
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
基于船舶设计系统E4的通用起重机模型
Hendrik Vorhouml;lter *
Mareval AG
Hamburg, Germany
Email: h.vorhoelter@mareval.de
Jakob Christiansen
HeavyLift@Sea GmbH
Hamburg, Germany
Email: jakob.christiansen@heavyliftatsea.de
Hannes Hatecke
Hamburg University of Technology (TUHH)
Hamburg, Germany
Email: hatecke@tuhh.de
摘要
本文研究了针对船舶设计系统E4的通用起重机。在这个起重机模型的帮助下,船舶和起重机能够更加协调,起升过程也可以更精确地分析。该模型能模拟任何船舶海洋工业用起重机并且提供各种在E4系统中起重机的运动学仿真。特别关注的是:为设计师设计起重机和工程师规划吊装作业,保持共同的用户界面。目前,这样一种通用型起重机还没有在其他的船上实现过。
本文的目的是研究一种能满足各种要求的通用型起重机模型。介绍了模型的工作原理,并通过几个例子来证实其作用。
关键词:船舶设计,软件,海岸,起升,起重机
简介
近年来在海洋产业,用浮体作为基础的起重机的起重量越来越大。一方面,石油天然气工业探索更深水深若要使用自升式或固定式平台已不可行。另一方面,海上风力发电产业需要成本有效的重型起重解决方案。为了提高浮船吊船设计的实用性和适用范围必须开发和提高预测的可靠性,提升作业的操作能力。在大多数情况下,起重机和船舶,他们是经独立设计而安装起来的。有几个原因:通常,起重机和船舶是由独立的公司设计或起重机设计适应于不同船舶类型。因此,起重机是经常被纳入船舶设计过程,仅考虑其所需的空间、重量和载荷表。但是,如果在海上吊装作业,起重船的运行能力达到最大,船舶和起重机必须协调它们的动力性能。因此在船舶设计过程中需要一个完整的起重机模型,而大多数船舶设计系统都没有。
为了克服这个问题,研发通用起重机模型,即项目“HOOK”作为联合研究开发船舶设计系统E4的一部分。项目“HOOK”目的是为早期船舶设计、船舶吊装作业及吊装作业的海上和沿海规划提供一个集成的仿真工具(参见[ 3 ])。下面介绍了该项目的目标,接着描述了船舶设计系统E4及其基本原理。
阐述了通用起重机模型要求。最后,本文总结了应用实例,做了未来工作展望。
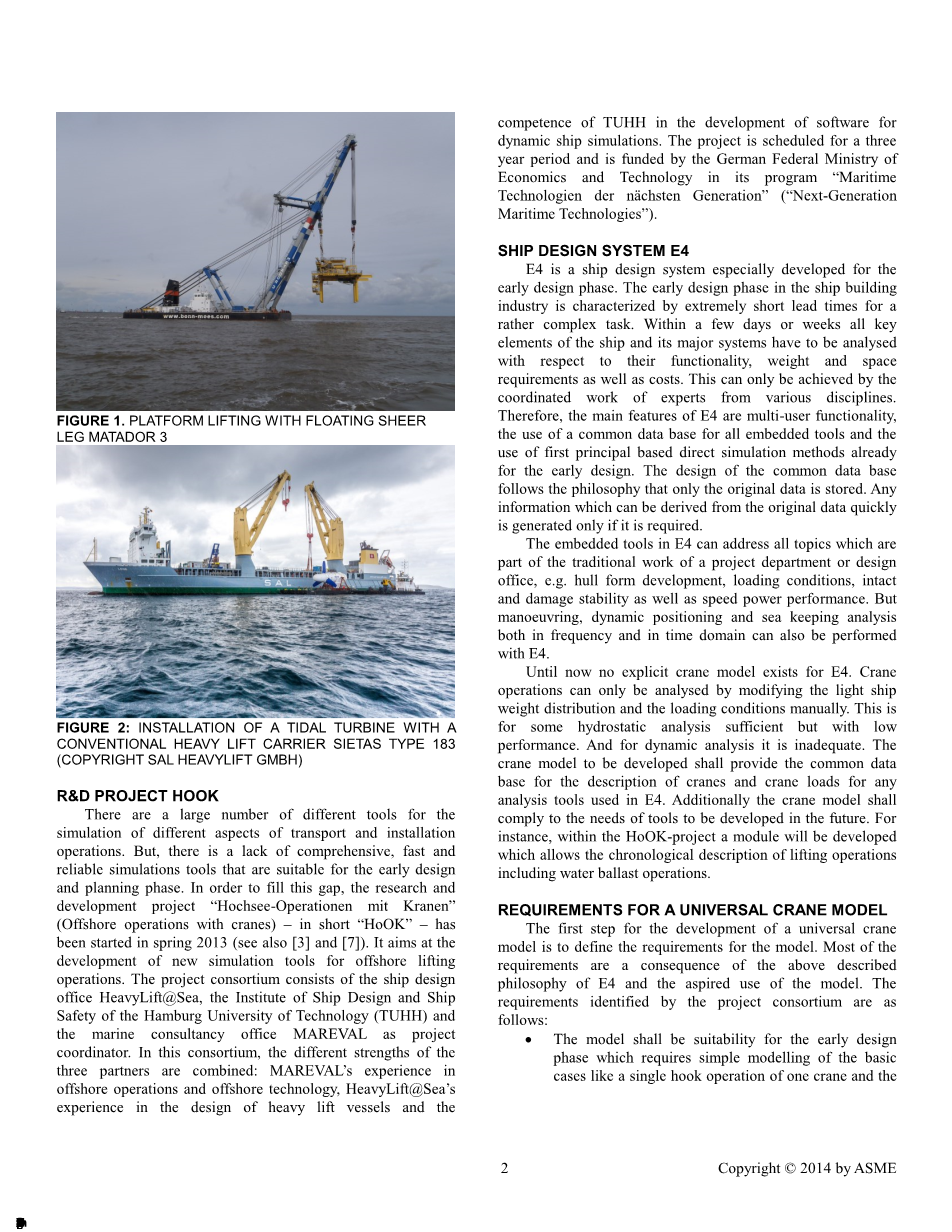
图1.浮式起升平台上巨兽
图2. 潮汐涡轮机的安装 传统重型航母西塔斯型183(萨尔重型公司)研发项目“HOOK”
有许多不同的工具能够进行运输和安装方面的仿真。但是,缺乏全面、快速和适合早期设计及规划阶段的可靠模拟工具。为了填补这一空白,研究和开发项目“hochsee operationen MIT公司”(起重机的海上作业)-小“HOOK”,已在2013年春季开始(见[ 3 ]和[ 7 ])。它的目标是海上起重机新模拟工具的开发。该项目财团由海上重型起重机公司(HeavyLift@Sea)船舶设计办公室,汉堡科技大学船舶设计和船舶安全研究所(TUHH)和马利维海洋咨询办公室项目协调员。在这个联盟中,不同优势三合作伙伴:马利维的海上作业和海上技术经验、海上重型起重机公司在起重船软件开发和动态船舶仿真经验。该项目计划三年期间,由德国联邦政府资助经济学与技术项目“下一代海事技术”。
船舶设计系统E4
E4是针对船舶早期设计阶段的设计系统。船舶建造中,早期设计阶段的特点是交货时间非常短,是一项相当复杂的任务。几天或几周内分析所有船舶系统关键和主要元素的功能,包括重量、空间要求和成本。这只能是通过各学科专家协调工作。因此,E4的主要特点是多用户功能,使用通用数据库,用于所有的嵌入式工具和第一个基于早期设计为主的直接仿真方法。通用数据库的设计遵循原始数据存储的理念。任何信息只有当需要时才产生,可以快速从原始数据中导出。 在E4的嵌入式工具可以解决所有传统工作项目或设计部分的问题, 如船体形式的发展,装载条件,完整和损坏的稳定性以及速度功率性能。用E4也可以分析在频域和时域的操纵、动态定位和耐波性问题。
直到现在,对于E4没有明确的起重机模型。起重机操作只能通过调整轻型船进行分析重量分布和负载条件下手动。
通用起重机模型的要求
通用起重机模型发展的第一步是提出对模型的要求。大多数的要求是上述所描述E4原理和使用期望的结果。该项目财团确定的要求如下:
- 该模型应适用于早期设计需要简单的建模基础,例如起重机的关键参数可快速修改,如负荷或工作范围。
- 先进的模拟需要更详细的关于起重机速度及其极限的信息。
- 必须能够处理所有类型的起重机船舶和海洋工程,如起重机底座与人字架、油缸和钢丝变幅起重机,转向臂架和门式起重机。
- 输入必须被限制的数据,例如船舶设计师对起重机制造商做出要求。
- 起重机的定义、起重机载荷的功能和几何尺寸必须快速呈现在用户界面。
- 该模型必须适合建模和处理多个起重机或钩吊作业。
- 从一个项目到另一个的数据传输必须尽可能和在一个项目中起重机信息更换类似。
- 该模型必须能够计算由起重机载荷和卷扬机引起的垂直静荷载的平衡条件。
- 先进高性能的时域可能需要模拟生成采用,简化模型自动从可用信息。
- 模型必须提供质量、重心和惯性矩以及极限位置和在任意时间起升作业期间自由钢丝绳长的时域模拟。
- 应该有不同的起重机控制方式,如直接控制,通过定义几何参数;如俯仰角或间接控制,确定一个横向位置和钩上甲板的高度。
满足这些要求意味着起重机模型由一个数据库和一些基本功能组成。这些功能是用于计算悬挂式起重装置平衡的基础。
模型的发展
为了开发一个可适用于不同的起重机类型和起重作业的通用起重机模型,有人要问自己起重机的一般定义是什么。字典上说,一个起重机是“可以举起和移动重物的设备,通常由移动臂,梁,或起升齿轮悬浮的龙门”[ 5 ]。这个定义意味着为了能够要模拟起重机,就必须能够模拟一个或几个部件,还能被有关联的机构控制。此外,人们需要制造起重装置模型并进一步控制其机构。起重装置由多个滑轮系统组成。
作为模型不应该被用作起重机设计工具,起初,把起重机的机构和钢丝绳处理成刚体。考虑起重机的刚度需要结构的详细信息。但这些信息是通常对于船舶设计人员或操作员没用。只要对瞬间卸载过程精确建模和不考虑接触,起重作业可以忽略刚度。
下面描述起重机模型的关键要素:运动学模型,执行器操作模型、确定平衡条件的解决方案和控制机制。
运动学模型
用刚体建立起重机构的运动学模型是相互耦合的。起重机的每一个机构都有一个父体,它可以是船舶,并且每个机构可以有多个子体。每个机构都有一个局部坐标系统。局部坐标系确定了机构的重心、惯性矩、顶点和几何尺寸。几何描述用来可视化、风载荷的确定。
子体的位置和方向由相对于父体一个顶点平移和旋转的偏移量来确定。偏移量可以是固定的或可调整的,或各自的自由度(自由度)可以自由。两个机构固定一个自由度,产生一个耦合力或在各绕自轴方向的力矩。这个模型可以描述一台起重机的运动学。多钩操作一个负载是可能的,它需要一个机构耦合多个机构。这些附加连接不仅产生耦合力,而且有运动约束。通过下面的例子说明。
图三:一个机构与其他机构的耦合
图3表示一个杆模型(3)悬挂在起重机不同的钩上(1和2)。这种情况下,机构2为机构3的父体运动模型。因此,刚体3的运动由绕机构2旋转,顶点2与4的相对偏移确定。假定机构2和机构3之间的动力学耦合,平移自由度受到约束但可以自由旋转。顶点1和3连接是机构3的二次耦合。对于这个耦合平移自由度应被约束,有旋转自由度。两个耦合的机构约束的自由度总数一定小于等于6。否则,该机构的负载平衡将无法解决。
由于机构2已经定义了机构3的运动学,机构3的自由度由机构1和2耦合约束。这就要求机构3的平衡位置不仅满足负载平衡,而且顶点之间的偏移量由用户定义。
建模方法和机器人中的多体系统建模相似,详细的信息可参看文献[9]。由于模型是刚性的,不能按照上面的例子建模。
执行部分
如上所述,机构之间的偏移量可以操作的。三种类型的执行器被包括在模型中。滑轮,油缸和回转齿轮,在下面描述细节。动态模拟需要知道执行器的极限速度。最大许用速度取决于执行器的负载,大多数重型起重机都是以这种方式限制的。
滑轮是和有起点终点的钢丝绳组成卷绕系统。起始点和结束点是绞车和端部,钢丝绳多圈卷绕。机构的顶点,轴,直径确定了每个滑轮或绞车,端部由机构顶点确定。卷绕的钢丝绳遵守右手螺旋定则。顶点的位置可根据运动学模型求得,滑轮系统的质量和重心可以由单位长度钢丝绳求得。
图4表示一个滑轮系统,起始于卷筒,绕过三个滑轮,在端点结束。
图4. 多滑轮卷绕系统
对于某些类型的起重机,如近海吊臂起重机,不是任何时候滑轮和钢丝绳保持接触的(参见图9和图10)。必须能够自动识别这些滑轮。作用在滑轮上的负载要计算所有机构的负载平衡(见下面的部分)。
因此,认为滑轮或绞车的负载沿着钢丝绳方向。滑轮负载计算两次:在起点和终点。绳索或链条的悬垂位移可以忽略,因为在工作中,通常其悬垂位移很小。
汽缸被用来连接两个机构的顶点,汽缸是两点的耦合力。
图5. 两机构之间定义一个汽缸
图5为两机构之间确定一个汽缸。两点间的实际位置定义了轴线位置。活塞杆和活塞筒需要可视化。回转齿轮通过两耦合机构的力矩建模。
平衡状态的确定
起重机最重要的部分是起升装置。滑轮从连接在大梁的上导轮放下一个或几个吊钩,由此组成了起升装置。滑轮控制吊钩和大梁之间的距离,但吊钩相对于大梁的旋转自由度被控制在一定范围。平衡状态时,吊钩竖直向下,对于单钩起重,即一个吊钩起升负载,静平衡位置即为组合重心位置。吊钩和起升装置在上导轮正下方。在多钩起重情况下,即一个或多个吊钩连接负载,平衡计算更复杂一些。尤其当使用绞车、斜拉、不同角度斜拉、考虑材料削弱时,将更为复杂。
此外,需要考虑滑轮的非线性。滑轮只能承受拉伸载荷,不能承受压载荷。如果应该考虑这点,需要使用非线性的解决方案,必须提醒用户松弛线。
方程组描述了多体系统的运动。如果起重机系统处于非平衡状态,这便是有缺陷的方案。如果约束没有完全约束多体系统,通过外部的运动学连接器,使载荷平衡。任何起重机系统的静态平衡解决方案在上面描述的模型都可以得到。
控制器
重型起重和海洋产业中使用的各种起重机有不同的作业方式。应该找到一种方法,使得在船舶设计或起重作业中对这些不同类型的操作建模更容易。一个简单的例子是,吊钩的运动模型位置由吊钩到臂架上端的距离确定。设计师或运营商通常不想确定这个距离,例如甲板上吊钩的高度。
因此,在,模型中引入控制器。控制器根据参考数据调节执行器。这些参考数据可以是例如吊钩到甲板的高度或相对于船舶轴吊架角偏转。根据不同的执行器相同数量的参考量,确定控制器是可能的。
模型的应用
在以下四个例子中提到模型的应用。第一个例子是一个简单的模型的早期设计,其次是具有重型臂架的起重机模型和具有一个关节臂起重机的海洋工程船(OCV)模型。最后一个例子是多钩操作海洋平台的浮腿。
早期设计的简单模型
在早期的设计阶段,花在建模上的精力是有限的。因此,有限的输入参数模型是很必要的。关于船舶的实例计算稳定性或纵向强度必须是可能的。一个简单的案例,对于早期的设计例如钢丝变幅,单钩旋转起重机,这是最常见的船用起重机。起重机模型包括四大机构,起重机柱、机器房、臂架、吊钩。如果起重机适用之前的起重机,则只需要输入以下几个参数。
- 起重机柱、机器房高度,臂架长度。
- 四大机构的重量和重心。
- 载荷重量及重心。
- 几何特性、阻力系数(若考虑风载)。
起重机有两单向滑轮-臂架和吊钩的滑轮。控制器根据回转角度、延伸和甲板上吊钩高度控制三个执行器。但是,这些模型的部分对每个项目仍然保持一致,因此可以改变参数。图6展示了起重机模型的可视化。对于每个机构顶点,重心和机构框架都有表示。在附录中给出了起重机的数据。
图6. 起重机模型早期设计
用这种起重机模型可以计算起重机在不同位置的底座支反力及力矩和浮动条件。图7显示了负载160吨和45°起重机变幅角度时,支反力和力矩随回转角度变化关系。在附件中展示了起重机的输入数据。计算了5°左弦向倾斜浮动和船头5°倾斜情况下的反作用力。<!--
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[153510],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

