英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
基于模糊逻辑的感应电动机过电流保护系统
Priyanka Nath, Jamini Das, Abdur Rohman, Tapan Das
摘要——本文演示了使用模糊逻辑的感应电机中过流保护的可行性。感应电机是工业应用中常用的电机之一,因为它提供了优于其他设备的各种优势。主要的缺点是在启动期间摄入非常高的电流,这可能导致系统损坏。基于这个缺点,在这项工作中提出了一种具有成本效益的保护技术。两个输入应用于模糊逻辑控制器以达到目的。提供给FIS编辑器的输入为Current和Time。电流传感器用于感测电流的任何不期望的增加,当该过电流出现时开始计时并且提供给控制器。输出在此上下文中描述了足够的结果。主要目的是限制电流,并在必要时关闭电机。当电流仅在非常少量的时间内为高时,电流被限制。对于长时间不可持续的高电流,电机关闭。
关键词——电流限制,逆时间算法,Mamdani模糊逻辑,过电流保护,两个输入
I.介绍
电动机是电力系统的必然部分,其保护是必要的。 电动机需要适当的保护,防止不期望的情况损坏电机,例如短路,接地故障,过电流,过电压等。本文主要关注感应电动机的过电流保护。
最简单的保护装置是熔断器,其包括可更换部分,即熔断体和保险丝座[1]。熔断器的工作原理是当过电流流过它时,导线开始熔化[2],从而使电路与电源断开。 熔断器是最便宜的保护装置形式,它还提供其他好处,如不需要维护,保护系统没有任何噪音或火焰[3]。有限使用熔断器的原因是它们不适用于非常高的电压和电流。此外,每次单次操作之后的熔断器的替换[4]是非常耗时的。
随着负载、电压和短路的增加,需要一种能够监测系统中的电流、电压、频率和过功率的装置。保护继电器用于实现这一目的[5]。继电器通常与断路器配合,断路器也是一种保护装置,当由继电器检测时,断路器隔离系统中的异常状况。异常条件下的电量与正常条件下的电量不同。继电器通过重复测量电量,如电压,电流和频率来检测异常情况。 每当由继电器检测到故障时,它操作以完成导致断路器断开的跳闸电路[6],从而断开故障电路。
根据结构和操作原理,继电器可以被分类为由DC或AC量驱动的电磁继电器,基于感应电动机原理的电磁感应继电器,电热继电器,物理继电器,静态继电器和电动继电器[7] - [10]。根据它们的应用,它们被分类为欠电压,欠电流,欠功率,过电压,过电流,过功率继电器[11]。过流继电器进一步分为瞬时过流继电器,定时过流继电器,反时限过流继电器,方向过流继电器[12]。
用于过电流保护的工业应用中的大多数现有保护系统使用过电流继电器作为防止大电流的保护元件。过电流继电器的主要困难之一是,如前所述,即使电流有小的偏差,也不能保持电路电源[7]的连续性。此外,它有时间滞后[8],这在短路中是不可取的,难以协调[9],并且需要随着负载的增加而改变。因此,与其在保护系统中的性能相比,这些继电器的成本相当高。最近,已经提出了提供反时限特性的数字继电器,然而,它们仅限于用于电动机的功能期间的保护,并且具有高得多的成本[10]。
在本文中,我们探讨使用模糊逻辑在电机中实现过流保护的可能性。为了实现这种设计,采用电流传感器,定时器,限流器和接触器。电流传感器的主要用途是检测过电流并向定时器提供信号。当电流不太高或可持续时,微控制器向限流器发出信号以限制电流。当电流高到足以损坏电路时,接触器用于将电路与主电源隔离。在本文中,我们将在第二节中展示模糊逻辑的设计方法,在第三和第四章中展示模拟结果和论文结论。
II. 方法
A. 电机过流保护
电流大于设备、导体或机器的额定电流的情况被表述为过电流,过电流是由过载、短路或接地故障引起的,并且可能通过在导体、设备或机器中引起过度或危险的温度升高而引起危急情况。因此,适当的过电流保护被发现是任何电力系统的最基本的约束。
当典型的感应电动机通电时,比标准工作电流大得多的电流涌入电动机,以建立围绕电动机的磁场,并克服电动机及其负载的角动量的缺乏。
在典型的运行环境下,感应电动机的速度几乎保持恒定。 随着电动机的负载增加,它将从电路吸取额外的电流以保持速度恒定。如果该电流过高,则由于线圈的电阻实际上可忽略不计,因此可能由于电动机内部的线圈过热或燃烧而导致对电动机的损害。因此,在这些情况下的适当保护有些必要。本研究工作提出了一种采用模糊逻辑控制的感应电机过流保护系统。
B. 提出的模糊推理系统
在早期的保护系统中,已经观察到,如果电流变得大于电动机的额定电流,则停止电动机而不理会出现过电流的时间。这被发现是不适当的,因为如果电流只有小的变化,它会使电动机运行不连续。近年来,逆时间算法已经工业化,其中进行过电流和时间的测量,并且基于这两个因素,进行适当的决定并且如果必要的话停止电动机。
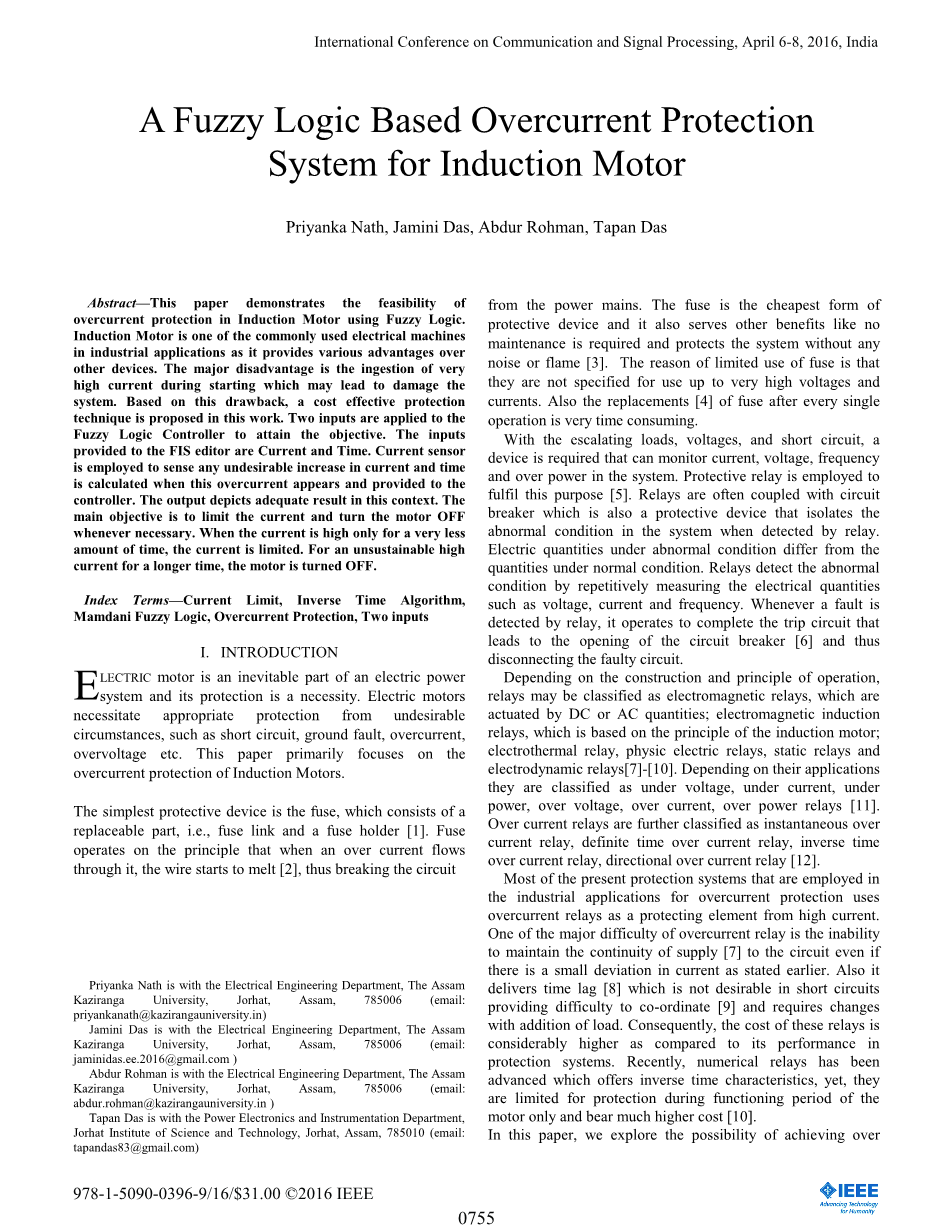
在本文中,我们提出了一种使用模糊逻辑来设计感应电机的保护系统的新技术。由于模糊逻辑可以通过计算相互的电流和时间来提供过渡情况,因此使用这种技术是可以接受的。在这种技术中预期使用MATLAB和Simulink的Mamdani模糊逻辑模型。所提出的系统如下所示(图1):
图1 提出的系统
已经考虑了用于电流和时间的两个输入,并且基于这两个输入产生输出以解决是否必须关闭电动机,或者通过限制通过其的电流来继续操作。输入如下:
- 电流
- 时间
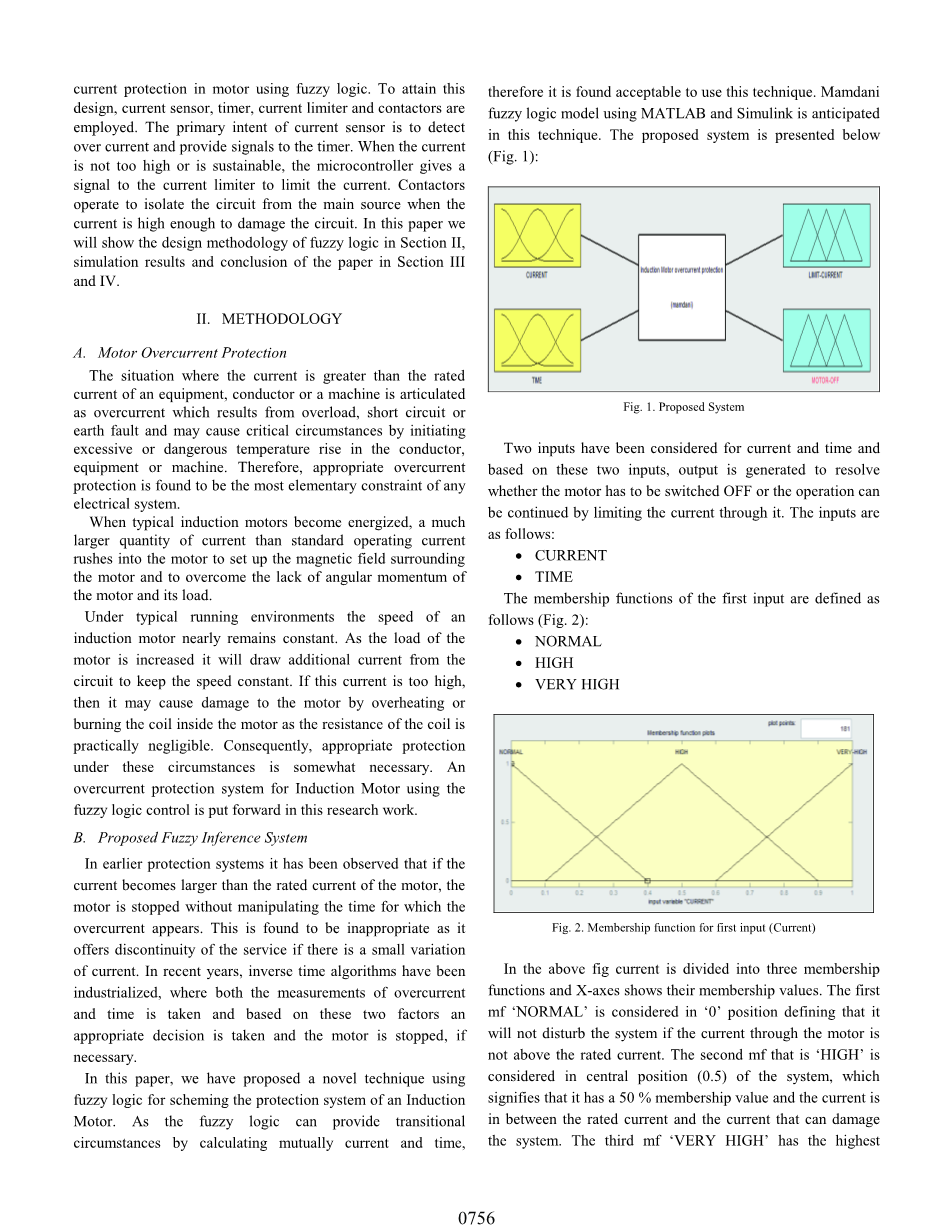
第一输入的隶属函数定义如下(图2):
- NORMAL
- HIGH
- VERY HIGH
图2 第一个输入(电流)的隶属函数
在上图中,电流被分成三个隶属函数,X轴表示它们的隶属函数值。第一个隶属函数“NORMAL”被认为处于“0”位置,定义为如果通过电动机的电流不高于额定电流,它将不会干扰系统。第二个隶属函数“HIGH”被认为在系统的中心位置(0.5),这意味着它具有50%的隶属值,并且电流在额定电流和可能损坏系统的电流之间。 第三个隶属函数“VERY HIGH”具有最高的隶属值1,考虑为通过电路的电流非常高并且具有损坏系统的能力。
第一输入取自电流传感器,其被设置用于感测过电流,并且该电流的值以数字形式提供给微控制器。根据电流的值,控制器将决定保护电路的最佳动作。
第二个输入,时间,也分为如下三个隶属函数(图3):
- LESS
- MEDIUM
- VERY HIGH
图3 第二个输入(时间)的隶属函数
这里,第一个隶属函数“LESS”被置于“0”位置。 第二个隶属函数“MEDIUM”放置在系统的中心位置,它具有50%的隶属值。第三个隶属函数即“VERYHIGH”给出最高的隶属值。如果大电流流过电路较长时间,并且不能限制,电机将停止。
输入“TIME”取自与电流传感器相连的定时器。如果通过电路的电流超过额定电流,则电流传感器将给定时器一个指示,并开始计算出现过电流的时间。根据这个时间和电流的值,控制器将选择系统的最佳动作。
为了映射不同的输入隶属函数组合,采用两个输出,它们是:
- LIMIT CURRENT
- MOTOR OFF
对于第一输出变量,采用三个隶属函数来限制电流的小变化,电流的适度变化和电流的非常高的变化。隶属函数如下:
- LOW
- MEDIUM
- HIGH
图4 限制电流的输出隶属函数(LIMIT CURRENT)
类似地,如果电流太高并且不能被限制,则输出隶属函数将是(图5):
图5仅包括一个隶属函数并且具有最高的隶属值。当大电流流过电路并且不能在非常少的时间内受到限制时,该输出将给接触器一个信号以关闭电动机。
图5 关闭电机的输出隶属函数(MOTOR OFF)
最后,12组规则被良好定义,以绘制输入成员函数与输出成员函数。使用if-then规则定义的规则如下(图7):
图7 if - then规则用于映射输入隶属函数的输出隶属函数
C. 提出的保护系统
所提出的保护系统的示意图如下图所示(图8):
图8 提出的系统原理图
这里考虑的电机是三相感应电机。所提出的系统仅用于单相并且可以用于这样的三个系统的三相电路。
当电源电路中的电流非常高并且控制和保护元件在非常低的电流下操作时,三个电流互感器用于降低高电流并且为电流传感器提供电流。如果在变压器的初级侧中存在电流的任何变化,则也发生次级侧中的电流的成比例变化。
电流传感器感测流过电路的电流,如果发现电流大于电机的额定电流,则它向定时器发送指示。当它获取信号时,它开始计时直到高电流流过电路,并且当电流变得等于且小于电动机的额定电流时自动恢复。由于定时器的输入是数字信号,因此使用模数转换器将电流传感器的模拟输出转换为数字形式。
然后将定时器输出提供给模糊逻辑控制器。A / D转换器输出之一也被提供给模糊逻辑控制器输入,使得基于这两个约束,控制器可以提供合适的输出,无论是限制电流还是停止电动机。 该决定基于在控制器中定义的规则。
为了将电机关闭并限制电流,在电路中使用接触器和限流器。 接触器的三个NC(常闭)触点通过三相连接,如图8所示。
当接触器从微控制器获取信号时,NC触点变为NO(常开)并使电路与主电源绝缘。类似地,当控制器向也通过三相连接的限流器发出信号时,将限制通过电路的电流。
III. 仿真结果和讨论
图9 相对于限流器的时间和电流之间的表面
图9示出了相对于限流器的时间和电流之间的表面。(0,0,0)点表示电流是标准电流,并且没有必要限制电流,因此系统将继续其操作。最高段中的(1,1,1)点示出了在非常长的时间内电流非常高,必须快速地限制电动机。因此,限流器输出将被最大化。
使用五次多项式的表面的方程式为:
系数(95%置信界限):
p00 = 0.1566 (0.1153, 0.198)
p10 = -0.8898 (-1.409, -0.3703)
p01 = -0.7956 (-1.315, -0.276)
p20 = 9.042 (6.336, 11.75)
p11 = 6.315 (4.312, 8.318)
p02 = 6.626 (3.919, 9.333)
p30 = -33.65 (-39.96, -27.34)
p21 = 0.5749 (-3.821, 4.971)
p12 = -10.79 (-15.19, -6.394)
p03 = -20.36 (-26.67, -14.05)
p40 = 48.86 (42.17, 55.56)
p31 = -23.25 (-28.07, -18.44)
p22 = 23.52 (19.14, 27.91)
p13 = -0.3068 (-5.126, 4.512)
p04 = 25.53 (18.84, 32.23)
p50 = -22.61 (-25.24, -19.98)
p41 = 15.29 (13.13, 17.45)
p32 = -7.326 (-9.378, -5.274)
p23 = -8.358 (-10.41, -6.307)
p14 = 4.333 (2.171, 6.495)
p05 = -11.08 (-13.7, -8.447)
图10 相对于切断电动机的时间和电流之间的表面
图10表示相对于切断电动机的时间和电流之间的表面。如果电流和时间的值位于最高的黄色段中,并且电流不能在定量时间内受到限制,则电机被隔离于主电源。蓝色段表示电机处于工作状态。
使用五次多项式的表面的方程式为:
系数(95%置信界限):
p00 = 0.5078 (0.4411, 0.5745)
p10 = -0.07216 (-0.9103, 0.766)
p01 = -0.07216 (-0.9103, 0.766)
p20 = -0.7543 (-5.12, 3.612)
p11 = 3.912 (0.681, 7.143)
p02 = -0.7543 (-5.12, 3.612)
p30 = 4.286 (-5.895, 14.47)
p21 = -11 (-18.09, -3.907)
p12 = -11 (-18.09, -3.907)
p03 = 4.286 (-5.895, 14.47)
p40 = -6.84 (-17.64, 3.957)
p31 = 15.75 (7.973, 23.52)
p22 = 7.031 (-0.04448, 14.11)
p13 = 15.75 (7.973, 23.52)
p04 = -6.84 (-17.64, 3.957)
p50 = 3.399 (-0.8411, 7.64)
p41 = -8.019 (-11.51, -4.531)
p32 = -2.075 (-5.385, 1.234)
p23 = -2.075 (-5.385, 1.234)
p14 = -8.019 (-11.51, -4.531)
p05 = 3.399 (-0.8411, 7.
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[139462],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

