英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
- 美国
- 专利申请公开 (10)出版编号:美国2013/0213919 A1
Kyllingstad (43)出版时间:2013年8月22日
- 降低起重机动态载荷的方法
(75)发明者:Age Kyllingstad, Algard (NO)
(73)申请人:NATIONAL OILWELL VARCO
NORWAY AS, Stavanger (NO)
(21)申请号:13/636,964
(22)PCT领域:2011年3月17日
(86)PCT.NO.:PCT/NO11/00087
sect; 371 (c)(1)
(2)(4)时间:2012年10月29日
(30)外国申请优先级数据
2010年3月24日 (NO) .................................. .. 20100435
出版分类
(51)Int. Cl.
B66C 13/06 (2006.01)
(52)US. Cl.
CPC ................................... B66C 13/06 (2013.01)
USPC ........................................................ .. 212/272
- 抽象
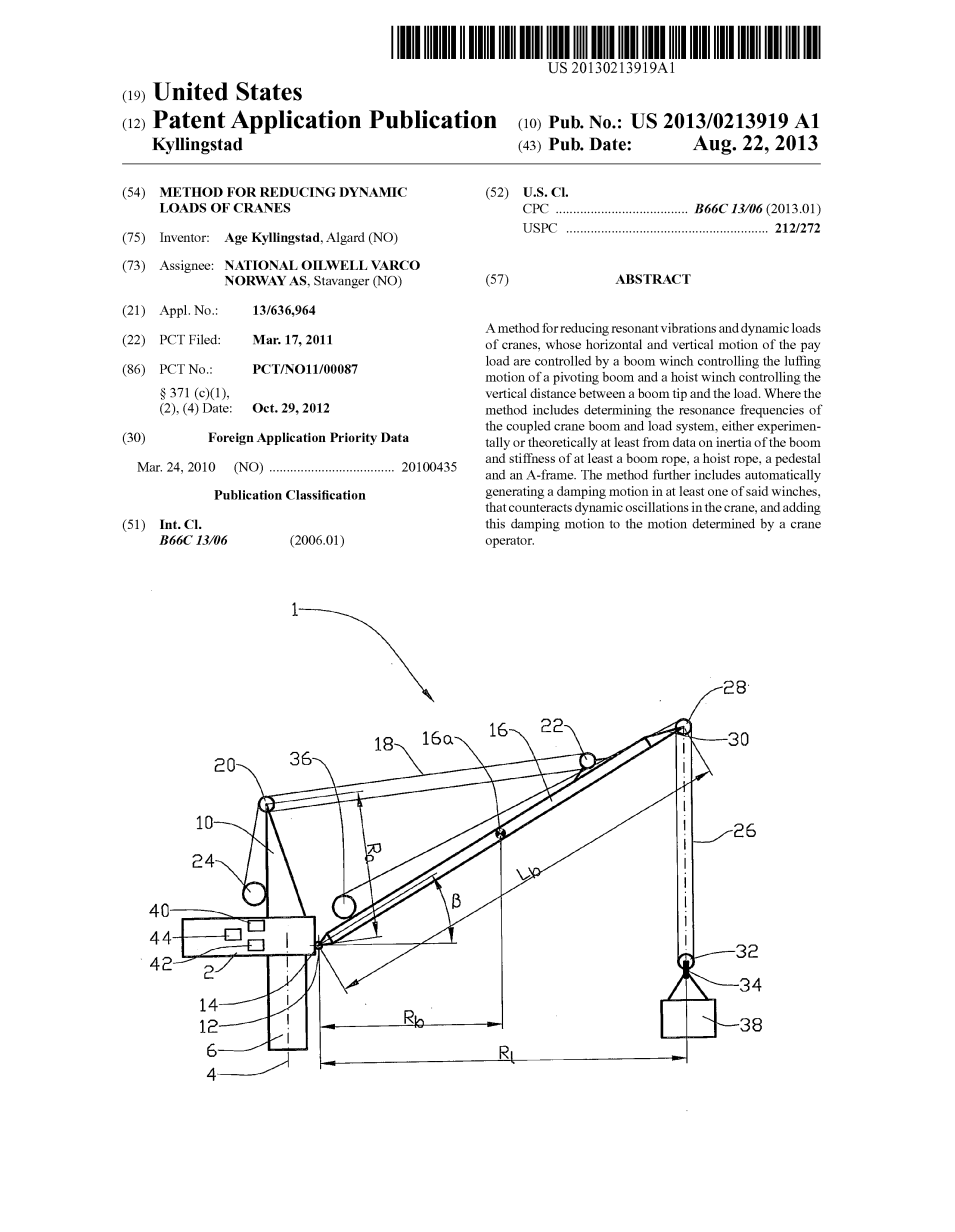
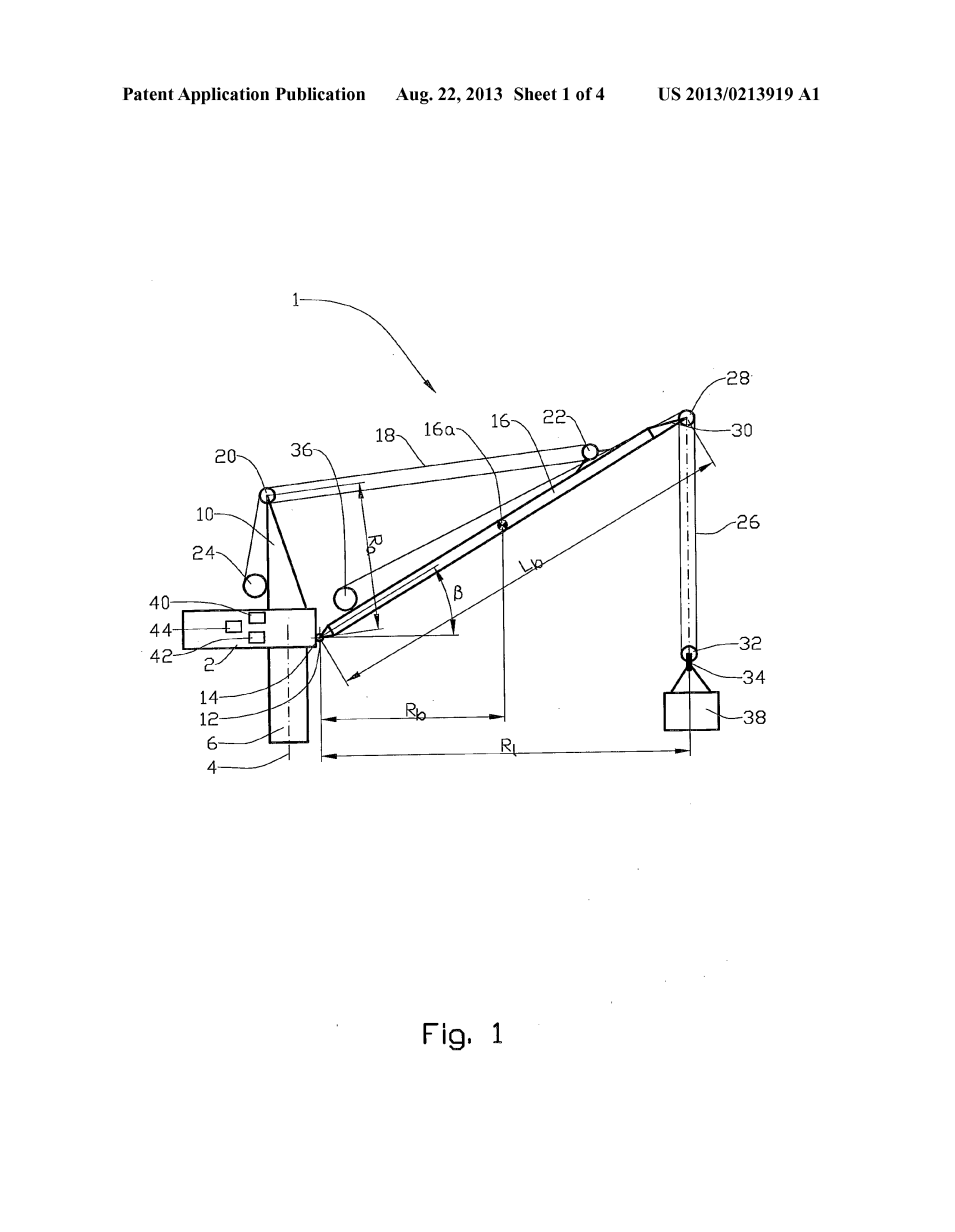
一种用于减少共振和起重机的动态载荷的方法,其有效的水平和垂直运动由悬臂绞车控制,升降绞车控制旋臂和起升绞车的变幅运动,升降绞车控制悬臂尖端和负载之间的垂直距离。其中该方法包括:确定耦合吊车悬臂和负载系统的谐振频率,通过实验和理论至少悬臂的惯性数据和至少一个悬臂绳,升降绳,一台座和A型架的刚性。该方法还包括:自动在所述绞车中产生至少一个阻尼运动,抵消起重机动态振荡,并加入这种阻尼运动到起重机操作员决定的运动。
专利申请公开 2013年8月22日 表1 美国2013/0213919 A1
图1
专利申请公开 2013年8月22日 表2 美国2013/0213919 A1
专利申请公开 2013年8月22日 表3 美国2013/0213919 A1
专利申请公开 2013年8月22日 表4 美国2013/0213919 A1
减少起重机的动态载荷的方法
交叉引用相关的应用程序
(001)这个应用程序是2011年3月17日的PCT / NO2011/000087领域的35南加州大学sect;371国家舞台的应用程序,号称挪威应用程序没有的好处。与2010年3月24日的20100435领域,为了所有目的,两者都结合起来被引用。
关于联邦政府赞助的研究发展的声明
(002)不可应用的。
背景
(003)1.发明领域
(004)本发明涉及一般方法减少起重机的动态加载。更确切地说,本发明涉及一种方法减少共振振动和动态载荷的起重机,其有效的水平和垂直运动负荷是由悬臂绞车控制旋转吊臂和起重机的变幅运动绞车控制悬臂尖端和有效负载之间的垂直距离负载。
(005)2.技术背景
(006)海上起重机经常用于海上提升,其负载从一个浮动的供给船拾起。这样的提升通常代表着给起重机施加比类似的平台或平台起重机从相同结构的起重机基础提升负载更高的动态载荷。
(007)海上提升的潜在高动态负载与船和起重机之间的垂直速度的差异密切相关。如果负载升空船甲板船向下运动,那么急拉能使起重机的峰值负载超过了允许的最大值。
(008)一个熟练的吊车司机通常可以通过选择负载容器在最佳胀阶段降低高峰负荷,也就是,当船与吊臂尖端之间的垂直速度差异很低时。然而,由于船舶升沉是一个随机过程导致非周期和不可预测的升沉运动以及人类会犯错误,因此起重机依然存在超载的风险。
(009)负载图是选择于低风险到可以接受的程度,它定义了最大允许起重机载荷在不同吊臂半径和钻井平台升沉条件。天气操作窗口的限制意味着高成本成为了更多的等待天气结果。
(010)这项发明的目的就是为了解决或减少至少一项现有技术劣势。
本公开的简要概述
(011)目的是通过发明实现的,这项发明经过了下面描述中披露的特点以及接下来的专利索赔。
(012)这里提供了一个减少起重机共振振动和动态载荷的方法,它的有效负载的水平和垂直运动由控制绕轴旋转的吊臂的俯仰运动的吊臂和控制吊臂尖端和负载间垂直距离的起吊装置控制,在这个方法里包括了这些步骤:
(013)实验或理论上从吊臂的刚度和惯性数据以及至少一根吊臂绳,一根起升绳,一座机架,一个A型架的刚度数据确定耦合起重机臂和加载系统的共振频率;
(014)至少一个上述的在起重机上抵消动态振动的绞车的自动生成的阻尼运动;以及
(015)把这个阻尼运动加在由起重机操作员决定的运动中。
(016)阻尼诱导绞车运动通过基于标准变幅钢丝绳和起升绳的张力的高通或带通滤波值的反馈获得。
(017)阻尼诱导绞车运动可以通过调优的标准PI-type绞车速度控制器,在顶部绞车速度控制器调至接近最低起重机共振频率,以最有效地吸收振动能量,起升绞车速度控制器调至接近最高起重机共振频率,以最有效地吸收振动能量。
(018)吊臂绞车速度控制器的积分因子的选择实质上等效于产品有效的惯性的产品和方角吊臂的共振频率,起升绞车速度控制器的积分因子的选择实质上等效于产品有效的惯性的产品和方角吊臂的共振频率,速度控制器的比例系数选择有反共振频率的平方的线性组合给所需的衰变率两种共振模式。
(019)吊臂绞车速度控制器的比例系数可以选择起重机基座和吊臂绳有效刚度的平方的正比,吊臂的惯性的反比,吊臂共振频率的四次方;提升绞车速度控制器的比例系数选择起重钢丝绳和负载惯性有效刚度的平方的成正,负载惯性的反比,角负载谐振频率平方,给所需的衰变率两种共振模式。
(020)吸收带的宽度可能增加,至少有一个绞车的有效惯性通过在速度控制器添加一个新的惯性补偿项降低,新补偿项是测量速度和惯性机械绞车的一小部分的时间导数的乘积。下面,一些基本的起重机动力学解释参考项目和间距由附录图1所示。图1显示了一个典型的海上起重机的简化和示意图。基本起重机动力学有关的例子包括在具体描述的一部分,就是相关的理论的体现。
(021)吊臂的变化角度,通常被称为俯仰式运动,由绞车控制,以下称为吊臂绞车。吊臂绞车通常是放在一个回转平台,在吊臂绳的帮助下控制A型架顶端和吊臂连接点之间的距离,这也被称为吊臂拉绳,通常有多根的绳,通常4 - 8。
(022)提升绞车通过起升钢丝绳直接控制的垂直位置。提升绞车通常放在吊臂上靠近连接回转平台和吊臂的铰链。后者可能,垂直或接近垂直轴的回转马达。回转平台是连接到起重机基座,是起重机的基础,是海上钻井平台或平台结构的起重机的一部分。
(023)与简化的例子相比大多数海上起重机有两套钩和起重绞车。主提升机是专为特重货物设计,有多根起升绳。相比之下,动臂起重机通常有一根起升绳,降低拉升能力但有更高的提升速度能力。动臂起重机通常有比主提升机更高的负载半径,因为它提示轮在被称为“鞭子”的吊臂扩展尖端附近。尽管在下面对主吊车的例子和分析,这个方法对鞭子起重机同样适用。
(024)起重机不完全是刚性结构,吊臂和负载的运动仅仅由相应的绞车决定。相反,起重机的弹性元素,尤其是绞车和吊臂绳索使起重机成为了有与几个动态自然振荡模式的动态结构。这些模式将如以下简要解释改变吊臂角度和有效负载的自然频率的函数。
(025)方法根据涉及修改的速度控制,使绞车速度响应负载的变化的发明而来。
(026)为了方便和限制的数学复杂性,起重机的动力学研究进行以下简化的假设:
(027)起重机没有回转运动;
(028)忽略负载的钟摆运动;
(029)忽略吊臂铰链的平移运动
(030)吊臂完全稳定;
(031) 忽略基座和三角架的惯性;
(032)动态运动相对小;
(033)绳的张力始终为正;
(034)负载与船不接触。
(035)一分之三假设暗示起重机被当作一个两自由度系统:角吊臂运动(绕固定铰点旋转)和负载的垂直运动。最后这两个假设暗示问题可以以惯性和常数刚度的工作条件线性化。这些限制可能会考虑在计算,但经验表明,即使有这样的限制根据发明的方法也足够很好地运行。
(036)在这样的假设条件下,吊臂的角运动方程式为:
(1)
其中
(037)是吊臂惯性力矩(参考铰点位置),
(038)是角吊臂加速度,
(039)是吊臂角度(由吊臂尖端铰点定义),
(040)是负载半径(铰点到负载的水平距离),
(041)是顶绳的力矩半径(到铰点的距离),
(042)是顶绳张力(作用在A型架滑轮上),
(043)是起升绳的张力(作用在吊臂尖端滑轮上),
(044)是吊臂质量,
(045)是重力加速度,
(046)是吊臂重力半径(铰点到重心的水平距离)。
(047)半径,,慢慢改变吊臂角的功能,在这次分析里视作常量。前者是简单的,其中是吊臂长度,也就是绞点到吊臂尖端滑轮的距离。另外两个半径明确的表达式对熟悉的人是知道的,这里就省略了。
(048)把角运动方程转化为相应的垂直运动方程很简便。这可以由上述方程除以负载半径和引入以下变量:
(049)吊臂尖端惯性质量
(050)吊臂尖端水平速度(正上方)
(051)吊臂尖端水平受力
(052)吊臂尖端重量(重力)
(053)吊臂的运动方程式可以写为:
(2)
(054)负载的相应的垂直运动方程式为:
(3)
其中
(055)是负载质量,
(056)是负载垂直速度(正上方),
(057)是负载重量。
(058)起升绳拉力是提升绳弹性伸缩的函数。可以表达为:
(4)
其中,是起升绳的有效刚度,是绞车基础部分的负载速度。刚度可以明确表达为:
(5)
其中
(059)是起重钢丝绳的数量,
(060)是缠绕在绞车上钢丝绳总长度(承受张力的),
(061)是绳的有效弹性系数,
(062)是绳的截面面积。
(063)类似的,吊臂尖端有效垂直力可以表达为:
(6)
其中,是起重钢丝绳有效吊臂尖端刚度,是绞车基础部分最高速度。刚度是一个函数,不仅仅是顶部绳的强度,也是基座和A型架的弹性绕度。可以表达为:
(7)
其中,
(064)是顶部绳的数量,
(065)是从顶部绞车到顶部绞点的绳的长度,
(066)是基座和A型架的角刚度。
(067)简单的说,这是假设顶部
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[147462],资料为PDF文档或Word文档,PDF文档可免费转换为Word

