英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于模糊逻辑监控器的D-STATCOM无功功率补偿装置
Tarun Chugh1 and Alka Singh2
1Nuclear Power Corporation of India Limited, Anushaktinagar, Mwnbai, Maharashtra, India
2Department of Electrical Engineering, Delhi Technological University, Bawana Road, Delhi, India
E-mail: Itarun.chugh91@gmail.com.2alkasingh.dr@gmail.com
摘要:在电力系统中,由于电压不稳可能导致的无功VAR的增减,开闭大电感负载会引起总线上电压的升降。此外,三相四线制配电系统面临着电能质量差的问题,比如,负载不平衡、过中性电流和电流谐波引起的电压畸变。为了保持电压稳定和减少这样的电能质量问题,无功功率补偿装置如配电网静止补偿器可以作为提高配电系统的运行效率和可靠性的功率器件。在D-STATCOM中,通常使用比例积分(PI)控制器以及用于负载补偿的各种控制算法来调节DC链路电容器电压。然而,在负载变化期间,DC链路电容器电压存在相当大的变化,这可能影响补偿。在本文中,提出了一种基于模糊逻辑的监控方法,以提高直流链路的瞬态性能。 基于模糊逻辑的控制器被设计为使得由模糊管理器产生的增益被添加到PI控制器的参考比例和积分增益,这有助于维持DC链路电压,建立一个使用SimPower Toolbox开发的具有电阻电感(R-L)负载的系统的MATLAB / Simulink模型。可以观察到,模糊逻辑监控的D-STATCOM成功地补偿了负载所需的无功功率。 瞬态(负载甩开条件)通过去除负荷的阶段之一要短的持续时间创建。直流链电容器电压被观察时相比只有一个常规PI控制器在使用时没有模糊监督的情况。 据观察,所提出的控制器具有比更好电压调节方面与以往性能更好和更快的稳定时间。
关键词:D-STATCOM;电压调节;模糊逻辑;直流链路;PCC
1.引言
电源质量问题表现为终止用户设备/负载的故障或不正常操作中的非标准电压,电流或频率的发生[1,2]。当前,三相四线分配系统面临不良的电力质量问题,例如不平衡负载,过大的中性电流和由于电流谐波的电压失真。另外,大电感负载的接通/断开导致负载总线处的电压的下降/上升,这是由于V AR需求的增加/减少,这可能导致电压不稳定性。为了保持电压在一个限度内,无功补偿装置如DST ATCOM用作定制的功率器件,有助于提高电力系统的运行效率,而不影响电源的可靠性。D-STATCOM基本上是分流连接的定制功率器件,其在公共耦合点(PCC)注入电流并用于控制端电压并改善功率因数[3-5]。在DSTATCOM中,使用各种控制算法来调节DC链路电容器电压,并且用于负载补偿。 在[3]中使用传统的PI控制器用于基于分布式发电(DG)源的同步参考框架理论的负载补偿。对于D-STATCOM,使用修改过的功率平衡理论[4],因为其简单的制定和易于计算。在[5]中,DSTATCOM用于电压骤降减轻和功率因数校正。近年来,模糊逻辑控制器(FLC)已经得到了各种应用的重视[6] - [10]。使用FLC的主要优点是它不需要对系统有太多的详细了解。 [6]中讨论了D-STATCOM的VSI额定值和接口滤波器尺寸的计算方法。在文献[7]中,提出了一种基于模糊逻辑的方法来调节负载变化期间的直流母线电压。在[8]中,基于模糊逻辑的DSTATCOM已经被模拟用于线性和非线性负载的电流平衡和谐波补偿。参考文献[9]涉及用于校正分布式系统中的电压骤降,增强和中断的模糊技术的应用。在[10]中,提出了一种用于D-STATCOM的模糊和混合模糊逻辑控制器,用于补偿快速变化的不平衡和非线性负载。基于现有的基于模糊逻辑的D-STATCOM的文献调查,观察到需要设计一种方法来改善D-STATCOM的瞬态性能,例如加载/重载椭圆负载,负载 不平衡,非线性负载等。在本文中,提出了一种基于Mamdani模糊逻辑的监控方法来改善直流链路的瞬态性能。基于模糊逻辑的监控器在负载变化之后的瞬态期间改变PI控制器的比例和积分增益。当D-STATCOM连接到PCC时,由于PI增益的妥善/适当的变化,获得控制器的性能的改进。与不使用模糊监视的情况相比,电压波形还具有更快的建立时间。使用SimPower Toolbox详细的MATLAB / Simulink仿真研究证明了所提出的策略的性能。
2.D-STATCOM的模型
- 介绍
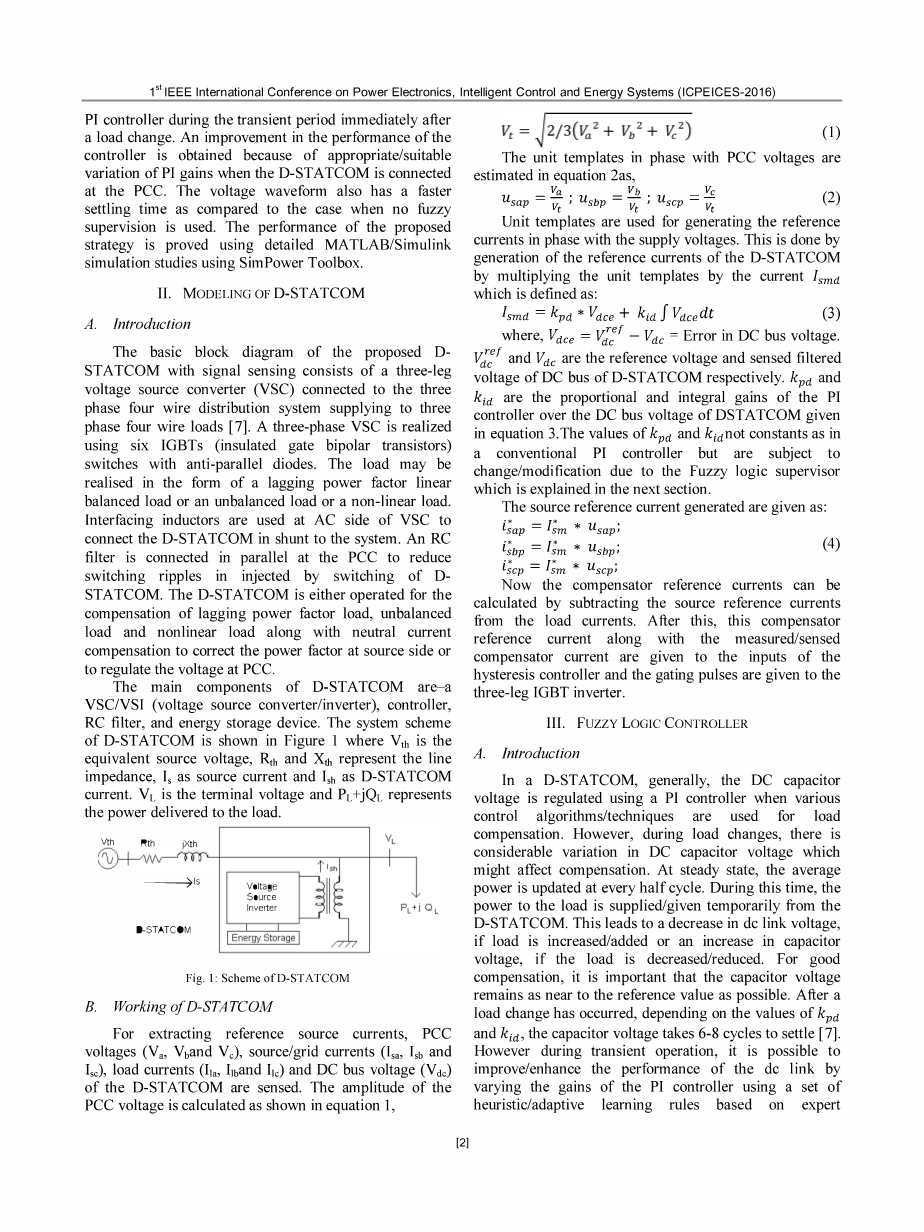
所提出的具有信号感测的DSTATCOM的基本框图包括连接到三相四线分配系统的三相电压源转换器(VSC),其提供给三相四线负载[7]。使用具有反并联二极管的六个IGBT(绝缘栅双极晶体管)开关实现三相VSC。负载可以以滞后功率因数线性平衡负载或不平衡负载或非线性负载的形式实现。在VSC的交流侧使用接口电感,将D-STATCOM分流连接到系统。在PCC处并联连接RC滤波器以减少通过DSTATCOM的切换注入的开关纹波。D-STATCOM操作用于补偿滞后功率因数负载,不平衡负载和非线性负载以及中性线电流补偿,以校正电源侧的功率因数或调节PCC的电压。D-STATCOM的主要组件是VSC / VSI(电压源转换器/逆变器),控制器,RC滤波器和能量存储设备。 D-STATCOM的系统方案如图1所示,其中Vth是等效源电压,Rth和Xth表示线路阻抗,Is是源电流,Ish是D-STATCOM电流。 VL是端电压,PL jQL表示输送到负载的功率。
B.D-STATCOM的工作
为了提取参考源电流,感测D-STATCOM的PCC电压(Va,Vband Vc),源/栅电流(Isa,Isb和Isc),负载电流( and)和DC总线电压(Vdc)。如等式1所示计算PCC电压的幅度
(1)
与PCC电压同相的单元模板在等式2中被估计为:
; (2)
单元模板用于生成与电源电压同相的参考电流。 这是通过将单元模板乘以电流Ismd产生D-STATCOM的参考电流来完成的,其定义为:
(3)
当 =直流母线电压误差时,和分别为D-STATCOM的直流母线的参考电压和感应滤波电压,和分别是PI控制器对等式3给出的DSTATCOM的DC总线电压的比例和积分增益。和的值不像常规PI控制器中的常量,而是随着模糊逻辑管理器而改变/修改,这将在下一部分中解释。产生的源参考电流如下:
(4)
可以通过从负载电流中减去源参考电流来计算补偿器参考电流。 此后,该补偿器参考电流以及测量/感测的补偿器电流被提供给滞环控制器的输入,并且门控脉冲被提供给三脚IGBT逆变器。
3. 模糊逻辑控制器
A.介绍
通常,在D-STATCOM中,当各种控制算法/技术用于负载补偿时,使用PI控制器来调节DC电容器电压。然而,在负载变化期间,DC电容器电压存在相当大的变化,这可能影响补偿。 在稳定状态下,每半个周期更新平均功率。在此期间,暂时从D-STATCOM提供/给予负载的电源。这导致在直流链路电压的降低,如果负载增加/升高或增加电容器电压,如果负载被减小/降低。为了良好的补偿,电容器电压保持尽可能接近参考值是很重要的。在负载突然发生变化之后,根据和的值,电容器电压需要6-8个周期来稳定[7]。然而,在瞬态操作期间,可以通过使用基于专家知识的一组启发式/自适应学习规则改变PI控制器的增益来改善/增强直流链路的性能。 基于模糊逻辑的直流链路PI控制器增益的监控改善/增强了直流链路电压控制的瞬态和稳定性能。 因此,对于这种情况使用模糊逻辑是合理的。
B.基于模糊逻辑的PI控制器
文献显示了许多方法,其中PI控制器已被模糊控制器代替[6] - [11]。然而,不是完全修改控制动作,而是使用模糊控制通过监控增益来使用辅助控制级别就足够了 技术来提高系统的性能。 基于传统模糊推理法和模糊逻辑的PI控制器被设计为使用DC电压误差和DC电压误差的导数来控制功率因数。在这项工作中提出的基于模糊逻辑的PI控制器如图2(a)和(b)所示,其中,和 分别是PI控制器的期望DC电压,实际DC电压和输出。变量DKp()和DKi()是模糊逻辑控制器的输出,分别添加到和,以获得PI控制器的比例和积分常数。对于基于模糊逻辑的PI控制器,选择三角隶属函数来表示电压误差,电压误差变化,DKp()和DKi()。输入和输出选择国际标准的规范。为了构建规则库,在下一个子部分[11]中阐明,电压误差,电压误差率,DKp()和DKi()被分割成各种主要模糊集。
在这种情况下,控制变量是其用于产生DSTATCOM的参考电流。计算补偿器的参考电流与测量的补偿器电流进行比较,并作为滞环控制器的输入。 产生选通脉冲并将其提供给3分支VSC。
C.模糊逻辑控制
模糊监控器的输入被选择为直流链路电压的误差和直流链路电压的误差变化。
(5)
在(5)式中,err(i)是误差,derr(i)是第i次迭代中误差的变化。是参考直流链路电压,Vdc(i)是第i次迭代中的直流链路电压。 模糊监督的输出被选择为kpd值的变化和Kid值的变化,如图2(b)所示。
(6)
和是参考值,DKp()和DKi()是模糊逻辑管理器的输出。模糊化接口将输入调整为其中它们可以由推理机制使用的形式。 它接收输入信号并且向隶属函数分配隶属函数,在其范围上输入信号下降。常用的输入隶属函数是三角形。 选择了七个三角隶属函数:LN(大负值),MN(中负值),SN(小负值),Z(零),SP(小正值),MP(中正值)和LP(大正值)的误差(err)和误差的变化(derr)[7,8,11]。
D.结构功能
err和derr的隶属函数如图3和4所示。
E.规则库
规则库设计中涉及的要点如下:
- 如果误差很大,并且误差的变化显示直流链路波形偏离参考,则增加Kpd.
- 如果波形接近参考值,则增大Kid值以减少过冲并改善设置时间。
牢记这些方面,已经针对DKp()和DKi()开发了两个规则基矩阵,如通过定义输入和输出的模糊集合。
电压误差err= {LN, MN, SN, Z, SP, MP, LP}。
电压变化误差 derr= {LN, MN, SN, Z, SP,MP, LP},
比例增益的变化DKp()= {Z, S, M, L},
积分增益的变化DKi()= {Z, SKi, LKi}.
其中,err,derr,DKp()和DKi()分别是电压误差,电压误差变化,比例增益变化和积分增益变化。
用于FLC的规则库的 规则,其中电压误差和电压误差的变化作为输入,规则如下:
R_n:如果(电压误差为err_i)和(电压误差的变化为derr_j)且(比例增益的变化为DKp_k)和(积分增益的变化为DKi_l).
其中,R_n,n = 1,2, ... Nmax,是个模糊规则,并且err_i,derr_j,DKp_k和DKi_l中i,j,k,I = 1,2,...,5,是主要模糊集合[11]。
表1给出了的规则基矩阵,表ll给出了的规则基矩阵。用于(DKi)的输出隶属函数是LKi,SKi和Z,并且用于(DKp)的输出隶属函数是L,M,S和Z。
F. 去模糊化
将模糊阻抗转换为简单控制动作的方法称为去模糊化。 “重心”方法已经用于这项工作。图5和图6分别示出了为和选择的输出成员函数。
4. 系统配置
A.介绍
在本章中,基于模糊逻辑的监控器控制被设计为操纵/调整用于D-ST ATCOM的DC链路电压控制的PI控制器的增益。源电压被假定为平衡的正弦波和刚性。假定电压源是415V(rms)和50Hz频率的理想正弦波。假定星形连接的三相R-L负载具有8.5kW的实际功率摄入和4.25kV Ar的无功功率摄入,如图7所示。系统的参数在表III中给出。 基于VSC的D-STATCOM将无功功率注入公共耦合点(PCC)。使用修改的功率平衡理论产生参考电流。 可以看出,模糊逻辑监控的D-STATCOM成功地补偿了负载所需的无功功率,如图9所示。因此,在t = 0.2秒时达到稳定状态。 现在,通过在短时间内(即从t = 0.3到0.4秒)移除负载的相位之一来创建瞬态(负载突发)。 可以看到直流链路电容器电压。 图8示出了为DC链路PI控制实现的模糊监控器。直流母线电压误差和误差变化的隶属函数分别如图3和图4所示。DKp和DKi的隶属函数分别如图5和图6所示。 图11中示出了模糊逻辑管理器的去模糊化输出,即瞬变之前和之后的和值。
将DC链路电容器电压与仅使用常规PI控制器而没有模糊监视的情况进行比较。
在情况A中,使用没有模糊逻辑监视的常规PI控制器。 D-STATCOM提供负载所要求的无功功率。 当通过从t = 0.3至0.4秒去除负载的相之一而产生瞬变时,DC链路电压从699.5V(参考)的稳态值
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[138114],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

