
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
单相有功滤波二极管 - 整流器供电电机驱动方法使用
摘要:本文提出了具有有源电源滤波器功能的单相高功率因数电机驱动系统。由于大多数的连接到电网的电气设备必须符合关于电网电流谐波的规定,自动硬件系统通常配备有由电源开关和电抗部件组成的功率因数校正器,例如,电感器和电容器。反应性组分的大体积增加系统成本,特别是在低成本应用中比如家用电器之类的。在本文中,一个新的能够驱动永磁体电机和滤波器产生的谐波电流电机驱动算法被提出了。因为自输入驱动系统的电流不是被电机电流参考直接控制,而是输出电压参考变频器所控制的。实现精确和即时的控制的电网电流是可行的。提出的算法的有效性被永磁电动机驱动的实验验证系统所验证。
索引术语:主动阻尼,恒定功率负载,dc链路 ,电容器,直流链路电压稳定,电解电容器,电源
因子校正器(PFC)
1.引言
现在的电子技术已经实现变速电机驱动器应用到人的生活中电器,例如空调,洗衣机,冰箱等。虽然速度可变驱动器提高了电气应用的能源效率,电力电子器件的广泛应用极大增加了低压电网中谐波电流的压力。因此,所有连接到电网并具有高达16 A的输入电流的电气设备每相必须符合有关谐波的规定电流发射IEC 61000-3-2。每个谐波分量可允许电流的最大限制已经在规章中制定好。由于谐波电流趋向于随着功率的增加而增加,一些配备二极管整流器的电气设备几乎不可能满足规定。因此,一个由电感组成的被动输入滤波器通常插在电网和系统输入之间。然而,它仅适用于相对小功率器件因为输入滤波器的尺寸随着功率的增加而变大。另一种谐波电流发射的常规解决办法是添加有功功率因数校正器(PFC)。如图所示的PFC拓扑结构。 组成有电源开关和电抗器,它们通过过滤谐波电流使电网电流正弦化。但是,PFC可能导致系统的成本增加和体积增大。从而,对于不使用PFC且能产生少量谐波的高功率因数电器已经有许多研究工作正在展开进行。大多数研究工作是集中在ac-to-dc转换器,但是只有很少一部分在研究驱动系统。
1 在传统的配备了二极管整流器的单相电动机驱动系统中,一个作为提供恒定功率的能量储存器的大直流链路电容器已经是一个惯例了,因为机械负载被认为是需要的恒定功率和dc链路电压的波动并且导致了电机性能的降低。然而,大型直流链路电容器导致导通二极管整流器的不连续性,因此电网电流包含多次谐波。此外,许多在实际应用中的机械负载不一定需要恒定的扭矩,因为机械惯性大到使负载的速度可能不会改变很多。因此,在一些特定应用中,变频器的电容被特别减小去防止二极管整流器的不连续导通。因此,尽管直流母线电压和电动机的输出功率周期性地下降到零由于能量存储的缺失,一个准正弦电网电流可以被实现。此外,减少直流母线电容使替代大型电解直流母线电容器与一个小的金属化薄膜电容器成为可能。消除电解电容器不仅使系统紧凑,而且沿长了系统的使用寿命因为电解电容器的寿命显着短于电解电容器金属化薄膜电容器。
根据图中所提出的功率因数校正方法,电网电流准正弦通过操纵扭矩产生电流参考所控制。然而,输入功率无法通过改变转矩产生电流参考动态电动机电流被立即控制。此外,由于dc链路电压周期性地下降到零,根据需要控制电动机电流就会变得更加苦难。因此,电网输入电流尤其失真,由于失去驱动电流的可控制性,直流链路电压也接近零。因此,一种通过转换电压而不是操控转矩的功率控制方法已经被提出了去克服图中的情况。通过修改电压基准的的直接功率控制有一个因为没有电流控制动力存在所以转换器功率可以被立即控制的优点。
另外,由于功率因数校正方法在中没有考虑其他在系统中连接到同一电网并生产谐波电流的电力负载,系统的总输入电流可能不会满足谐波电流限制的受控驱动器本身可以满足的调节限制。
在本文中,一种新型的电网电流控制方法通过驱动降低整个系统的谐波电流而呈现。被提出的电网电流控制可以被应用到到具有二极管整流器的常规电动机驱动系统前端,并且它可以与常规电机驱动控制器相结合。
本文按以下方式组织。另外,第二节介绍了电网电流控制的概念。然后,扩展到使用电网电流控制容性的有功功率滤波器是在第第三节讲到。最后,在第四节提出的算法的原理和有效性通过使用原型电机驱动系统的实验来验证。
2 电机驱动系统的输入电流控制
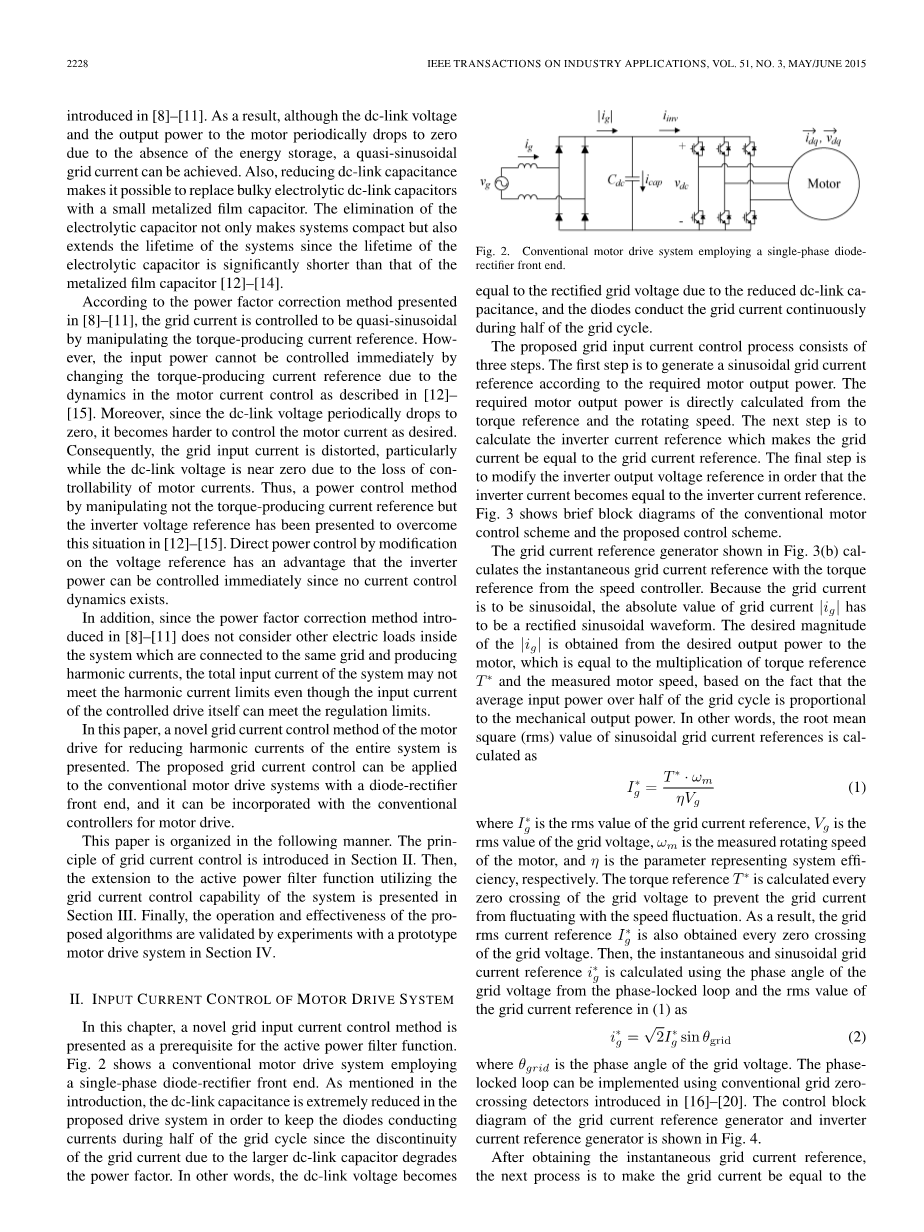
在本章中,一种新型的电网输入电流控制方法的提出是作为有功功率滤波器功能的先决条件。图2展示出了采用的传统电动机驱动系统的单相二极管整流器前端。如上所述介绍,直流母线电容性极大地在提出的驱动系统里降低了,为了在网格的半个周期中使二极管导通电流因为在不连续的电网电流下由于较大的直流链路电容器功率因数会逐渐降低。换句话说,dc链路电压由于减少的直流母线电压而和单相电网电压相等同。
提出的电网输入电流控制过程分成三个步骤。第一步是根据所需的电机输出功率产生正弦电网电流参考。所需的电机输出功率由转矩基准和转速直接计算。下一步是计算使参考电流等于电网电流基准的电网的逆变器电流。最后一步是以修改逆变器输出电压参考使转换器电流等于逆变器电流参考。
图3所示的电网电流基准发生器。用转矩通过速度控制器来估计瞬时电网电流,由于电网电流是正弦的,所以电网电流的绝对值必须是整流正弦波形。所需的幅度从期望的输出功率中获得,,基于超过一半的电网周期平均输入功率是成比例的机械输出功率,也就是说转矩和电动机速度的乘积。从另一角度看,在获得瞬时电网电流基准之后,下一个过程是使电网电流等于参考值。
在图1所示的系统中,由于输入电源到逆变器的输出功率等于功率半导体开关中的电动机损耗,流入逆变器的平均逆变器电流可以近似由其中dc链路电压以及任意d-q基准中的电动机的电流矢量帧求得。假设用于测量的电流传感器和浪涌电动机电流非常准确,只有逆变器中的损耗和死区时间可能会引起误差。然而,由于在较低输出功率期间的逆变器损耗和死区时间操作引起的估计误差并不重要,因为在低功率操作下的电网电流谐波几乎不会超过谐波电流限制。此外,逆变器损耗的比例随着输出功率增加而减小。很多死时间补偿可以通过调整关于电流的转换时间来显著降低。即使死区时间补偿不正确,死区时间只占转换时间的很小一部分。另外,所有电机里的损耗(铜损,铁损等)不影响平均逆变器电流评估,因为电机电流是直接测量并用于计算的。
为了使电网电流等于参考电流,逆变器电压输出应该满足公式因为它是式(5)中唯一的可控变量。如果是常规电机驱动算法,逆变器电压输出由电机电流控制器确定。因此,输入电流控制去协调电机电流控制决定输出电压基准是很必要的。
在所提出的算法中,电网输入电流控制具有比电网电流控制更高的优先级,因为当电动机电流不会快速针对电机电感变化时电流应立即被控制以抑制谐波电流。因此,为了满足电网输入电流方程,电机电流控制器的电压基准由输入电流修正。由于是2-D向量方程,可能有很多修改规则。本文提出的修改过程具体如下。
首先,d-q系中原始输出电压参考矢量是通过类似于常规电机驱动算法的中得电机电流控制器算出的。然后,对电机预测使用的平均逆变器电流和电压矢量在中测量的电动机电流矢量和dc链路电压,期望的逆变器电流逆变器电流会反馈到电网输入电流控制器。最后,用电网输入电流控制器计算需要补偿得电压修正矢量。
因此,最终的电压矢量应用于电压修正矢量补偿参考之间的逆变器电流差就如公式所示。并且由于是2-D向量方程,因此有无穷的解数。因为电压修正基本上是一个对电流的电压扰动,所以幅度最小的电压扰动修正向量是最好的解。找出最小幅值电压修正向量并简单地通过选择是很重要的。输入电流控制的电压修正矢量图被重新调整,通过导出平行于电动机电流矢量的最小电压修正向量。自方向表示测量的电动机电流矢量的矢量矢量可以被重写如公式所示。选择最小电压修正的原因中是减轻由于电压修正引起的问题。即使逆变器电压被尽可能少地修改,电机电流的失真是不可避免的。该电流扭曲导致运动性能的退化,包括扭矩和速度调节。由于这种不利影响性能,所提出的PFC操作并不适合需要高扭矩和速度调节的高性能驱动器。但是,在类似家里电器之类的低成本的驱动器,所提出的驱动系统具有无需附加电路的优点的PFC操作 。
3 有源电力滤波器功能
电器一般不仅由电气电动机组成,还包括其他电气设备,如执行器,拖拉机,电源等。所有这些设备都可以作为谐波电流源,特别是通过没有PFC电路的二极管整流器提供的时候。如图所示,辅助负载由额外的二极管整流器供电。然而在图6中,辅助负载连接到直流总线通过用于隔离辅助负载的直流总线的二极管当主直流母线电压下降时使用主直流母线供电。同时情况下,电网电流包含辅助负载产生的谐波电流,因为没有PFC来运行它。
在本章中,提出了一个即使有其他属于系统的非线性电负载也可以抑制总谐波电流的功率因数校正方法。如果在系统中至少有一个有源PFC,用PFC抑制来自其他负载的谐波电流就是可实现的。由于到电机驱动系统的输入电流可以使用在第二节中描述的输入电流控制方法来控制,电机驱动系统本身可以认为是主动PFC。
虽然修改的输入电流参考导致a输入功率和机械输出之间有不匹配的功率,速度控制器自然通过取电网电流基准的有效值弥补。
谐波电流的上限取决于驱动系统的配置。如图所示,由于二极管电桥阻挡反向电流,逆变器电流和电容器电流必须大于零。这意味着逆变器因为二极管桥的原因不能立即向电网供电,而它可以降低电网中的功率。换句话说,当负载电流包含这么多的谐波电流时逆变器不能进行PFC操作,逆变器必须向电网供电。这决定了PFC配置的能力。逆变器的标准可以作为一个PFC被描述如下,我们可以注意到最大值辅助负载中的谐波电流随电动机增加而功率增加。另一方面,在图中所示的结构中,也可以使逆变器向电源中的辅助负载供电,因为变频器和辅助负载都是直接连接。因此,理论上没有该逆变器能够抑制谐波的上限。然而,实际上不可能的是,逆变器由于电流的限制只能有限地供应辅助负载的功率半导体,电机的速度波动等。输入电流控制和的详细框图有功功率滤波器功能如图所示。 所提出的算法简单地添加在常规上矢量控制器,很容易打开和关闭算法。因此,可以在电动机功率低时关闭。
4 实验结果
为了验证提出的算法,一个原电动机驱动系统采用内部永磁体同步电机。直流链路电容5mu;F的金属化薄膜电容器,以及逆变器开关频率为10kHz。驱动器的详细参数系统在表中列出纸张用数字信号处理器实现。一个实验装置的说明如图所示。首先,输入电流采用提出的电网电流控制算法和常规逆变器的控制算法电解直流母线电容器进行了比较额定负载条件,以验证其有效性提出了用于功率因数校正的输入电流控制。图示出了输入电流波形及其谐波比较常规逆变器系统的部件其配备有680mu;F的直流链路电容器。如图所示在波形中,输入电流具有大的谐波分量,因此可以得出结论,常规逆变器系统具有大直流链路电容器和无功率因数校正不能满足IEC 61000-3-2.所提出的驱动系统的输入电流减少直流母线电容器如图1所示。由于输入电流使用所提出的输入电流控制来主动控制算法,它显示少得多的谐波分量比较达到IEC 61000-3-2的限制。图表示电动机电流波形提出的输入电流控制算法被激活。而电网电流完全改善,如图所示。如图,电动机侧的电流显着地失真由于电压修正功率因数校正。图中描绘的配合扭矩波形。如图所示,可以注意到电机转矩波动大。但是,这是一个自然电动机扭矩以两倍的电网振动的现象频率,因为逆变器电流参考随着电网电流基准| ig |并且存在很少的能量存储。
但是,速度波动的量完全取决于机械惯性。因此,如果电机和耦合机械负载具有较大的惯性,可能不是一个问题到整个系统,因为速度波动微不足道。如果不是,当然可能导致严重的速度波动,和振动。一般来说,扭矩波动两次电网频率(100-120Hz)并不重要在低成本家电应用中。此外,速度控制器几乎不会对这样高的速度变化产生反应如果控制器带宽低于频率波动电网频率。由于扭矩引起的速度波动波纹也在图中示出。如结果所示图。PFC操作在轻电机负载(15%电机负载)和(b在从15%到100%电动机负载的负载变化期间。速度波动约为50r / min,约为1.4%额定转速的实验系统。为验证建议的有功功率滤波函数,a分离的负载,由二极管整流器,直流链路组成电容器为100mu;F,额外的电阻负载为400Omega;连接到如图所示的相同ac电网,图示出仅利用输入电流的实验结果控制算法。电机的机械输出功率为约942W(3600r / min和2.5N·m),并消散额外负载的功率约为210 W.由于输入电流的非线性负载具有很多谐波,电网电流有即使输入电流为相同的谐波电流由于所提出的输入,动机驱动器是相当正弦的电流控制。电机驱动器的直流母线电压被拉低从电网电压的每半个周期下降到零直流链路电容小得可以忽略,而直流链路电压的非线性负载保持在280V以上在直流链路的大电容。图示出了所提出的谐波的有效性电流滤波算法。电机驱动器的输入电流在与非线性相反的方向上被主动控制负载电流。因此,总谐波电流in网格已被显着消除。图。如图所示在高功率因数期间电机的相电流操作。因为电机的输出电压是直接的根据输入电流参考,电机修改电流也周期性地失真。但是,尽管如此电机电流畸变,电机可以产生平均值扭矩与参考值相同,并保持其速度。此外,功率因数几乎为1,如图所示。根据的标准,变频器不能工作驱动功率为零时的PFC。验证轻负载运行,15%电机实验结果负载,其中电机功率不满足中的标准,如图所示。即使是谐波电流从非线性负载不能完全消除,当提出PFC时,电网电流变得更正弦算法开启,导致更好的功率因数逆变器部分消除了谐波电流。图显示从15%负载到负载变化期间的性能额定负载。因为电动机功率足够大额定负载,电网电流变为正弦曲线
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[138126],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

