
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
自动化仓库的死锁检测和避免策略
摘要:本文重点研究了自动存储和检索系统(AS / RS)的实时控制,这个研究的目的是负责资源分配和决策选择。在这些系统中死锁情况可能会发生当系统中的一部分在循环等待情况下需要一组资源时。我们模拟一个通用的多产品AS / RS的有轨车辆作为离散事件服务系统。接下来,我们比较了两个不同的实时死锁解决策略:避免死锁作者提出的战略和一个死锁检测/恢复策略,在相关文献有所提及。这两种控制策略通过一个模拟的案例研究进行比较。
关键词:自动存储和检索系统,实时控制,死锁检测,死锁避免,离散事件仿真。
1介绍:
自动化存储和检索系统(AS / RS的)被广泛地用于仓库物料搬运。一个典型的AS / RS包括几个过道与两侧的存储货架,每个货架由一个自动化堆垛机服务来操作存储设备和货物的检索。起重机可以在三个方向移动:沿轨道走行,侧身过道和货架之间移动,垂直到达存储/检索(S / R)的位置。每个过道也有可以运输货物的输送带。此外,AS / RS还包括轨道导向车辆(RGVs),运送车[5]。最后,还包括一些输入(存储)和输出(检索)缓冲站,在那里RGVs装载或卸下托盘。自动化立体仓库的好处包括劳动力成本低,低库存成本,提高空间利用率,提高物料跟踪和系统吞吐量。然而,一个AS / RS的存储出入库效率在很大程度上取决于所采用的控制政策的效率。
本文重点介绍由RGV服务的自动化立体仓库的实时控制。这个相关文献通常涉及经典的操作问题,如分析存储和检索测序策略[ 6,7 ]。然而,却很少有解决资源分配问题的,如冲突和死锁问题。死锁是一个循环等待情况[ 3 ],那里有一组工作等待永远不会被释放的资源。因此,死锁发生可以使一个系统的运转终止还会严重影响系统的性能。在本文中,我们对自动化仓库的两种控制策略进行了比较。第一个控制策略,之前的一个作者提出的,能够保证效率的一种灵活的避免死锁的策略。此外,我们在相关文献[ 5 ]中提出的策略采用了死锁恢复,即利用缓冲区来存储不能完成的工作来检测死锁的发生和恢复系统的行为。离散事件模拟的案例研究表明,检测并即使消除死锁的运行策略效率更好。
2系统介绍及案例研究
2.1系统描述
我们认为大规模的AS / RS(见图1)包括双向(S / R)输送机,贮存输送机,检索输送机,堆垛机,有轨引导车系统(RGVS),储存站和检索台[6]。我们称之为J ={JK:k= 1,...,NJ}的集合中的所有的子集是存储在系统中或在系统中检索,V={VH:H= 1,...,NV}和G={GI中:i =1,...,NG} 集合中RGVs和堆垛机的集分别在系统中可用。在续集我们表示RGVs和起重机为系统的车辆。集合U =Jcup;Vcup;G表示系统的用户需要的资源。该RGVS轨道被划分成不相交的区域,每个区域代表一个靠近存储或检索输送机的位置,在其输入或输出站,或到RGVS轨道的一部分(见图1)。每个区域是RGV车辆能够获得资源并且可以如下表示i = 1,...,NZ,其中NZ是在RGVS区域中的数目。此外,我们一般也可以把资源的存储和检索站称作单向和双向输送机。接下来我们定义i = NZ 1,...,NZ NR等材料处理资源,即NR的数量。此外,所有过道的位置,其中每个起重机可移动,对应堆垛机可以利用。i = NZ NR 1,...,NZ NR NA,其中NA是起重机的总数目,包括垂直,水平位置和侧向移位,以及归属位置(即过道的位置,其中起重机位于空闲时)。最后,让NL即存储位置的总数在过道上的侧面货架可用。对于i = NZ NR NA 1,...,NZ NR NA NL这些这部分可以获取和使用R0一个虚构的资源系统。因此,R = {りI = 0,...,NZ NR NA NL}表示系统资源集。由于每个RGVS区,过道区,交通资源,或货架位置,只能容纳一辆卡车,起重机工作,在R={r0}每个资源具有单位容量,同时R0为始终可用,具有无限容量。
2.2案例研究
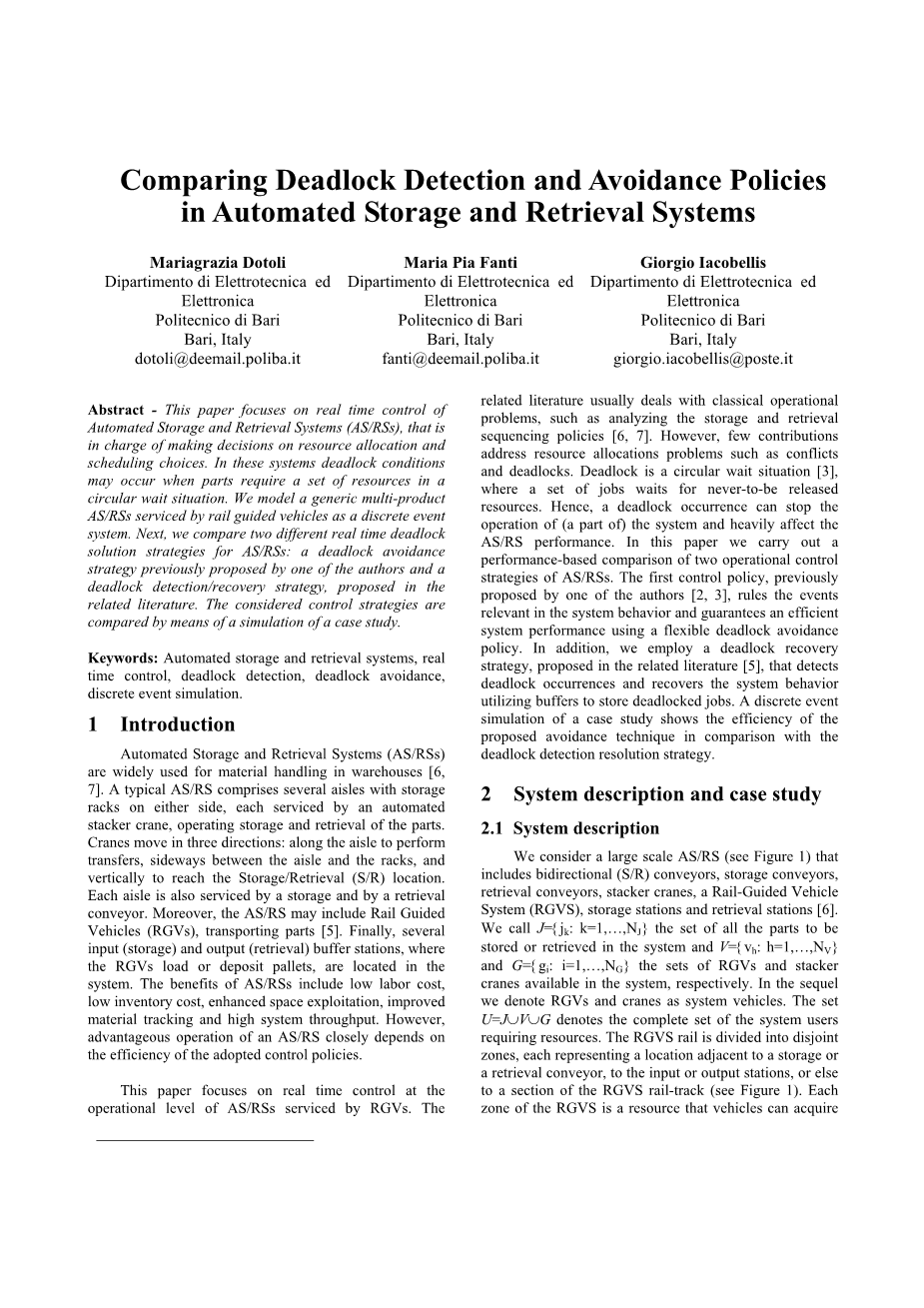
考虑图1中的案例。该图显示原理图是一个多产品的自动化立体仓库有轨车的规划布局。该RVGS逆时针沿轨道运行。该RGVS包括NZ = 23的区域(由R1,...,R23表示)。特别的,NR = 16在RGVS区位于旁边的一个材料处理站,而其余的区域是部分轨道。更精确地说,在AS / RS中包括两个存储(R24和R27)和两个出货(R25和R26)站,五个存储传送带(R30,R32,R34,R36,R38),五个出货输送机(R29,R31,R33,R35,R37)和两个双向输送机(R28和R39),总共NR = 16的材料处理站。此外,NG = 7狭窄的过道也位于系统中。每个通道包括35个轨道位置,沿其相应的起重机行进,从其起始位置开始(R40,...,R46)。过道包括每两个货架在分区有665个位置19个单位,共计14架,NL = 9310的位置。此外,每个起重机可侧身和垂直方向移动服务于货架,共1365的位置每7个巷道。因此,NA = 9555起重机位置在AS / RS单独显现。最后,虚拟资源r0表示系统输出。我们注意到在图1中仅某些简单的位置显示而大多数货架和过道位置的被忽略。
3系统模型
路径P,即资源的序列,被分配给每个作业站进入系统用于检索或存储操作。一个AS/ RS的描述是货物存取过程和车辆在系统中的运行。特别提出,我们可以建模为一个固定时的离散事件系统[2],在时间t,记Q(T)包含了关于集合J的信息。显然,在RP(j)所述第一资源目前用j举行。此外,如果一个存储任务分配到J部(比如说P(j)条),通过与所述输入站装分配的路线,即,从储存站开始的路径,以下若干RGVS区一个接一个地到传送带和维修走道中所选择的货架的位置。有目标任务的堆垛机选择开始或终止和货架中的目的地位置的指示。
此外,visin;V,加载货物。当v加载货物,该路径rho;(V)= RP(j)上分配给该承载作业的车辆到达目标传送带。因此,该货物是从RGV小车加载到存储输送机,货物再由狭窄过道起重机拾取运送到gisin;G分配的货架位置。在这一点上存储路径P(G)= RP(J)被分配给起重机,在存储完成后堆装起重机返回到相应窄巷道位置(单周期起重机操作)。
同样地,如果货物j是要被检索,路径p(j)是分配给它适当的窄巷道起重机gisin;G由监督员激活并行进到相应货架位置。同时地,一个RGVvisin;V被分配到路径P(v),以便它可以达到相应位置装载作业。 然后,起重机,沿着路径p(G)= RP(j)加载货物并携带到出货输送机。加载货物后,RGV开始相同的路径作业,即,p(V)= RP(j),运送货物从窄巷道提货输送机到货物输出站。
因此,系统Q收集用户设定的U的相关数据,操作和进行每个作业相关的(存储或检索)的任务,卡车和起重机装载着货物,沿着一个预订的车辆的路径。
图1-有3辆RGV的自动化立体仓库模型
3.1系统事件
以下四种事件是系统中可能会发生的:
事件类型一:一个货物j进入系统的出货货入货站台。这个事件是由sigma;1=(j,p(j))确定的,其中p(j)是入货或出货站台,他被指定到货物j;
事件类型二:小车v或起重机g或者货物j从一个地方要到另一个地方,这次活动是由sigma;2=(A,B)确定,其中aisin;Vcup;Gcup;{empty;}和bisin;Jqcup;{empty;}。符号aisin;Vcup;G表示携带货物的jisin;Jq和它的车辆a=empty;,在有货物没被装载时。此外,该符号bisin;Jq表示所携带货物的车辆aisin;Vcup;G。b=empty;意味着有车辆空闲或被预订。
事件类型三:一件货物j预定一个起重机g或搬运小车v进行存储或检索作业。这次活动是通过sigma;3=(G,J,P(G))或sigma;3=(V,J,P(V))来标识的,其中p(g)和P(V)是分别分配给起重机g或车辆V的路径,目的是到达到货物j的位置;
事件类型四:一件货物离开系统或者存储在货架中。该事件是由sigma;4=(J,RM),rmisin;{R0,RI = NZ NR NL 1,...,NZ NR NA NL}标识,代表着货物j终止操作。
4对死锁情况的预测
死锁是一个循环等待状况[3],其中一组作业等待从未将要释放的资源。这种死锁情况的解决方法是由其中一个作者提出来的,该方法适用于自动生产系统以及自动导引小车。
一个关键点来分析死锁是适当描述用户和资源之间的相互作用。为了这个目标,直接图(集合)DR(Q)=[N,ER(Q)] ,也被称为剩余路径集合,综合代表了可能的资源分配情况,也考虑到了系统中在作业的剩余业务和预订车辆的剩余路径。 尤其是在集合N代表的资源集的系统。因此,相同符号表示作业点和系统资源,即,N= R。而且,边缘ER(q)包括EIM,当且仅当(IFF)RM立即跟随RI出现在一些残留路径RP(j)带里,例如RP(ⅴ),RP(G)jisin;Jq,visin;V和gisin;G。
包含在Q中特有的信息可以由第二集合DT(Q)=[N,ET(Q)]的方式展出,命名为过渡集合。虽然顶点仍然设置为与资源集合重合,ET(Q)是包含在ER(Q)中的。因此,DT(q)是DR(Q)的一个子向图。特别的,ER(q)的边缘EIM是在ET(Q)当且仅当Q工作,jisin;Jq或Vcup;G的预订车辆持有ri和需要rm作为下一个资源的情况下产生的。由于车辆运载货物是按照分配给该承载部分的路径进行的,这些车辆被作为集合的依据考虑到货物正在运载中。如[3]中,在一个有一定资源承载能力的系统中,死锁的出现条件与集合的过度循环有关,就像下面的命题说明的那样。
命题一:q是系统的一个死锁当且仅当DT(q)中存在至少一个循环。
我们注意到3型和4型事件总是启用,因为他们不能确定死锁或碰撞。因此,为避免死锁的控制方法可以抑制或有利于某些1型或2型事件的发生,这取决于当前的Q。从命题1,一个简单的死锁开始,一个简单的避免策略可以被确定,向前预测一步。特别是,当一个1型或2型事件促使系统从Q变为Q时,该策略建立新的过渡集合DT(Q)并抑制该事件的发生当且仅当这样的集合包含一个循环。如[3]中所示,该控制算法可能会导致系统受限的死锁状态。这样的情况在仅当DR(Q)的循环享有特殊属性时能够发生,可以使用集合展出,D2R(Q)= [N 2(q),E2R(Q)],名为残余第二级从DR(Q)集合获得。由{gamma;1表示,
gamma;2,...,gamma;M}全部DR(Q)的循环,我们把gamma;kisin;N2(Q)到DR(q)的每个循环gamma;k关联。此外,e2kh处于E2R(Q)中,当且仅当以下两个条件成立:一)gamma;H和gamma;k在只有一个顶点; 二)存在分配货物的jisin;Jq或Gcup;V的资源需要一个预订车辆路径。
命题二:只有在Gamma;2(q) 不是空集并且nV(q)ge;(C20(q)-1)时,q是一个系统受限的死锁。
5死锁避免策略
对于AS / RS的死锁避免政策(DAP)的定义指定了两个控制功能,资源验证和存储/检索验证。 更确切地说,我们介绍了控制功能网络连接:Sigma;Itimes;Q→{0,1},其中网络连接(sigma;,Q)= 0(FI(sigma;,Q)= 1)意味着,事件sigma;iisin;Sigma;i被抑制的AS / RS系统。
5.1资源验证
资源验证功能允许或抑制2型事件,以避免冲突和死锁。通过Q,AS/ RS系统将从q中选取一个子集作为获取资源的结果,该资源验证控制器由一步先行的测试程序判断Q是否是死锁。下面的函数F1进行验证:
F1(sigma;2,Q)= 1,如果RP的第二区域不为空并且DT(Q)中没有循环。否则,
F1(sigma;2,Q)=0。
5.2存储/检索验证
存储/检索允许或抑制1型事件的,为了避免死锁和限制死锁,要求一个新的路径被分配给一个货物。令p是存储或检索操作,调度货物jisin;J,并且设q是当前系统状态。此外,令q表示系统将会到达的状态当事件sigma;1=(J,P(J))发生时。 下列函数f2定义了存储/检索验证:
F2(sigma;1,Q)= 1,如果DT(Q)中没有循环并且NVQ)lt;(C20(Q)-2),否则
f2(sigma;1,Q)=0。
为了表述死锁避免策略,我们把RGVs和起重机作为用户,而区域,检索和存储站,输送机作为资源。 另外,卡车和起重机可以被看作是货物可以预约的资源。然而,死锁不涉及卡车和起重机,因为利用预订策略保证了检索和存储操作只会在有空闲的卡车和空闲起重机时才进行。但是,某些具体涉及单向输送机和卡车预约的死锁情况能够发生。下面的例子描述了这样的条件。
例如。假设一个有待检索的货物J1正在提货单向输机r1上,等待提前预定的车辆V1来运送。起重机G由另一个货物j2占用着,要在输送机r1卸载货物J2,再由预订车辆V2装载。因此,J2受阻。与此同时,假设货物J3受阻在过道传送带R2,因为它需要起重机g把它放到相应的货架上。最后,车辆V3,那领先于轨道上的其他车辆的小车,在等待输送机R1,而r1必须卸载货物J4。因此,正在等待的车辆V3要到达相邻的存储输送机区域,因此,预订车辆V1和V2无法到达他们的目的地。
6仿真结果
6.1仿真实验说明
本节介绍了仿真研究,对第2节中描述的案例研究,依次应用了死锁检测策略(DDP)[5]和之前提过的DAP策略。 更准确地说,死锁检测/恢复算法允许死锁发生,使用适当的缓冲存储死锁的货物并且检测和消除死锁。
我们假设进入系统的作业已进行排序,通过适当设计的调度。特别的,调度活动通过随机生成S / R建模,服从平均值为150的指数分布。此外,以下调度也选择考虑[7]。进入的请求根据先到先得的标准被排序。要求输送机,或输入/输出站,RGVs和起重机按照先来先服务的服务标准。单指令起重机在他们执行完操作任务后返回起始位置。
选定RGVs调度规则是根据最近距离
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[153756],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 2.3港口吞吐量预测外文翻译资料
- 使用多标准移动通信分层遗传算法的阻抗 匹配网络的宽带优化外文翻译资料
- 移动RFID标签阅读与非重叠串联阅读器在输送带的应用外文翻译资料
- 利用数字图像进行的全场应变测量方法外文翻译资料
- 自然灾害中并发事件的多种应急资源的分配外文翻译资料
- 基于主机的卡仿真:开发,安全和生态系统影响分析外文翻译资料
- 实现基于Android智能手机的主机卡仿真模式作为替代ISO 14443A标准的Arduino NFC模块外文翻译资料
- 探索出行方式选择和出行链模式复杂性之间的关系外文翻译资料
- 信息系统研究、教育和实践的基本立场及其影响外文翻译资料
- 仓储和MH系统决策模型的设计优化与管理外文翻译资料

