英语原文共 20 页,剩余内容已隐藏,支付完成后下载完整资料
印度古吉拉特邦海上风力涡轮机单体桩基础的简化设计程序
- 国家海洋技术研究所海洋结构,印度钦奈600100
- 佛罗里达大西洋大学土木,环境与地理工程系,美国博卡拉顿33431
摘要:OWT(海上风力涡轮机)目前被认为是可靠的可再生能源。OWT的支撑结构占海上风能设备投资成本的20%-25%。为 了进行初始成本计算,需要进行涉及估算风力涡轮机结构初始尺寸的预可行性研究,以实现项目的商业可行性。本文的主要 目的是获得商业可行性的初步配置,并估算基础桩的尺寸。提出了设计方程式和列线图,以快速初步设计位于古吉拉特邦近 海的单桩风力发电机。通过改变水深和砂的性质,对空心单桩的各种构造进行参数研究。考虑了各种结构和土壤参数的空气 动力和流体动力,对子结构进行了非线性静态分析。风力涡轮机的子结构设计基于API(美国石油协会)标准。基于多元线性 回归分析,提出了单桩支撑结构在极限载荷条件下的简化设计方法。回归分析的输入变量是流体动力学数据,砂的内摩擦角, 输出变量是单桩的长度和外径。这种简化的方法适用于风力发电场的预研究。
关键词:OWT,支撑结构,单桩,回归分析,列线图。
1.介绍
通过利用可再生能源,可以实现能源使用和环境 保护的综合观点。可再生能源占印度装机容量的 12.2%,其中70%来自风能部门[l]。目前,由于 风速较高,视觉干扰和噪音低,高容量风力发电机 易于运输,沿海城市的输电成本降低,可利用土地 的保护以及对陆上潜在资源的过度开发等有利因素, 重点已转向海上风能网站。
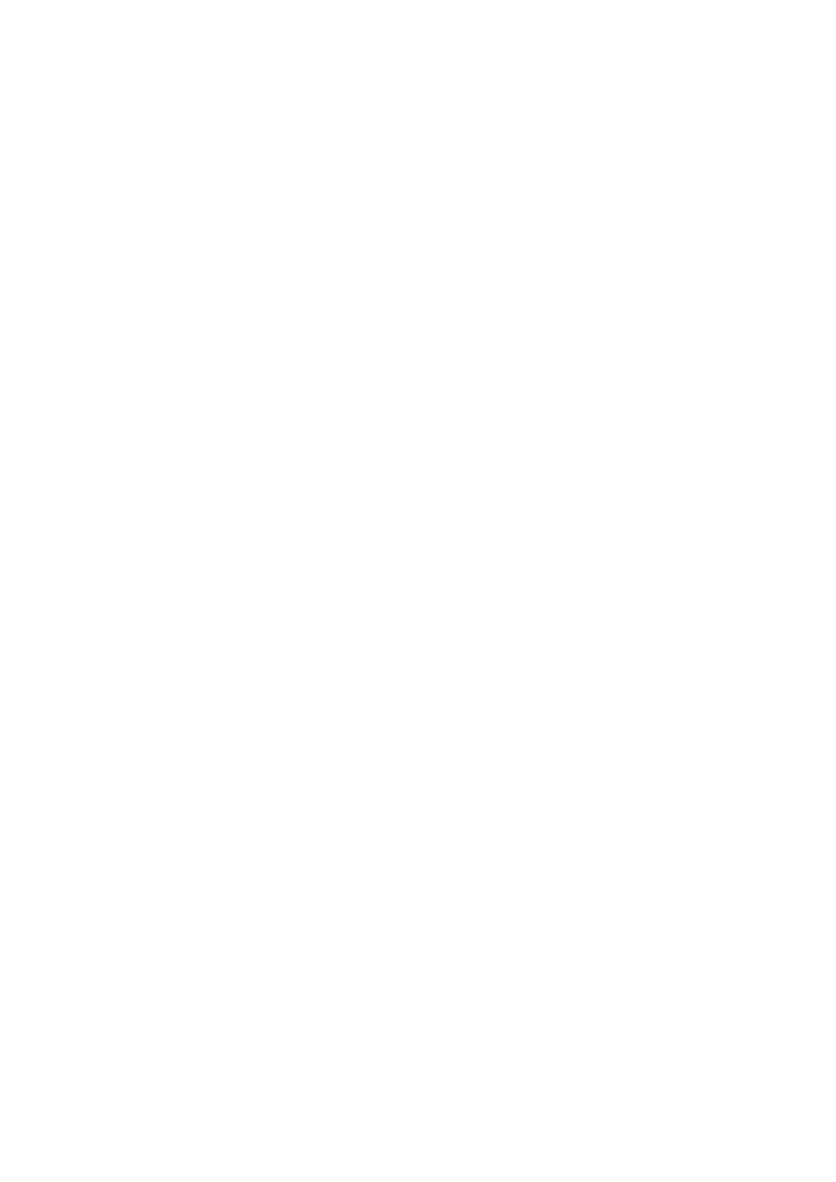
印度目前在陆上排名第五 从历史上可以看出,单桩垄断了海上风电市场。欧 洲(即英国,丹麦,德国和荷兰)的OWT超过75%
全球风电市场,并且尚未开发其海上风电潜力。像丹麦这样的国家几乎有40%的电力来自风电场,其 中约1/4的电力来自海上风电[2]。对于像印度这样 的发展中国家,降低成本效益比将有助于建立海上 风电场,并朝着可持续的能源生产方向发展。MNRE (新能源和可再生能源部)已将印度泰米尔纳德邦的Rameswaram和Kanyakumari的近海地区,古吉拉特邦的Kutch海湾和Kambhat海湾确定为印度潜在的 OWT(海上风力发电机)安装区)。该国第一个海上风电场可能会在古吉拉特邦建成。可行性研究表明,该地区的浅水深度为10 m至20 m,主要土壤为粉砂。对于这些条件,单桩将是理想的子结构解决方案之一
图1按安装年份划分的已完成海上风电项目的子结构类型(4) 因此,对N REL和BTM提供的数据进行导航分析。
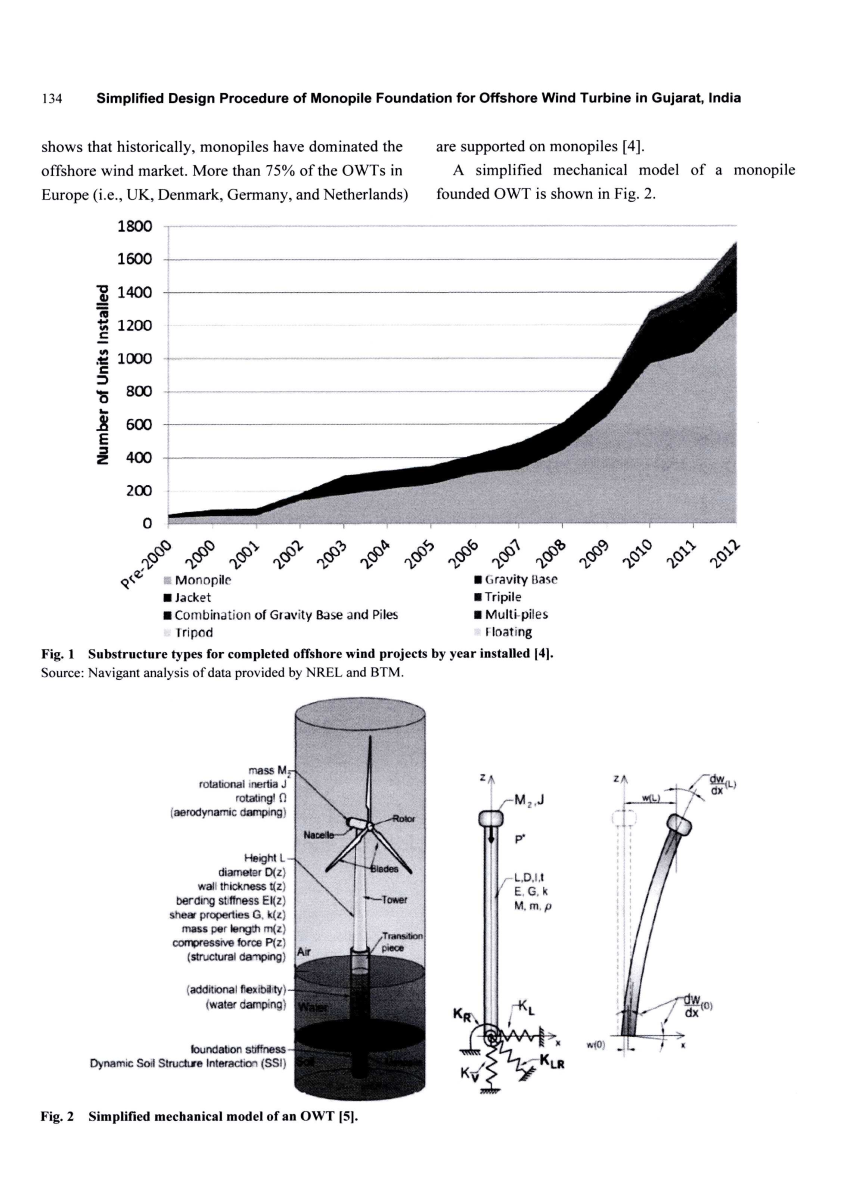
图2 OWT的简化机械模型(5)。
作用在海上结构上的实际载荷在本质上是动态的, 确切的动态载荷很难通过分析研究进行评估[6]。 结构动力学中的载荷识别是一个不适当地的问题, 因为响应仅在连续函数的某些点定义。因此,不能保证唯一的解决方案。此外,经常发现解决方案不稳定,其中输入数据的小扰动会导致计算出的力大小发生较大变化。为了满足质量要求并克服独特解 决方案的不足,研究人员提出了一种ESL(等效静 载荷)。ESL定义为静态载荷,其产生与动态载荷作用下相同的位移场 加载[6,7]。此外,静态分析比动态分析更适合于 预可行性研究,因为它节省了大量的计算时间和精力。本研究使用ESL和非线性分析研究OWT的子结构 设计。 这种方法的新颖之处在于将重要地点联系起来,各工厂的参数和风力发电机基础的初步尺寸标注。
2. 单桩设计方法论
图3显示了获得OWT单桩型子结构初步配置和近 似尺寸的框架。
图3,方法流程图。
使用SACS进行非线性静力分析(结构分析计算机系统)和MLRA(多元线性回归分析)使用统计工具,如MS-Excel和Minitab。
2.1单桩支持的OWT模型
本研究中使用的参考风力涡轮机为5 MW NREL风力涡轮机配置,因为数据可从已发表的文献中获得 [8],并且涡轮机容量与现场改造的相似。 进行建模,分析和设计使用SACS。 图4显示了5 MW NREL风力发电机的SACS 模型。粉质砂的均质层被认为距泥线的深度不超过 60 m。研究中使用了密度为7,850 kg / m3的钢桩和过渡件。表1和表2显示了5 MW NREL风力发电机的结构特性。
图4 5 MW NREL风力发电机的SACS模型
表格1 为NREL 5兆瓦基准风力涡轮机选择的总性能
|
等级 |
5MW |
|
转子结构,配置 控制 |
逆风,3叶片 |
|
动力总成 |
变速,总螺距高速,多级变速箱 |
|
转子,轮毂直径轮 毂高度 |
126 m, 3 m 90m |
|
切入,额定,切出风 速度 |
3m/s,I1.4m/s,25m/s |
|
切入,额定转子速度额定 叶尖速度 |
6.9rpm,12.1rpm 80m/s |
|
悬垂,轴倾斜,前锥 |
5m,5°,2.5° |
|
转子质量 |
110,000kg |
|
机舱质量 |
240,000kg |
|
塔质量 |
347,460kg |
表2塔(8)的属性。
|
底座直径 |
6m |
|
基础厚度 |
0.027m |
|
顶部直径 |
3.87m |
|
顶部厚度 |
O.019m |
|
杨氏模量 |
2lOGPa |
|
剪切模量 |
80.8GPa |
|
钢的密度 |
8.500kg/m^3 |
|
离地高度 |
87.6m |
|
总质量 |
347,460kg |
|
结构阻尼比 |
l% |
2.2非线性静态分析
风是固定OWT结构上的主要负载。计算转子水平 的空气动力需要与风场特性相关的信息,包括风切 变和平均风速[9]。涡轮机上的空气动力学负载为使用NREL(国家可再生能源实验室)基于BEM(叶 片动量)理论开发的FAST获得标准5 MW NREL 风力涡轮机。气动推力的主要频率是通过FFT(快 速傅立叶变换)获得的,适用于各种风况(图5)。 相关信息来自设计标准IEC 61400-1(2005)和IEC 614000-3(2009)
图5快速傅立叶变换。
使用OAF(动态放大系数)将时域中的空气动力学负载转换为ESL。OAF是一个无量纲的数字,它描 述了将动态载荷施加到结构时,应将挠度或应力乘以由静载荷引起的挠度或应力的次数[12]。由于结构无法快速响应载荷,因此动态载荷的作用比相同大小的静态载荷的作用要大得多,因此,根据OAF 来考虑动态载荷作用的增加。为SDOF(单自由度)系统在具有粘性阻尼的情况下经受谐波振动,DAF的计算公式如下。(1)图6显示了由谐波力激励的阻尼SDOF系统的DAF与频率比 的图形表示。
Xdyn=最大动态位移 Xst=最大静态位移 W=强迫频率 Wn=结构固有频率 E=结构阻尼比。
图6阻尼SDOF系统的DAF受到谐波力的作用[12]。
额定风速(ECD R)下方向变化时极端连贯阵 风的频率图为如图7所示。
图7 ECD R风况的频率图。
风轮机结构的第一模态频率(wn1)用 于获得DAF,因为它位于激励频率的75%至120%范 围内,因此,可以预期响应的动态放大[6]。因此, 使用DAF将动态负载转换为ESL。最大推力在涡轮机转子水平上的最大力为1.2 MN 对于ECD R风况,获得的自重为3,434 kN。海湾的极端风速值为50毫秒。
使用IS 875第3-1987部分代码规定[13]获得库奇地 区的坎布哈特和海湾。使用基于API标准的SACS软 件工具计算塔上的总风力。
对于风荷载计算,将结构分解为不同几何形状的 元素,并且可以使用等式计算几何形状上的风荷载。
其中, p =空气的质量密度,Cs =形状系数, U =风速,A =物体面积。
必须获得风速垂直分布U(z)和形状系数的值, 以Eq为单位。(2)。该系数由实验方法确定,其值取决于:
(1)受风影响的框架的横截面形状;
- 雷诺数;
- 车身的粗糙度
(4)屏蔽效果的变化
风的强度通常在时间和空间上。统计的风属性(例 如平均速度和标准一小时量级的速度偏差随海拔的变化而变化。
1小时是指根据公式计算出的海拔高度z(ft)处 的风速U(z)(ft / s)。(3)和(4):
其中,U0(ft / s)是标准风,为1小时表示在参考高度32.8 ft(10 m)处的风速。使用公式计算风荷载。(2)符合IS 875第3- 1987部分的风速。
根据莫里森方程(等式(5)),计算出周期为12的极端波浪引起的水动力载荷,该破碎高度为该 位置水深的0.78倍。该方程将波浪力表示为与粒子加速度成比例的惯性力与与粒子速度的平方成比例的非线性阻力之和。
其中,F =圆上每单位长度的波浪力
圆柱体(N),v,lvl =垂直于圆柱体的水粒子速 度,使用选定的波动理论在圆柱体轴线上计算 (mis),a =垂直于圆柱体的水粒子加速度,使用 选定的波动理论在圆柱体上计算轴(m / s2), p =水密度(kg / m3),水密度(kg / m3),Cv,CM 分别是阻力系数和惯性系数。
莫里森方程中使用的流体速度和加速度是根据艾 里的波动理论计算出来的,该波动理论是使用波动 陡度和相对深度参数从API图中选择的(图8)。
图8不同波动理论的适用范围[14]。
波浪载荷和电流载荷均沿相同方向施加,以实现最大 载荷。以10°的相位增量施加360°的波。由于单桩是轴对称,可以考虑载荷的任何方向以及相应的风效 应,以对单桩产生最大影响。电流力是使用幂定律计算的,如方程式所示。 (6)。
其中,Uc(z)是z高度处的当前速度,z = 0在表面上,Uco是表面当前速度,h是水深,a是指数, 通常为1/7。
图9显示了在特定情况下施加在风力涡轮机上的不 同力。
图9施加在单桩模型上的载荷
SACS中的PSI(桩结构相互作用),分析了一个 或多个静态载荷条件下桩支撑结构的行为。考虑了 桩的有限挠度(“beta;-delta;”效应)和沿桩轴的纵向和 横向方向的非线性土行为。该程序采用分布式弹簧 型柔性基础模型,并采用有限差分技术求解非线性 弹性基础上以梁柱为代表的桩模型。梁柱单元为结构构件建模,以抵抗轴向和弯曲作用。桩上的结构 表示为线性弹性模型。通常,土壤在轴向和横向荷 载下均表现出非线性行为,因此,采用迭代程序来 查找桩对结构挠度的影响[15]。该分析通常基于路 基反应理论。将该桩离散为段,并在段的两端分别 有节点,并且桩周围的土壤被一系列离散的弹簧取代。图10示出了典型的桩土模型。
图10典型的桩土模型[16]。
等式中给出了控制弹性桩的桩-土相互作用的方 程式(基于Bernoulli-Euler梁理论)。(7)和 (8)。
并取代
其中,y是桩的横向挠度,x是沿“ x”方向的桩长, El是桩的抗弯刚度,Px是轴向载荷,p是单位长度 上的横向土反力,K是模量路基反应,即沿桩长分布的荷载。
等式中的微分方程。通过将桩细分为离散元素并以差分形式表示方程,可以求解(7)。有限差分是一种技术,通过该技术,函数的导数可以通过在独立变量的给定值之间的函数值差异来近似变量,例如x0,并且有一个小的增量(x0 h)。 它为将连续体场方程转换为离散数值之间的关系提 供了另一种方法[18]。使用FDM(有限差分法), 将桩离散为长度为h的n个分段(图11)。每个细分 包含用于获得解的假想节点。将梁柱方程应用于每个节 点以解决桩体变形。Reese等人提出,根据k0上的 API图表,根据土壤内部摩擦角的函数获得路基反 应的初始模量(k0)。[19]。边界桩头和桩头采用了一些条件。在桩头采用两个边界 条件中的任意一个,这些条件来自剪力(V),弯 矩(M),斜率(S),旋转刚度(MIS)和挠度
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[235416],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

