英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
基于自适应非线性算法的智能小车的运动控制
摘要
为了提高智能小车的运动性能,本文设计了一个基于自适应非线性算法的智能小车运动控制系统。本系统由硬件系统和软件系统组成。硬件系统由弹性悬架和伺服机构组成,软件系统主要基于伺服驱动器的自适应控制算法,通过软件编程实现机器人的运动控制。为了测试系统运动控制的可靠性和稳定性,笔者分别对系统进行了MATLAB仿真实验和电机转速测试实验。实验结果表明,该系统具有较高的可靠性和稳定性,可广泛用作研发平台。
关键词 智能小车;自适应控制;伺服驱动;MATLAB仿真;速度检测
目 录
3. 材料系统 - 3 -
- 介绍
智能小车控制系统主要分为几个模块,包括控制面板模块、传感器数据采集模块、电源模块、电机驱动模块、上位机模块(2012)。运动控制系统设计是控制系统设计的重要组成部分。智能小车伺服控制器的设计通常是内环电流环、中环速度环、外环位置环。该控制器的特点是硬件控制电流和速度,软件控制位置。当调整参数,循环速度调整第一,然后调整位置环,和当前的控制参数对应的加速度,加速度对应的应力和通常是自动设置。位置控制器通常包含一个简单的比例关系,和速度控制器包含一个比例环节不可或缺的环节。这种传统的位置环嵌入速度环控制方法的缺点是存在与速度成正比的跟踪误差。当我们使用前馈控制方法时,我们可以减少跟踪误差,但代价是超调或延长设置时间。为了克服这些限制并在高精度运动控制应用中优化伺服性能,我们采用了自适应非线性控制算法。这种自适应非线性算法存在于CDHD驱动器中,即HD控制算法。设计了一种基于HD控制算法的运动控制系统。采用高清控制器对电机进行伺服反馈控制,实现汽车按照预定模式自主运动、独立避障、减压等功能。
- 方法
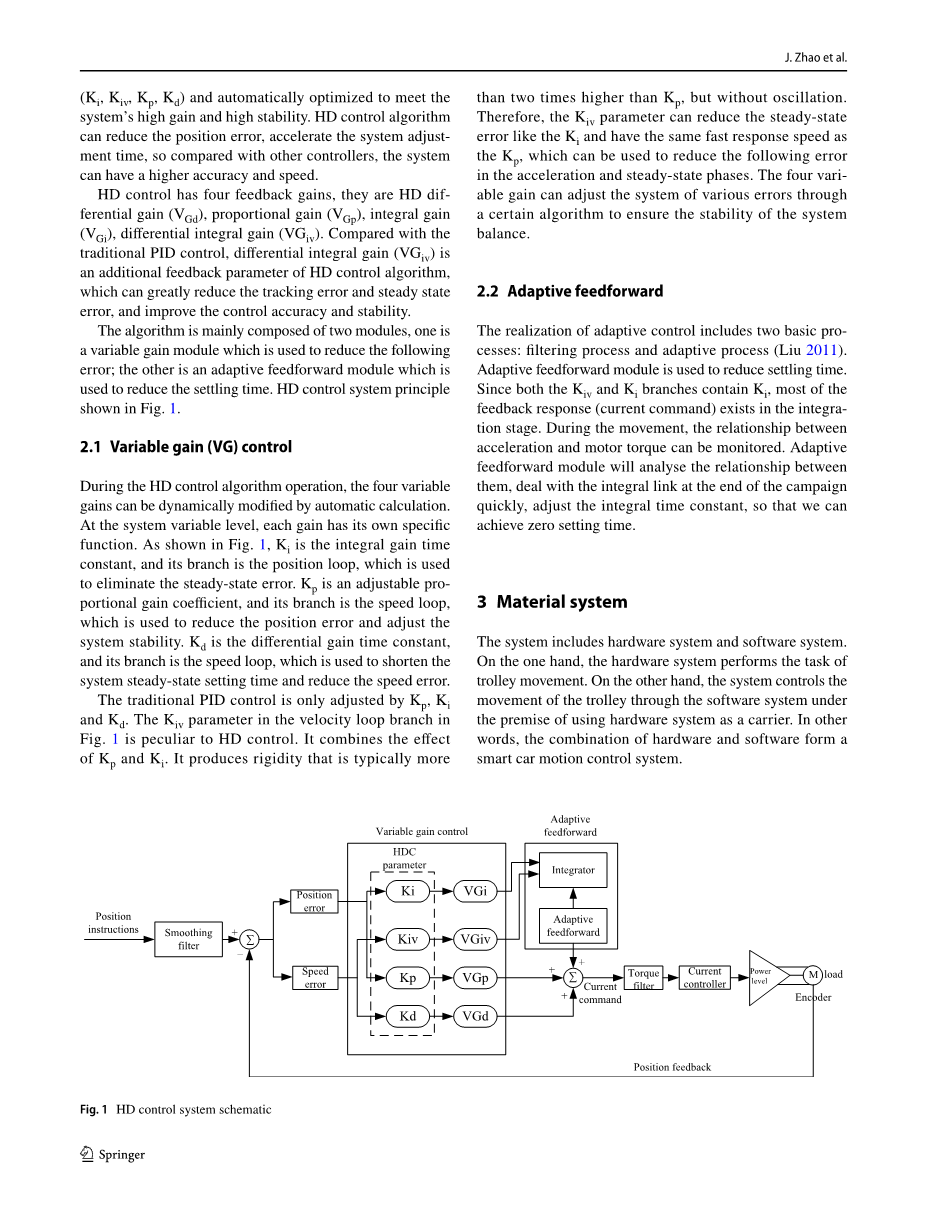
时至今日,传统的PID控制技术在工业领域仍占有不可替代的地位,相关的研究也很多。然而,传统的PID方法越来越不能满足复杂系统的要求。为了克服传统PID算法的不足,我们选择了自适应非线性算法。HD控制算法采用并行控制,所以在一个周期内同一级别的所有分支可以同时执行。每个支路包含一个可变增益参数(Ki, Kiv, Kp, Kd),并自动优化,以满足系统的高增益和高稳定性。HD控制算法可以减少位置误差,加快系统调整时间,因此与其他控制器相比,系统可以有更高的精度和速度。HD控制有四个反馈增益,分别是HD微分增益(VGd)、比例增益(VGp)、积分增益(VGi)、微分积分增益(VGiv)。与传统的PID控制相比,微分积分增益(VGiv)是HD控制算法的一个附加反馈参数,可以大大降低跟踪误差和稳态误差,提高控制精度和稳定性。该算法主要由两个模块组成,一个是用于减少后续误差的变增益模块;另一种是自适应前馈模块,用于缩短系统的稳定时间。HD控制系统原理如图1所示。
图1
2.1可变增益(VG)控制
在HD控制算法运行过程中,四个变量增益可以通过自动计算动态修改。在系统变量级,每个增益都有自己特定的函数。如图1所示,Ki为积分增益时间常数,其分支为位置环,用于消除稳态误差。Kp为可调比例增益系数,其分支为速度环,用于减小位置误差,调节系统稳定性。Kd为微分增益时间常数,其分支为速度环,用于缩短系统稳态整定时间,减小速度误差。传统的PID控制只能通过Kp、Ki和Kd进行调节。图1中速度环支路的Kiv参数是HD控制所特有的。它结合了Kp和Ki的作用。它会产生更多的刚性是Kp的2倍,但是没有振荡。因此,Kiv参数可以像Ki一样减小稳态误差,与Kp具有相同的快速响应速度,可以用来减小加速度和稳态阶段的后续误差。四个可变增益可以通过一定的算法调整系统的各种误差,保证系统平衡的稳定性。
2.2自适应前馈
自适应控制的实现包括两个基本过程:滤波过程和自适应过程(Liu 2011)。采用自适应前馈模块,减少了系统的稳定时间。由于Kiv和Ki分支都包含Ki,所以大多数反馈响应(当前命令)都存在于集成阶段。在运动过程中,可以监测加速度与电机转矩之间的关系。自适应前馈模块将分析它们之间的关系,快速处理运动结束时的积分环节,调整积分时间常数,从而实现时间的零点整定。
3 材料系统
该系统包括硬件系统和软件系统。一方面,硬件系统完成了小车移动的任务。另一方面,在以硬件系统为载体的前提下,通过软件系统控制小车的运动。也就是说,硬件和软件的结合形成了一个智能汽车运动控制系统。
3.1硬件系统
机器人正在利用智能制造,因为它在处理更复杂的任务时提供了高度的灵活性和快速适应新情况的能力,而且它可以提供比传统工具机器更低的成本(Wen et al. 2018)。因此,采用智能制造技术对智能小车进行了设计和加工,硬件系统由弹性悬架和伺服机构组成。
3.1.1弹性悬架
弹性悬架机构是车架与车轴或车轮之间所有传力连接装置的总称。它可以传递车轮和车架之间的力和力矩,缓冲不平整路面对车架或车身的冲击,减弱由此产生的振动,使汽车能够平稳行驶(He 2008)。如图2所示,该车采用单纵向独立臂弹性悬架机构,主要由减震器和独立摆动纵向臂组成。减震器采用液压顶推原理,内部通过油压产生压力,推动阀门,在车轮遇到颠簸路面时吸收振动能量,起到减缓振动,保持车辆平稳行驶的作用。此外,我们使用了四个独立的摆动单纵臂机构。一方面,单纵向臂悬架的优点是占用较少的横向和纵向空间,且轨迹不随车轮的跳动而改变;另一方面,独立悬架的左右车轮分别跳动,互不相关,从而可以减少车身的倾斜和振动(Luo 2005)。该车主要用于户外物品处理和社区巡检等工作场所。我们需要考虑各种环境的影响,
如陡坡、低洼坑等崎岖复杂的路况。此外,弹性悬架机构结构简单,设计制造成本低,易于推广应用。因此,车辆的运动系统执行机构采用弹性悬架机构,在满足实际性能的前提下可以节约制造成本,是经济性和实用性双重标准下的最佳选择。
图2
3.1.2伺服系统
如图3所示,该车动力单元采用以色列进口交流永磁同步伺服电机驱动。整个动力装置包括一个CDHD伺服驱动器,一个PRHD2伺服电机,和一个直角齿轮箱。CDHD驱动器是一种典型的伺服驱动器,它嵌入了电源板和控制面板两个功能部件。电源板一端与电源连接,电源板一端与电机连接,为电机供电。该方法的优点是同时给驱动和电机供电,消除了单独给电机供电的麻烦。控制面板主要负责电机的驱动控制。通过增量编码器与电机控制接收器连接。驱动器接收来自主机的程序指令,然后通过自适应非线性算法对电机进行负反馈闭环控制。该驱动器采用了新的电流环路设计,提供了非常快的频率响应,它几乎可以消除跟踪误差,其自动协商功能,并减少了时间几乎为零。由于工作场所多、工作场景复杂,必须满足汽车运行平稳、噪音低、响应快、使用寿命长、输出扭矩大的要求。与步进电机驱动相比,伺服电机驱动是一种能够对位置进行实时反馈的闭环控制系统,具有速度快、性能优越、精度高、过载能力强等优点。因此,我们选择伺服驱动系统作为小车的运动系统,基本上可以满足小车运动的要求。
图3
3.2软件系统
该车辆的运动控制控制器为Arduino MEGA2560控制板。MEGA2560处理器采用AVR微控制器,有自己独特的编程环境。它可以用传统的C语言进行编程,这样用户就可以很容易地使用它。同时还可与各种红外距离传感器、超声波传感器等多种外设硬件兼容。在车辆上安装红外距离传感器时,可以对车辆和障碍物进行相对实时的定位,使车辆避开障碍物,行驶平稳。此外,人们可以通过软件调试传感器来实现对智能小车的运动控制,以避免障碍物,并在驾驶员中配合自适应非线性算法来控制电机的运行。智能小车控制系统采用上位机应用程序控制小车的运动,主要有两种运动方式。一种是遥控模式,用户可以通过上位机控制按钮向智能小车发送指令,控制小车的前进、后退、转弯等运动。另一种是自主运动模式,通过分析红外距离传感器返回的数据,主控板可以判断汽车应该直线行驶还是转弯,从而实现在简单环境下避障和自主运动。在自主运动过程中,如果车辆从上位机控制终端接收到转换运动模式的指令,则车辆可以立即转换到远程控制运动模式。运动控制框图如图4所示。
图4
4系统MATLAB仿真
为了检测汽车控制系统的可靠性指标是否满足要求,需要对系统进行仿真。对于非线性控制系统,由于其复杂性,很难进行数学建模。当用户不能使用解析方法设计和分析控制器时,他们通常使用PID (Ziegler和Nichols 1993)。由于HD控制与传统的PID控制相似,建立了控制系统的简单数学模型。采用典型的PID校正方法利用MATLAB软件对系统的静态和动态性能指标进行分析。
4.1系统数学建模
智能小车的运动如图5所示。让我们忽略车轮的转动惯量,假设车辆的摩擦阻力与速度成正比,方向与车辆相反。所以根据牛顿运动定律,系统模型可以表示为:
u是智能小车的驱动力(系统输入)。m是汽车的质量。b是摩擦阻力与速度的比值系数。v是汽车的速度(系统输出)和v是汽车的加速度。系统的参数设置如下:汽车的质量m = 100公斤,比例系数b = 5销售经理和汽车的驱动力u = 50 n为了获得控制系统的传递函数,作者做了拉普拉斯变换公式(1)。由于系统的输出是汽车的速度,作者可以假定初始条件的系数为零,用Y (s)来取代V (s)。所以这个动态系统的拉普拉斯变换:
结合式(2)中的两个方程,得到结论:
车辆运动控制系统模型的传递函数为:
4.2 PID闭环控制系统仿真
根据建立的数学模型,作者进行具体分析的静态和动态性能指标进行系统的初始状态和使用串联校正的原则根据阶跃响应曲线,并考虑参数变化对系统响应的影响。利用典型的PID进行校正,最终希望系统各方面的性能达到令人满意的水平。如下图所示,我们通过数学模型(图6)建立仿真PID控制系统,模拟PID控制器的微分方程为:
在这个公式中,Kp是比例系数。Ti是积分时间常数。Td是微分时间常数。
笔者对式(5)作拉普拉斯变换,得到PID控制器的传递函数:
式中Ki = Kp/Ti为积分系数,Kd = KpTd为微分系数。
进而得到智能小车运动控制系统的PID控制器传递函数:
将参数m = 100, b = 5代入公式,得到:
为了得到理想的阶跃输入响应结果,需要不断调整PID中的三个参数,最后得到结果。Kp = 100 Ki = 600 Kd = 100。PID仿真阶跃输入响应结果所示如下图(图7)。它可以清楚地看到从图的单位阶跃响应上升时间小于3 s和过度小于3%,所以系统的静态和动态指标好。即系统可靠性高,满足设计要求。
图7
5电机转速测试实验
5.1高清控制器调试
如图8所示,在进行实验之前,实验者必须先调试伺服驱动器中
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[422711],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

