
英语原文共 8 页
太阳能赛车设计与应用的能量管理方法
*O.Ustun, *M.耶尔马兹,** C.Gokce,**Karakaya, *,**RN Tuncay
摘要:介绍了设计太阳能电池供电电动汽车的能量管理方法,并讨论了其在伊斯坦布尔技术大学(ITU)赛车上的实施。该方法的有效性已经过测试和测试。在土耳其科学和技术委员会组织的2006年,2007年和2008年的比赛中证明了这一点。该管理模型(EM)在虚拟赛道上消耗虚拟车辆。为此目的,对车辆的电气和机械部件进行建模,并且在车辆计算机模型在测试轨道的三维模型上运行时计算能量值。当获得最大性能场景,即可获得的最大可能速度时,则获得无刷直流电机及其驱动器相应设计。形成数据采集系统和机电量。该信息通过无线通信系统发送到主计算机。主计算机运行能量管理程序并控制比赛是否适合最佳比赛场景。如果检测到模拟和实验之间存在任何差异,则定义并实施新的最佳方案。采用这种灵活的方法,既可以在比赛过程中平放电池,也不会在终点线上保持部分充电,从而实现最大性能。
关键词:太阳能电池电动汽车,无刷直流电机,直接驱动,电动汽车建模与仿真,能量管理算法。
1.介绍
在电动汽车(EV)和混合动力汽车(HEV)上有相当多的作品。其中一些已经商业化并投放市场。另一方面,太阳能电池供电的电动车辆的数量几乎没有,主要是因为电池的高成本。太阳能电池供应车辆的大部分工作仅限于竞赛目的[1-3]。虽然本文也提出了太阳能电池供应赛车的设计方法,但其目的还在于下面提出的设计方法应该是通用的并且也适用于商业设计的车辆。
自2005年以来,土耳其科学和技术研究委员会(TUBITAK)每年都在组织大学间太阳能电池供电的电动车比赛。在2006年,2007年和2008年的比赛中,伊斯坦布尔技术大学(ITU)的车辆在大约40个竞争对手中始终排名第一和第二。本研究介绍了该设计这些车辆的电驱动系统的方法,与普通电动车辆有相似之处。该方法取决于能量管理软件(EMS)的开发。该软件包括车辆的电子,电气,机电,机械和车身部件的建模和仿真。使用该软件,可以计算所有功率量,包括来自太阳和电池的功率,转换为机械功率,损耗以及通过车轮传输到道路的功率。该软件的优势在于使设计人员能够在虚拟赛道上运行虚拟车辆并获得最佳驾驶场景,然后设计最符合场景性能要求的电动驱动系统。能量和太阳能电池功率分别为2000Wh和800W。然而,在2007年,电池功率已降至1000Wh,而太阳能电池表面积被宣布为9米2,相当于大约1200-1500W安装的太阳能。由于功率值更明确,因此将针对2006年的值提供设计方法。伊斯坦布尔技术大学(ITU)的车辆有两个前轮和一个直接驱动的后轮。2006伊兹密尔爱琴海杯和2006伊斯坦布尔TUBITAK杯冠军ARIba如图1所示。国际电联太阳能赛车的机电量值见表I.
图1.国际电联ARIba太阳能赛车
2. 设计方法论
本文介绍了国际电联太阳能汽车电子电气和机电部件的设计策略。该策略取决于考虑约束和参数变化的能量管理模型。主要限制因素包括电池能量(Wh),最大总线电压,安装太阳能,赛道长度,赛道坡度,车辆尺寸和质量(150-300kg之间),车内可用空间用于电气设备等。主要的可变参数是实际的即时太阳能,它是车辆位置,一天中的时间,环境温度和天空条件的函数。另一个可变参数是风的速度和方向。主要目标是设计一个驱动系统,以高能量,高速度和高效率运行车辆[4]。
为了以最小的损耗运行车辆,已经采取了两个初步的基本设计决策。直流母线电压应尽可能高,电机应直接连接到车轮。第一种方法减少了所谓的铜损,减小了电气元件的尺寸,第二种方法消除了机械传动损失。通过最大功率点跟踪器(MPPT)设备将太阳能电池直流母线电压调整到所有国际电联车辆的130-150V范围。对于电动机电源电压,采用两种不同的电压。2006年和2007年的亚军ARIba 2与直流母线具有相同的电机电压。然而,2006年获胜者ARIba和2007-2008获胜者ARIba3的电机电压均为300V,这是直流母线电压的两倍。高电机电压的成功证明了额外的直流到直流转换器的成本和重量,提到良好的空气动力学结构和强大的机械系统对竞赛性能也有很好的影响。
最初,太阳能电池,电池和电力电子电路,直接驱动无刷直流电机及其驱动器的建模与车辆模型一起实现。特别强调电池组[5]的充电状态(SOC)的定义。然后开发赛道半三维模型,并在该虚拟轨道上运行虚拟车辆模型以用于各种比赛场景。通过减去每个瞬间从电池获得的功率太阳能电池总功耗。通过积分功率值,获得更新的能量值。考虑离散可变负载电流的专门开发的电池放电程序用于计算SOC。该方法允许获得每个驱动器场景的最大性能,即使是多云也考虑到条件[6]。当获得最大性能方案(即可用能量的最大可能速度)时,则相应地设计和制造无刷直流电机及其驱动器。在制造和安装过程之后,汽车在道路上行驶,并且测量功率和能量值并且能量管理模型已经过时。
在比赛过程中,使用数据采集系统来测量车辆的电气和机电量,并通过无线通信系统将这些信息发送给主计算机。主计算机运行能量管理程序并选择适合当前天气条件的最佳性能方案。如果使用意外的额外功率或检测到电池瓦特小时的快速减少,能源管理计划会提出方案中的变化。利用这种方法,可以防止在终点线之前使电池变平的风险。
3.车辆的建模和仿真
车辆模型有以下四个主要组成部分:
A. 车身和机械载荷的建模
B. 太阳能电池,电池和SOC的建模
C. 驱动和传动系统的建模
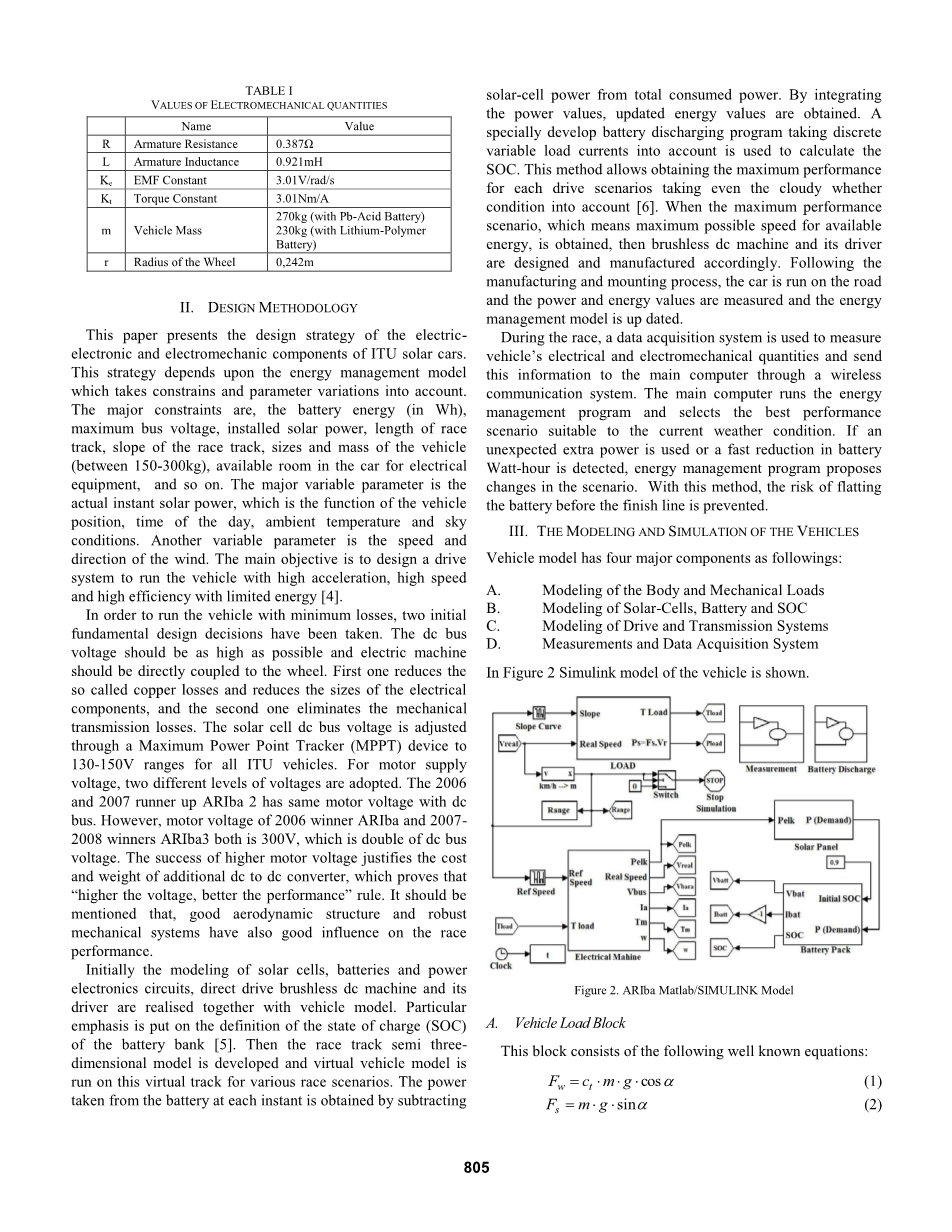
D. 测量和数据采集系统。在图2中,示出了车辆的Simulink模型。
图2. ARIba Matlab / SIMULINK模型
A.车辆装载块
该块由以下众所周知的公式组成:
其中Fw 车轮摩擦力,Fs 斜率(可能是正或负),Fa 空气阻力,F交流电 加速力,ct 轮胎摩擦系数,m质量, g自由落体重力,坡度,cr 空气摩擦系数,空气密度,垂直于运动的Af 前部区域,v是速度。对于这种直接驱动系统,电机和车轮之间没有机械传动系统,因此电机扭矩等于总驱动扭矩[7]。总需求力F合计,驱动功率P莫特 和驱动扭矩Tm 计算如下:
B.太阳能电池,电池和充电状态的建模
由于最初已知安装的太阳能电池电池或电池区域,并且MPPT电路将功率电平保持在最佳点,因此将太阳能电源建模为电源就足够了[8]。太阳能电池总线和电动机功率放大器之间有DC / DC转换器。因此,除了电机的功率放大器之外,输送到电动机和车轮的功率也由DC / DC转换器控制。在仿真模型中,将每个速度下的车辆的扭矩需求作为输入,并相应地计算电流和电压。在驾驶时,如果足够的话,用于驱动汽车的电力主要由太阳能电池供电。如果需要高功率,则电池提供额外的电力。如果电动机的电力需求低于太阳能电池的电力输入,则电池处于充电模式。如果车辆处于下坡操作中,电机作为发电机运行,则电池再次处于充电模式。电池被建模为电压源和电阻。铅酸或锂离子电池的电压变化可从制造商数据表中获得,并作为模型中的查找表。由于负载和电源是可变的,充电和放电电流也是可变的。这项研究中最棘手的部分之一是通过采用非常短的间隔过度放电电流来计算电池的SOC [9]。为此,提出了一种新的离散电荷降低方法,其中定义了离散放电电流,并开发了一种算法,以在每个间隔获得电池中的减少的电荷。电荷减少和完全充电的订购的集成产生电池的SOC。
C.车辆驱动系统的建模
车辆驱动系统由车轮耦合电机及其电源和控制电子设备组成。电机是无刷直流电机。BLDC系统的数学模型包括四个变量:三个电流和电机速度。传导间隔为120。当完成适当的开关对的导时,下一个如表II [44]所示,进入下一阶段的即时步骤。例如,与位置lt;=gt; @
的等效电路有关的导通(a)和换向(b)时刻如图3所示。与该转子位置的换向和导通瞬间有关的方程式范围遵循[10,11]。
图3.与转子位置 X 范围内的等效电路有关的传导(A)和换向(B)瞬间
换向期间的状态方程:
传导过程中的状态方程:
这里,i是相电流,R是相电阻,L是自感,M是互感,Vd 是施加的相电压,E是反电动势,Tm 是输出扭矩,是角速度,J是惯性矩,B是粘性摩擦常数,Ty 是负载扭矩。
参考信号代表目标速度。该信号与实际速度进行比较,产生误差信号,用于调节DC / DC转换器的输出电压。然后,通过考虑车辆动力学来计算电动机的车轮参考扭矩。
D.电池放电块
众所周知,每种电池类型都具有特殊的非线性放电特性。最初,通过使用目录值和曲线拟合技术,为锂聚合物和铅酸电池开发寿命与电流曲线,如图4所示。
图4.适合的电池放电曲线
之后,分段线性化技术用于获得百分比充电状态(SOC)值。在比赛期间,车辆以90%的SOC开始,每个瞬时电流和电流持续时间用于计算电荷的增量减少。这些增量减少的时间积分产生了电池的更新SOC。稍后通过实验结果验证该模拟技术。设定在比赛结束时,电池的SOC应为10%[12]。
4.道路模型的发展和车辆性能的计算
为了使用第3节中开发的车辆模型计算车辆在赛道上的性能,有必要开发道路模型然后运行虚拟这条虚拟赛道上的车辆。这项研究的目标是计算各种驾驶场景的车辆能量。消耗的总能量不应高于可用能量。因为可用的能量局限于电池和太阳能。而后者是电池的功能天气条件,驾驶场景应该灵活[13]。
图5. Formula G Istanbul Park赛道的计划
为了得到伊斯坦布尔公园赛道的计算机模型,使用了图5所示的拓扑图,并开发了一个和平的线性化模型。使用此型号,可以考虑上坡,下坡和滑行操作。模型车辆在模型赛道上运行,并且车辆的加速度和速度增加以实现最快的性能而不完全放电。然后,为半阴天和全阴天天气设置其他最佳性能方案。最后定义了制动和加速点,并开发了速度参考表。该块的输入是以米为单位的赛道位置,输出是该特定位置处车辆的期望速度。该块用于电机和机械传动块,如图6所示。
图6.电机和机械传动块
车辆和道路模型用于获得下面描述的最佳驾驶场景。
5.驱动场景和能源管理软件
如前所述,2006年的电池能量限制为2000Wh,太阳能电池板的最大安装功率为800W。据观察,实际可用的太阳能几乎不超过500W。赛道长度为2200m * 30转。= 66公里,预计比赛将持续90分钟,因此可用太阳能将为750Wh。最后,在晴朗的天空下,车辆可以使用总共2750Wh的最快驾驶场景。
开发了一个“能源管理软件”,以获得最佳的驾驶场景。,取决于虚拟车辆在虚拟测试跑道上运行时的计算能量平衡原则。能量平衡意味着太阳能电池功率 电池功率=驱动功率 损耗。通常驱动功率很高,因此一些电源由电池供电,电池放电软件用于计算SOC的减少[14,15]。另一方面,当车辆处于自由行驶或下坡行驶时,电机的电力需求非常低或甚至是负的(产生)在这种情况下太阳能供电电池。在伊斯坦布尔公园赛道上有明显的曲线,预计车速应下降两次至20公里/小时,一次至40公里/小时和两次至60公里/小时。初始模拟结果产生的连续速度高于70 km / h,可用能量不足。在图7中,显示了车辆的参考速度与位置曲线。由于车辆在静止位置开始比赛,因此第一腿能量略高于其他腿。在图8中,可以看到第一和第二支腿的车辆的速度 - 时间曲线。在图9中,可以看到电动机电流与时间的关系曲线。电池电流是通过从电动机的功率中减去恒定的太阳能功率来计算的,如图10所示。为了计算30条腿所消耗的总能量,计算前两条腿的累积能量曲线,如图11所示。前2圈,消耗177Wh。在上述情况下,获得15倍的能量将大致产生车辆的总能量。消耗的总能量计算为2655Wh,几乎完美,略低于可用的2750Wh能量。
最后,测试各种驱动方案并建立最佳驱动方案,使得在比赛结束时电池能量仅能持续一个腿。应该提到的是,在这种情况下不使用再生制动。车辆在73分钟内完成比赛。
图7.位置与参考速度曲线
图8.第一和第二腿的车速变化时间
图9.第一和第二支路的电机电流随时间的变化
图10.第一和第二腿的电池电流随时间的变化
图11.第一腿和第二腿的消耗能量随时间的变化
6.BLDC机器及其电子驱动器的设计
因为车辆在各种情况下的最佳驾驶性能已经被定义,现在有必要设计一台电机及其电子控制单元,使车辆高于这些场景的要求。作为一种驱动机器,无刷直流电机的选择考虑了其低功率重量比,高效率和易于控制。最大速度和加速度值是特别重要的约束,其是相互矛盾的性能值,因为扭矩与扭矩常数成比例并且速度与其成反比。如上所述,电动机直接连接到车轮,因此电动机和车轮扭矩和速度相等。最初选择最大速度为90 km / h,额定扭矩为41 Nm。设计的BLDC电机如图12所示,电机设计值如表III所示。测量相电流和电压波形,测量转矩 - 速度曲线,计算使用有限元分析的扭
资料编号:[5138]

