英语原文共 9 页
考虑道路倾斜的车辆队列速度优化设计
Balaacute;zs Neacute;meth, Peacute;ter Gaacute;spaacute;r
匈牙利科学院计算机科学与控制研究所系统与控制实验室,匈牙利
电子邮件:gaspar@sztaki.hu
摘要:本文研究了一种考虑行车安全的队列控制系统的设计,该系统利用队列稳定性定理和道路沿队列的倾斜度,设计了一种车辆队列控制系统。通过选择与道路倾角相适应的队列行驶速度,可以减少不必要的加速和制动次数,从而可以减少车辆的执行机构,即传动系统和制动系统的运行。虽然车辆的纵向动力学是在线性控制导向模型中制定的,但基于队列稳定性的道路倾角非线性性能和安全要求也被考虑在内。车辆队列控制系统是基于鲁棒控制理论设计的。
引言与动机
本文提出了一种考虑节能和油耗的队列系统节能方法。“队列”一词用来描述在自动控制下运行的多辆车,它们以相同的速度行驶,车与车之间的间隔相对较小。在增加公路运力和降低油耗方面,队列作业可能具有优势。
车辆队列控制的想法是由智能公路系统(ITS)和道路基础设施推动的,参见加州的PATH计划和日本的MOC计划。PATH先进交通技术的合作伙伴伴涉及车辆高速公路合作和通信,以及驾驶行为调查科学。在队列控方面,对一类互连系统队列稳定性进行概括,并寻求保证队列稳定性的充分条件,见[1~3]。MOC/ITS技术的发展旨在节约能源和减少道路交通中的二氧化碳排放,包括自动化重型卡车队列得研发。在该项目中,减少队列内车辆的间距,这将节约能源并减少排放。欧洲计划以现有的道路网络和基础设施为基础,主要侧重于配备现有传感器和执行器的商业车辆,见[6~8]。这些项目的主要目标是检查各队列在公共高速公路上与其他车辆充分互动的情况。队列中每辆车的安全性和稳定性都由队列稳定性来保证,如[3,9]。
在《燃料最优智能交通系统》这一专题中,已经发表了一些模型和控制策略。Rakha等人提出了一种简化的智能车辆动力系统模型。该模型通过现场测量进行了测试,并演示了车辆功率、燃料消耗、加速度、速度和位置的估计。Faris等人对车辆油耗和排放的几种建模方法进行了分类,如微观、中观和宏观建模方法。在[12]中提出了一种结合主成分分析的道路类型和拥堵等级估计方法。该方法可用于多种用途,如交通信息系统、智能实时车辆控制系统和能源消耗/排放估算。[13]提出了一种基于车辆运行和排放物理现象的模型排放建模方法。在[14]中提出了一个生态巡航控制系统,该系统利用道路地形数据优化油耗。
在匈牙利卡车项目中,研制了一个由重型车辆组成的自动化车队列。该项目的目标是分析控制算法并综合实验结果。Rodonyi et al等人提出了几个与连接、耦合、驱动行为、技术故障等相关的问题。在本项目框架内,我们正在开发一种专门为商用车辆平台设计的系统,在该系统中,传统的定位方法(如GPS)与车辆传感器提供的其他数据(如速度、横向加速度和雷达)一起管理。车辆采用分布式控制方式在队列中行驶。在这种系统中,由于定位和通信的不确定性,可能会产生不同类型和大小的幅值。这些主要是纵向的,但一些路段可能产生横向振幅。除了舒适度较低外,这些振幅给交通安全带来了隐患。速度剖面优化的初步结果可以在[17]中找到。
本文提出了一种利用路面倾角计算最优纵向力的控制设计方法。在控制设计方法中,额外的知识,如道路倾角和速度限制被考虑在内。这种方法是基于道路信息是可用的这一假设。通过选择适当的速度,可以大大减少不必要的加速和制动次数及其持续时间。因此,执行机构所需的能量和燃料消耗可以减少。
为了更好地理解控制思想,给出了几种典型的交通情况。第一个例子是一个下坡,车辆的速度增加。如果驱动力提前减小,车辆在进入坡道前速度减小,速度就可以从较小开始增加,随后达到限速。因此,制动系统可以稍后激活,或者没有必要激活。在第二个例子中,道路有一个速度限制,在这种情况下可以有不同的策略,例如突然刹车快速减速或在较长的道路上缓慢速减速。在第二种方案中,可以利用路面的附着系数减少制动器的激活。当车速限制被解除时,也可以得到类似的结果。
在[18 ~20]中,几种考虑道路条件的方法已经被提出了。前瞻控制方法假定有关未来对受控系统的干扰的信息是可用的。在油耗和行驶时间之间找到一个折衷的解决方案会形成一个最优化问题。可以采用用多种方法对这个问题进行优化。在[21]中,通过实际实验对该方法进行了评价。由于该方法可应用于领航车辆,因此可以推广到队列系统中。在这里,为了安全起见,必须考虑队员之间的交互,并保证队列的稳定性。在实际应用中,对道路坡度的预测可以采用两种方法:一种是使用等高线图,其中包含平行线;另一种是采用估计方法。在前一种情况下,用于其他导航任务的地图可以使用坡度信息进行扩展,该信息将在下一次沿着同一路线应用。已经提出了几种估计边坡的方法,分别使用了照相机、激光/惯性轮廓仪、差分GPS或GPS/INS系统。
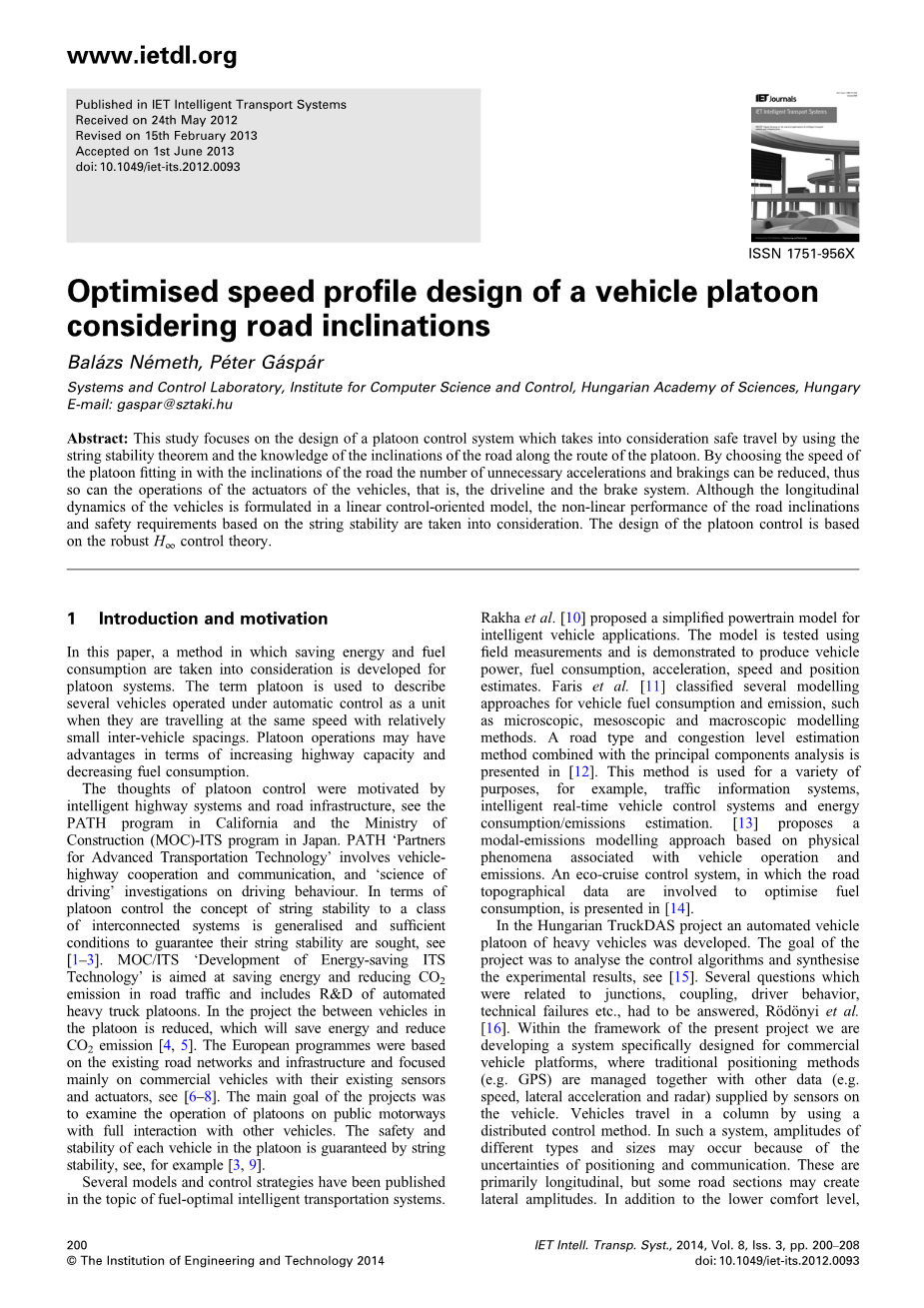
本文的目的是将稳定的队列控制扩展到有条件的路面。利用不同的性能指标,建立了面向控制的队列系统模型。模型的不确定性由忽略的分量和未知的参数引起,也被建模为非结构化动力学。采用鲁棒法设计了队列系统的控制器,既保证了系统的抗干扰能力,又保证了系统对不确定性的鲁棒性。控制队列系统的结构示意图如图1所示。队列控需要各种测量信号,如前车和前车的位置、速度和加速度。因此,队列控制要求将车辆的位置、速度、加速度等信息传递给后续车辆,以保证队列的稳定性。除了这些信号之外,假设道路状况在车辆中可用(道路坡度,速度限制)。由于领航车决定着整个队列的安全、经济运行,因此领航车使用道路条件至关重要。根据这些信号,每个车辆的控制系统可以计算其最优纵向控制力。
图1 队列系统结构
本文的组织如下:第2节给出了道路条件的公式,并给出了通过选择合适的预测权值来优化车辆巡航控制的方法。第三节将最优结果推广到队列系统。第4节给出了基于模型的纵向控制设计。第5节展示了队列控系统在运输路径上的实际操作。
在巡航控制中考虑道路倾角
根据道路倾斜度加权因子
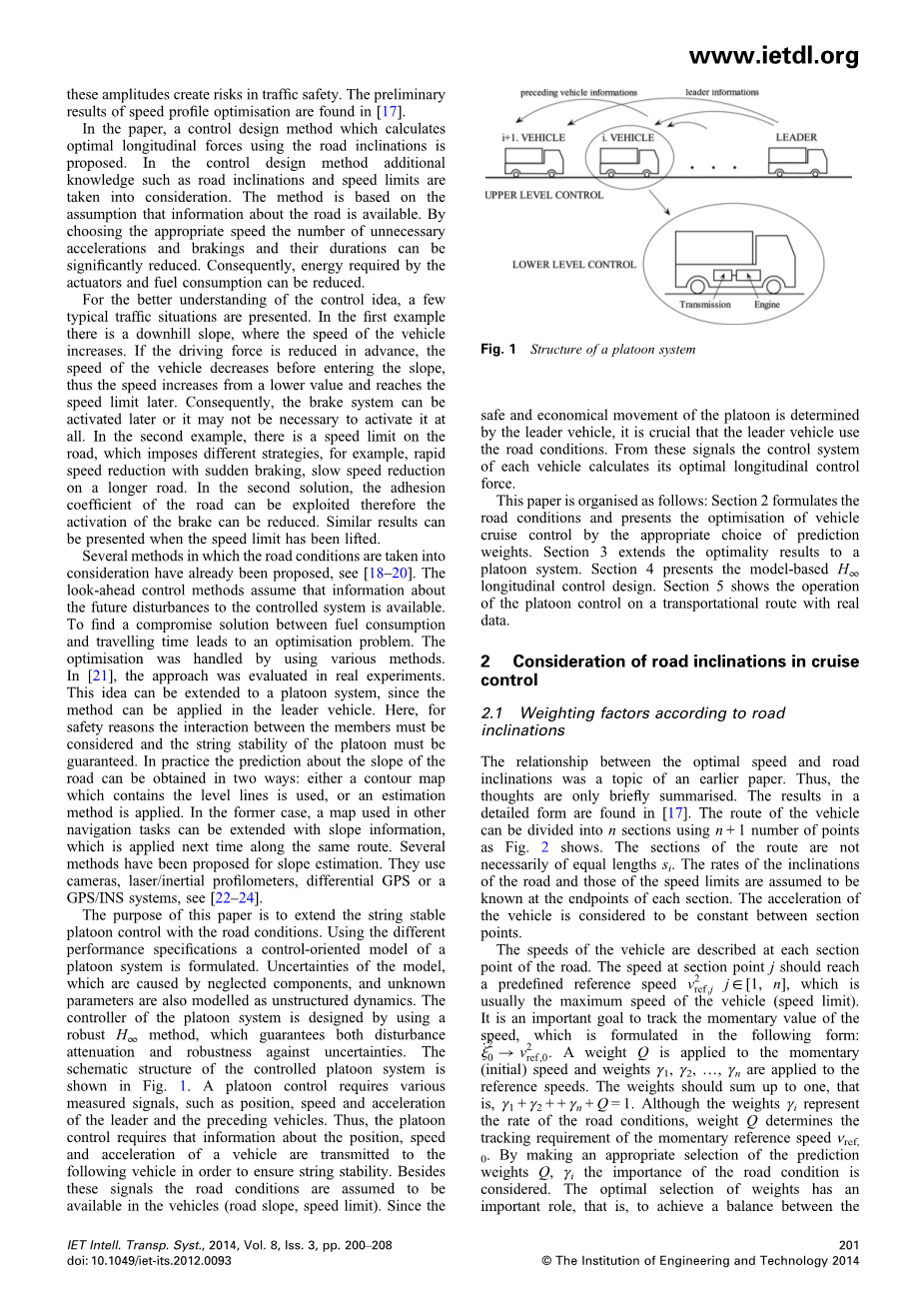
最优速度和道路倾斜度之间的关系是早期论文的一个主题。因此,这些想法只是简单的概括。详细形式的结果可以在[17]中找到。利用个点的个数,可以将车辆的路线划分为n个路段,如图2所示。这条路线的各段长度不一定相等。假定在每一路段的终点处都知道道路倾斜的速度和限速的速度。车辆的加速度被认为在各截面点之间是恒定的。
图2 道路的划分
车辆的速度在道路的每个区段点被描述。截面点处的速度应达到预定的参考速度 ,通常为车辆的最大速度(限速)。跟踪速度的瞬时值是一个重要的目标,其表达式如下。重量Q是应用于瞬时(最初的)速度和重量应用于参考速度。权重的和应为1,即。尽管权重代表路况的速率,权值Q决定瞬时参考速度的跟踪要求。通过选择合适的预测权重Q,,道路状况的重要性可以被考虑到。权值的最优选择具有重要的作用,即实现瞬时速度与路面坡度的影响权值之间的平衡,即速度与经济参数之间的平衡。
建立了考虑参考速度和预测权值的面向控制车辆模型。车辆的速度是计算出来的
|
|
(1) |
式中,代表实际的纵向加速度,和代表后续道路的长度和倾角,g代表重力加速度。的值取决于道路的倾斜度,参考速度和预测权重
|
|
(2) |
式中,为第段路面倾角的力抗力。因此,可以通过速度跟踪来考虑路况。的计算需要纵向加速度的测量。
优化车辆巡航控制
在本节中,任务是在考虑控制力的最小化和行驶时间的情况下,找到预测权值的最优选择。车辆巡航控制问题可以分为以下两种优化问题
优化1:纵向控制力必须最小化,即。相反,在实践中常采用的最优化方法,因为它的数值计算比较简单。最小化的优点是同时考虑了驱动和制动操纵。
优化2:瞬时速度和参考速度之间的差异必须最小化,也就是说。
这两个优化标准导致了不同的最优解决方案。在第一个标准中,道路倾斜度和速度限制是通过使用适当选择的权重,来考虑的。同时,如果忽略预测信息,则第二个准则是最优的。在后一种情况下,预测权重应该为,。
第一个准则是满足二次优化问题的公式。它导致如下形式
|
|
(3) |
由于预测权的存在,该任务是非线性的。在第一次优化中,预测权值是固定的,将这个固定的从0修改为1。优化任务采用以下矩阵形式表示:由于优化任务在预测权重意义上是线性的,(3)由下式矩阵表示
|
|
(4) |
上式中,矩阵是,矩阵来自(3)的重排。因此,该问题导致了二次规划任务。本文采用信赖域反演算法,该算法具有较强的收敛性,具有全局收敛性和二次收敛性。信赖域反射算法是基于内反射牛顿法的子空间信赖域方法。每次迭代都涉及到使用预先条件共轭梯度法近似求解一个大型线性系统。
条件分析是至关重要的,因为它与数值解的分配有关。例如,平坦的道路和恒定的速度限制的值大致相同。因为在这种情况下矩阵的元素是相等的,矩阵是奇异矩阵。因此,的计算是困难的或不可能的,的条件数非常高。由于在实际应用中可以得到几种类似的情况,因此应该采用一种能够处理较差调节系统的数值算法。用于此目的的Levenberg Marquardt算法,见[27]。在这种方法中,原始矩阵增加了一个单位矩阵乘以一个很小的数():。由Levenberg Marquardt算法可以显著减少的条件数,这有助于解决优化任务。下一步,导出二次优化任务:。
第二个标准也被考虑在内。由于在不考虑道路条件的情况下,车辆会按照预定的速度行驶,因此可以相对容易地确定最优解。因此,通过以下方法选择权重,得到最优解: 和 。
最后,必须在设计的预测权值的基础上实现两种性能的平衡。选择预测权,满足第一个准则,选择常数预测权 和满足第二个准则。该方法进一步引入了两个性能权重,即和。性能权重与纵向控制力最小化的重要性有关,而性能权重与行驶时间最小化有关。根据性能权重存在约束。因此,性能权重(保证优化任务之间的平衡)按以下表达式计算
|
|
(5a) |
|
|
(5b) |
注意,在这种方法中,由于与,的可比性,有必要对,的值进行标准化。在计算性能权重的基础上,利用(1)可以确定参考速度,在实际应用中,数值计算得到的最优预测权重作为一个跳跃信号可能会发生很大的变化。为了避免这一现象,预测权值被低通滤波器滤波以获得平滑的信号。
基于优化方法的先导速度设计
在本节中,该方法将扩展到队列中的车辆。该设计背后的主要思想是,队列中的每一辆车都能够独立于其他车辆计算自己的速度。由于队列内行驶需要相同的速度,因此必须根据其他车辆调整最佳速度。在队列中,领头车辆的速度决定了所有车辆的速度。目标是确定成员的速度与他们自己的最佳速度尽可能接近的公共速度。
第一步,设定最优预测权值。其中n是除法点的个数。然后修改后的参考速度的车辆。其中m是计算队列内车辆数量。在计算过程中考虑了路面倾角和限速,但没有考虑车辆之间的相互作用。一个队列的每辆车都有自己的最优参考速度。此外,汽车的速度并不是相互独立的,因为领导人的速度影响的每一个成员的速度队列。目标是为前导找到一个最优的参考速度。
<p
资料编号:[5625]</p
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

