cabas和Balaguer, 2005;Bartolini等人,2000)。这些钳子的手指不灵活,不适合进行精确的操作任务,如考古发现的恢复或生物标本的收集。基于这个原因,近几年来,有一种趋势是设计一种自适应的夹持器,使其手指能够广泛适应各种物体的夹持。
关于机械手的控制,市场提供了大量水下应用的机器人控制系统可以参考,但这些产品由于其复杂的控制结构而价格昂贵。基于这些考虑,本文介绍了UVMS领域的三个创新成果:
1)一种可安装在观测器类ROVs上的轻量级模块化机械臂架构。模块化的特点是能够具有各种具有不同自由度和动态模型的关节。
2)具有可互换手掌的自适应夹持器,可方便地集成2指和4指元素,并通过灵活的结构实现形式锁定夹持,允许快速可靠地处理不同形状的物体而不会造成任何损害;
3)主-从控制系统采用商用现货电子产品设计,大大降低了硬件成本。为了提高控制系统的可用性,设计了主机械手来复制从机械手的运动学。
本文详细描述了所提出的解决方案的设计和第一个物理原型的评估,以验证其可行性,并揭示其设计和控制系统的优缺点,然后进行进一步的改进。
论文组织如下。第二部分介绍了模块化水下机器人机械臂的结构,第三部分介绍了自适应抓手的设计。机械手的物理原型如图4所示。第五部分介绍了所提出的主从系统、遥操作控制体系结构和实验结果。最后,第六部分给出了本文的结论。
2. 水下机械手的结构
2.1 机械臂的设计
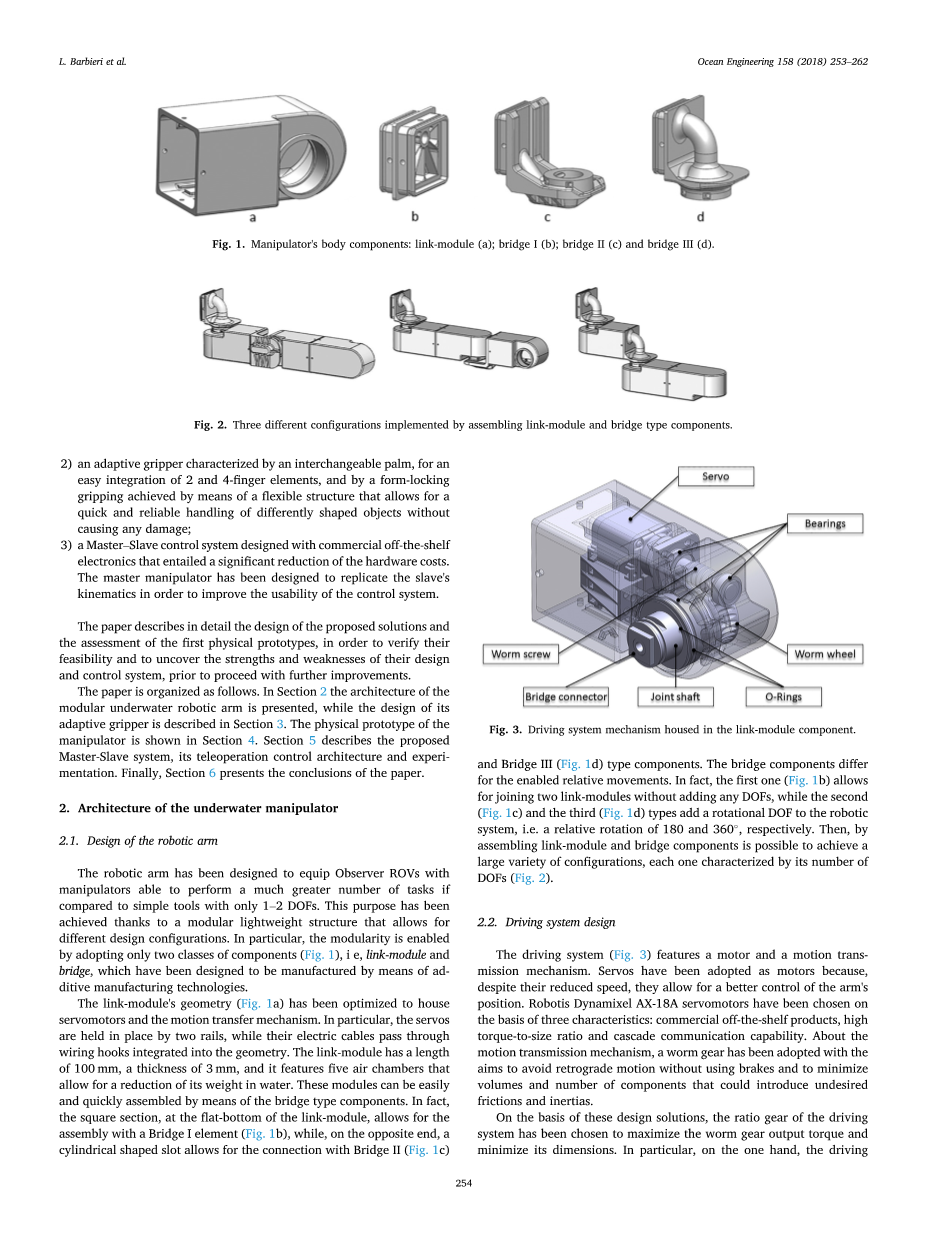
机械臂的设计目的是,与只有1-2个自由度的简单工具相比,为观察机器人配备能够执行更多任务的机械手。这一目的的实现得益于模块化的轻量级结构,允许不同的设计配置。特别地,模块化是通过只采用两类组件(图1)来实现的,这两类组件分别是:链路模块和桥接器,它们是通过增材制造技术来制造的。
链接模块的几何形状(图1a)已优化,以容纳伺服电机和运动传递机构。特别是,伺服系统由两条轨道固定,而电缆则通过集成到几何结构中的接线钩。连接模块的长度为100毫米,厚度为3毫米,它有五个空气室,可以减少其在水中的重量。通过桥式组件可以方便快捷地组装这些模块。事实上,在连接模块的平底处的方形部分允许与桥I元件进行组装(图1b),而在另一端的圆柱形槽则允许与桥II(图1c)和桥III(图1d)类型组件进行连接。桥组件因启用的相对移动而不同。事实上,第一个(图1b)允许连接两个链接模块而不添加任何自由度,而第二个(图1c)和第三个(图1d)类型为机器人系统添加了一个旋转自由度,即分别相对旋转180°和360°。然后,通过装配链路模块和桥接组件,可以实现各种各样的配置,每一种配置的特点是其自由度的数量(图2)。
2.2 驱动系统的设计
驱动系统(图3)具有电机和运动传动机构。伺服系统已被采用作为马达,因为尽管他们的速度有所降低,但是能够更好地控制机械臂的位置。Robotis Dynamixel AX-18A伺服电机具有三个特点:商用现货、高扭矩-尺寸比和级联通信能力。在运动传动机构方面,采用蜗轮蜗杆传动,以避免在不使用刹车的情况下逆行运动,减少可能产生不必要摩擦和惯性的部件的体积和数量。
在这些设计方案的基础上,选择了驱动系统的比例齿轮,使蜗轮蜗杆的输出扭矩最大,尺寸最小。特别是一方面,系统的输出转矩取决于所定义的比例齿轮,蜗轮效率和伺服的失速转矩(高电压12v时分别为0.22和1.8 Nm)。另一方面,蜗轮直径受伺服尺寸(32*50*40mm)、螺杆的线圈数、齿轮的比例影响。因此,为了满足上述两方面的要求,采用了30:1的减速比——提供一个驱动系统11.9 Nm的输出扭矩。
如图3所示,即插即用的设计是通过一个方形截面轴实现的,轴与车轮是一体的,它简化了桥式组件的装配,由两个螺丝固定。此外,三个滚珠轴承可以减少蜗轮的径向载荷,而两个o形环用于水密。
特别是,横截面视图,描述在图4中,显示了三个丁腈橡胶o型环型前两个是致力于防水密封传动机构及其住房和应用于圆柱接触表面之间的支持和链接模块,支持和旋转接头的一部分。第三个安装在连接轴的下部,与桥II(或III)部件的内圆柱面接触,保证第二个连接模块部件的水密性。采用厂家提供的设计规范进行了动态密封防水设计。根据ISO 3601标准,从连接轴和止动器的沟槽直径、内径直径和直径间隙(图4)开始,定义了合适的o形环尺寸。特别是安装在连接轴上的o形环直径为20.88 mm,横截面为1.78 mm,而安装在支架上的o形环内径为33.05 mm,横截面为1.78 mm。
2.3 模拟和分析
为了在水下环境中模拟和验证模块化机械臂的可靠性和完整性,在进行物理原型制作之前,对模块化机械臂进行了有限元分析。特别是,考虑到用了增材制造的材料:PA2200,一种高强度和高刚度的聚酰胺;以及GP1,一种预合金不锈钢,链接模块已经进行了静态分析。结果表明,钢构件(图5a)在最大工作深度(即海平面以下300米,水压为3.1 MPa)下仍能保持完整的功能,安全系数为1.9。相反,图5b所示的聚合物组分在海平面以下30米的最大深度处承受0.4 MPa的压力。一个中间设计解决方案,允许安全操作在中间深度,高达100米,可以达到采用聚合物组件与金属钢插入。
还进行了其他分析,以验证水密密封的有效性,该密封受到o形环工作压力范围的影响。根据o形环生产商提供的技术文件,对模块-连杆进行的分析结果表明,外壳的防水性能没有受到影响。特别地,在深度为30 m时,聚合模量链组件的位移为0.42 mm,不超过0.59 mm的上阈值。对于钢构件来说甚至更好,它在300米深处的位移为0.027毫米,远远低于上限。
3. 手爪的设计
机械手的末端执行器(EE)是一个机械夹具(图6),具有自适应手指,可以处理不同形状的物体,并确保有效的抓地力。它被通过类型2的桥接部分连接到机械臂上,这个桥接组成部分已经被修改和加强过以用来承受垂直和扭转载荷。
EE的壳体内部有机械部件和两个执行器:一个用于手腕旋转,另一个用于手指运动。EE的特点还包括一个可互换的手掌(图7),根据不同的要求,可以用两根或四根手指轻松快速地更换夹持器。
腕关节的运动是由一个齿轮和一个冠轮耦合而成,齿轮与伺服马达轴是一体的。而手指的运动是由欠驱动的自锁机构实现的(图8),其中蜗轮由电动执行机构驱动,通过两对齿轮将运动传递给手指。特别地,伺服马达通过一个机械转接器,驱动一个由两个滚珠轴承调节的蜗杆。一种具有加强机构功能的止动器,可以阻止蜗杆旋转所产生的轴向载荷。
手指的关节是根据如下图所示的拟人化运动结构设计的。它是一个模拟手指运动的简单机械连杆系统。
如图9所示,手指机构由两个指骨组成,允许一个2自由度的旋转运动。特别是,由于第一指骨的设计模仿螺旋弹簧与弹性模量K,齿轮,其旋转轴定位在O1,拖动整个手指的结构,提供了第二指骨的驱动。当第一个方阵与一个物体接触时,它的反作用力锁住了旋转,运动结构的其余部分通过曲柄上产生的允许90度的力矩来移动。
从第一指骨和第二指骨的长度(分别为68毫米和61毫米)开始,手指部件的尺寸是根据上面描述的运动学模型确定。选择性激光烧结技术的采用可以最小化末端执行器机械结构和建立轻量且灵活的结构,如弹簧的第一方阵的四边形和“鳍条模式”结构受费斯托FinGripper设计(威尔逊,2011)——需要第二方阵的自适应控制。
4. 机械臂和夹具的模型
利用增材制造技术制造了水下机械手的物理样机。特别地,选择性激光烧结(SLS)已被用于构建聚合物组件,如机械臂的模块部分和夹具的自适应手指。所用的聚合物为PA 2200,与传统聚酰胺相比,具有更高的熔点和更结晶的结构。与此同时,直接金属激光烧结(DMLS)已被用于制造齿轮系零件的原型,如不锈钢GP1材料的轴和螺丝。
图10为原型和测试所选择的参考配置,以及控制系统的实现。它由一个五自由度的结构组成,由三个带有桥接组件和夹具的连接模块组成。这种配置允许机器人机械臂移动和操作其夹持器进入一个工作区域(图11),在机器人结构的上方和下方都有锥形的死区,这是由于该特定布局中采用的链接模块施加的物理限制造成的。
水下机器人的物理原型已经在空气和水中,在实验室的水池中进行了测试。此外,还成功地在一个压力为4atm的水动力室中测试了静止状态下的机械手。
对不同形状的物体进行抓取实验(图12),即圆柱形、球形和可弯曲形状的物体,在水中的最大重量为1.5公斤。
测试表明,不同于目前使用的微型ROV机器人,该机器人机械臂只有扣环能力,由于其模块化的结构设计可以实现多个自由度,因此可以模仿工作类机器人的能力。自适应夹具能够抓取和处理大量不同形状、大小、表面和纹理的物体。
5. 主从控制
本节介绍主从控制系统。首先,为了在主设备的设计中复制所选择的原型和测试的机械臂的运动学模型(图10),我们进行了推导。随后,定义了远程操作控制体系结构,确定了要实现的硬件和软件。最后,通过实验验证了该远程操作系统的有效性和局限性。
5.1 机械臂的运动学模型
采用Denavit-Hartenberg (DH)法确定了用于原型制作和测试的具体机械臂的直接运动学模型。通过这种方法,可以利用齐次矩阵计算出EE的坐标系相对于基础坐标系的位置,Ethat考虑了关节变量和连杆长度。具体来说,5自由度机械臂构型(图13)包括5个连杆,包括基座和末端执行器和五个关节。特别是,三个关节允许肩膀和肘关节的旋转和机械臂的抬高,而最后两个关节与EE有关,用于旋转手腕旋转和打开/关闭手指。
齐次变换矩阵的臂端基坐标系是:结核病;Efrac14;T0; 1 t1, t2, 3 t3; 4。,其中前三个基本变换,即 根据DH惯例,通过定义以下参数:关节角theta;i,连接件的长度 ,链接扭转角alpha;i,进行计算。下表1给出了DH参数,其中R和D分别是转动矩阵和平移矩阵。一旦定义了DH参数,就将它们整合到下面的公式中,从而得到变换矩阵:
EE不遵循DH约定,因此最后一个坐标变换矩阵,即、T3; 4,推导如下:
5.2 主动件设备的设计
主动件设备(图14)被设计来复制从臂的运动学,并具有手柄的高人体工程学特征。主臂采用模块化结构,包括四个主要元素:伺服马达、连接器、手柄和触发器。特别是,它的特点是5个XL-320驱动器与一个完全集成的电机和伺服模块。如下图中所示,四个伺服马达已经被肩关节、肘关节和腕关节使用。五分之一已经采用伺服电动机来驱动的打开/关闭从动设备的钳子的触发器。采用伺服马达的小尺寸允许1:2的比例因子之间的链接长度主动设备和从动设备设备。所有的伺服电机都是通过专门设计的连接器组装而成,并通过3D打印技术实现。同样的技术也被用于触发器和人体工程学手柄的制造。
在主臂的设计中,伺服马达比编码器更受青睐,因为伺服马达有助于提高主-从控制系统中阴影技术的效能。事实上,多亏了伺服电机,当主臂的一个姿势固定下来时,它会保持这个位置并等待新的指令。此外,当系统通电或支持校准程序时,可以定义要达到的预定位置集。
5.3 遥控操作
由于机器人机械臂的模块化,每个模块都必须在局部进行控制,独立于机械手的配置。然后采用独立的联合控制策略(Siciliano et al., 2010)来实现这一目标。它是一种分散控制技术,其中关节是解耦的,其动力学模型是一个固定的线性二阶系统,加上一个
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238389],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

