
英语原文共 6 页
海上起重机的建模和仿真
0121318380403 机设1502 陈晓昆 翻译
摘要
本文利用机器人建模理论和起重机和船舶的动力学的数值模拟对起重机系统进行了数学建模。 模拟在SimulationX和Matlab Simulink中执行。 仿真平台包括起重机的SimulationX模型,使用海洋系统模拟器(MSS)和水动力海上保持计算(VERES程序代码)的船舶真实模型。 仿真结果表明了实际起重机在近海环境中的动态特性,并验证了所提出的建模方法的有效性。
索引术语 - 建模和模拟,起重机,SimulationX.
.引言
如今近海船舶上的起重机正应用于世界各地的各种作业环境。根据具体操作、起重机的尺寸、起重能力、接头数量等因素的不同而有所差异,同时它们的设计也与环境和所需的工作区域有关。 由于采用了定制设计,起重机可以放置在各种各样的船舶上。 有许多软件工具可用于起重机液压系统的建模和仿真。 在以前的研究中使用的建模工具包括MathWorks的SimHydraulic [1],MSC [2]的Easy5,ITI的SimulationX [3],Controllab [4]的20-sim等等。这些程序为液压元件提供标准库,使得这些元件可以参数化并且进行一定程度的修改。
海上起重机的大小和性能各不相同。然而,它们大多有一个相似之处,可以用机器人建模理论进行数学描述。海上船只的数学建模主要有两种:航海模型和机动模型。其中航海模型描述了海国如何以恒定的速度和航向影响船只的移动,而机动模型则描述了船只在平静的水中受推进力影响的水平平面运动。
本文利用VERES和MSS的流体力学原理,实现了基于[5]的统一模型。利用机器人建模理论,对起重机模型进行了数学推导。在拉格朗日运动方程的推演过程中,包括相关势能和保守力也考虑在内。案例研究进一步说明如何将潜在的力和增加的质量包括在模型中。 在起重机上实现了逆运动学算法,并采用了容器运动学方法。在SimulationX中实现了所开发的起重机模型。通过将起重机动力学引入Simulink,实现了起重机与船舶之间的耦合动力学。
.起重机和船舶的数学建模
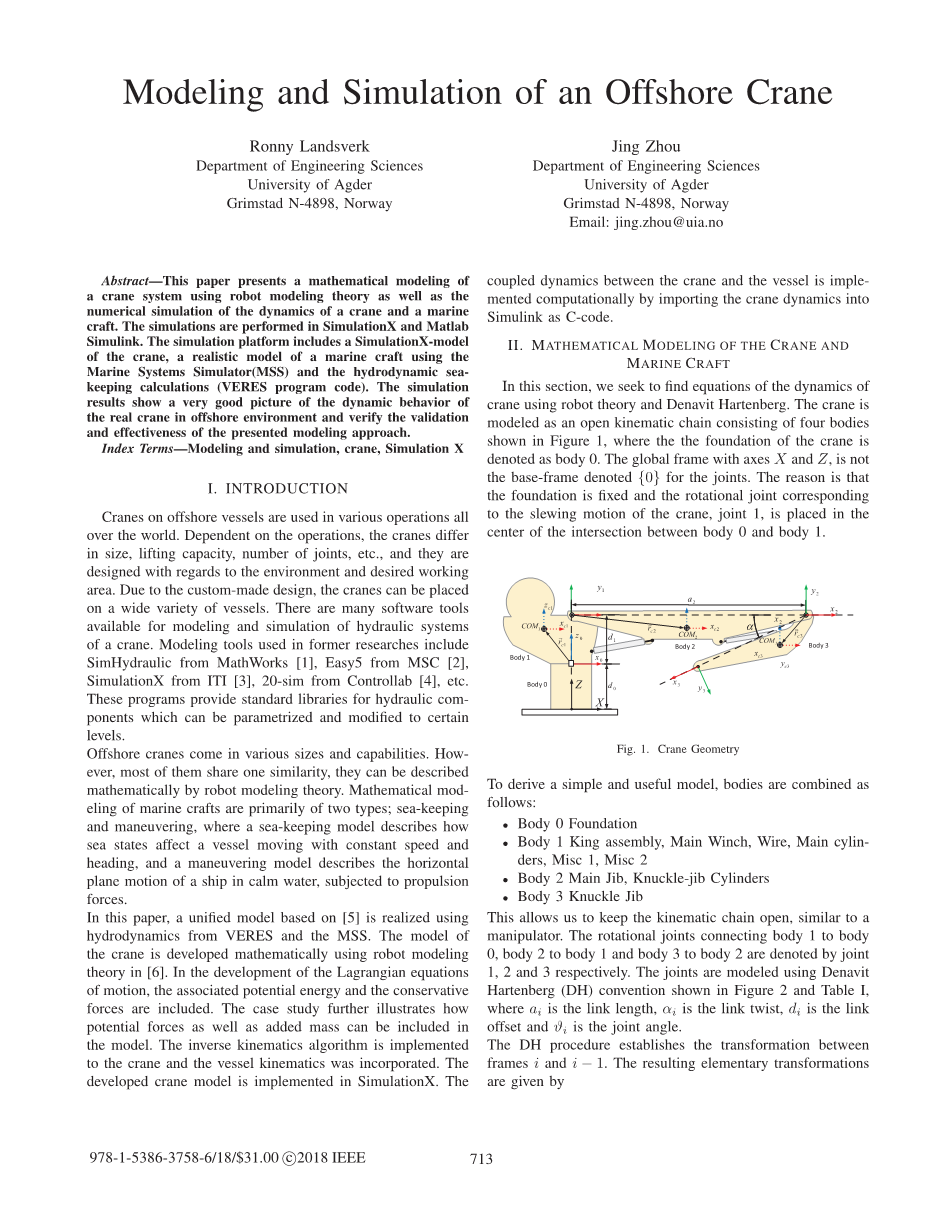
在本节中,我们试图用机器人理论和Denavit Hartenberg矩阵来寻找起重机的动力学方程。起重机被建模为一个开环的运动学机构,由图1所示的四个主体组成。其中起重机的基座记为主体0。机构带有X轴和Z轴的全局框架,并且没有将关节 0作为基准。原因是基座固定,与起重机回转运动相应的旋转关节,即关节 1,放置在主体 0与主体 1交点的中心。
图1 起重机几何结构
为了推导出一个简单而实用的模型,机构组合如下:
●主体0基座
●主体1主装配,主绞车,电线,主缸,其他
●主体2主臂,转向节臂
●主体3指关节夹具
这允许我们保持运动链开环,类似于操纵器。将主体1连接到主体0,主体2连接到主体1和主体3连接到主体2的旋转接头分别由接头1、2和3表示。使用图2和表I中所示的Denavit Hartenberg(DH)惯例对关节进行建模,其中是链路长度,是链路扭曲,是链路偏移和是关节角度。
图2 运动学模型
表1 DH参数
D-H方程建立主体i和i-1之间的转换。得到的初等变换由下式给出:
短手记号和分别用于sin()和cos(), 和用于sin()和cos(),还有 = sin(- pi; alpha;)和c3 = cos(-pi; alpha;)。
均匀变换矩阵由下式给出:
- 框架和关节之间的几何雅可比
几何雅可比矩阵是一个矩阵,这个矩阵将框架i的水平速度 、竖直速度与关节速度建立联系,可表示为:
其中是沿z轴的单位矢量,是从基框架到框架i的方位矢量。考虑到所有关节,总几何雅可比行列式是:
B.动能和势能
拉格朗日方程其中的拉格郎日定义为=K-P,其中K和P是动能和势能。此外,我们表明可以写出系统的动能方程为:
其中惯性矩的动能可表示为:
其中是主体i的质量,是相对于{0}的旋转矩阵,而是相对于质心的惯性二元。
系统的势能可表示为:
其中g=(0,0,), 是海平面上的引力常数。
请注意,所有这些参数现在都已知,我们已准备好根据拉格朗日方程推导出运动方程:
- 起重机动力学方程
通过计算系统动能和势能并使用欧拉 - 拉格朗日方程,我们获得了以下起重机动力学方程。
其中,科里奥利-向心矩阵表示为:
其中C()的元素是:
最后一个术语是最容易获得的,因为它不涉及矩阵乘法。对于我们的系统,我们只是写成:
III.模拟中的起重机建模
在本节中,起重机使用理想的扭矩源和理想的力源在SimulationX中建模。SimulationX是一个面向对象的多物理建模和仿真环境。它有一个图形用户界面,其中块通过传输流量变量的线连接在一起。使用STereo Lithography(STL)方便地建模起重机,STereo Lithography(STL)是CAD模型,其中相对于坐标系给出几何形状,该坐标系被定义为类似于分析模型的前一个关节框架。这样可以最大限度地利用库块,如图3所示,其中我们显示了四个物体的网络模型表示,这四个物体由三个驱动的旋转接头和三个一维扭矩连续连接,用于驱动接头。我们使用线性力来相对于彼此移动物体。在图3中,起重机的基础固定在环境中。rev1-block代表连接国王和基础的旋转关节。请注意,我们已将一个由COM1表示的小体放置到相同的运动学上连接器。任何具有动力连接器的刚体直接连接到运动连接器将牢固地连接到前一个元件。COM1的位置在身体的质心1.包括这个身体的原因是更容易提取运动学测量。其他虚拟体也是如此。使用致动的棱柱形接头块和双极力接口块。积分是虚拟体。它们代表真正的起重机的汽缸 。分析模型的刚体与该网络的刚体块之间的关系如下:主体0-foudation,体1-King,COM1和p1,主体2-Jib,COM2,p1和p2,以及主体3- KJIb,虚拟,TCP,COM3和p4。
IV.海洋工艺模型和波浪动力学
一般非线性统一海洋工艺模型,在向量化形式(包括状态空间流体记忆模型mu;和粘性阻尼 )可以根据Fossen [7]编写:
其中M = , 是刚体质量矩阵,是无限频率加质量矩阵, 和是与质量矩阵相关的非线性科里奥利向心矩阵,包含粘滞阻尼,G是捕获的矩阵恢复力和是船与海洋之间的相对速度。运动学模型可写为:
其中是船舶的坐标矢量(这里使用欧拉角)。注意,eta;描述了体坐标框架{b}相对于总体框架{n}。右边是合力/力矩向量,包括来自波浪、阻力和起重机的力和力矩。海浪由2D波谱描述S(omega;,psi;)=S(omega;)D(psi;,omega;)其中omega;是波频率,psi;是波方向。图4显示了波峰S(omega;)的例子,峰值频率 = 1 rad / s,有效波高 = 5 m,图5显示了扩散函数D(psi;,omega;)跟随海洋的能量峰值方向。
沿着海面的一个点(x,y)在时间t并包括N波频率和M方向的总高程由下式给出:
其中是对应于深水色散关系的波数,其中g是海平面的引力常数。是与特定谐波分量相关的相位角。从Faltinsen [8]中,建议在区间内使用随机波频率和方向:
V. 来自力RAOs的波涛力
关于海洋动力学理论发展的巨人之一来自[8]中的书。在海洋工艺动力学的各种文本中都参考了海上结构的海上负荷。本文中使用的流体动力学工具背后的理论,即VERES,是基于条带理论。以下讨论来自VERES理论手册[9]和书[7]。通过对船体表面上的压力进行积分来计算流体动力。除了找到增加的质量,潜在的阻尼D和恢复矩阵G,VERES也找到了所谓的船舶与波浪之间的波浪传递函数。图6基于[7]。
在VERES中,基于波浪势的压力集成在船体上,产生两个部件,一个是由于波浪,另一个是由于机构运动。激振力和时刻在福森的书中以振幅表示,其中和表示对波与船之间的频率和相对航向的力依赖性,dof = 1,2,3,4,5,6表示自由度,并且j= 1,2表示一阶或二阶分量。恒定相对航向psi;的波浪力/矩表示为:
其中U是前方船只速度,而是遭遇频率表示为:
图3 包含气缸的SimulationX
图4 JONSWAP与Torset-Haugen光谱
图5 波能传播函数
图6 力RAOs
VI.在MSS中的船模型
海洋系统模拟器(MSS)[5]是在NTNU开发的Simulink工具箱。该工具箱查找在VERES [9]中执行的参数和计算。为了获得MSS形式的血管模型,必须进行频域识别(FDI)程序以根据状态空间模型获得流体记忆模型表示[10]。图(7)显示了代表容器的Simulink框图。六自由度框图计算图8中所示的所有自由度的响应,并相应地突出显示术语。
图7 船舶框图
VII.在MSS中虚拟起重机
SimulationX模型作为C语言导出,并作为S函数导入Simulink环境。能够耦合动力系统(即起重机和船舶)的元件称为Sig2MBS。通过SimulationX中的代码导出向导,可以选择各种输出,输入和参数,从而生成表示的S功能块起重机。输出是起重机反作用力/力矩和联合变量和。输入是血管坐标eta;,速度nu;和加速度,以及所需的关节参考角判断。在图9中示出了起重机相对于船体固定框架的位置和初始配置。框架{B}的起源,即起重机的基架是点,原点框架{b},即身体固定的容器框架是点。坐标向量所描述的标架{b}关于的姿势的全局标架{n},最初与标架{b}重合。同时,注意{n}是一个东北-东向下的框架。
图8 六自由度框图
图9 船的重要参数和点
VIII.起重机与船舶耦合动力学仿真结果
A.模拟概述
图10显示了我们解决方案的概览图。Simulink模型中的红线处于活动状态。该程序包括以下部分。
●SimulationX起重机模型,通过c代码导出到Simulink S功能
●海洋工艺模型 - 部分基于VERES,部分基于MSS
●MSS波浪模型
●基于VERES结果的FDI流体记忆模型
●强制来自VERES的RAO通过MSS产生波浪力
B.耦合动力学
为了测试起重机和船舶之间的耦合动力学,使用相同的波浪组件进行两次模拟,但其中一个包括起重机而另一个不包括起重机。研究案例是我们将起重机转向右舷,同时提升主臂和转向节臂,然后(20秒后)我们开始摆动起重机,同时面向右舷。模拟期间的波谱是具有显着波的JONSWAP谱
高度= 5 m,峰值波周期 = 11.2秒,峰值方向psi;= 30∘。使用MSS生成海洋状态可视化,如图11所示。由此产生的浪涌,摇摆,起伏,俯仰,偏航在图12和图13中示出。在图14中更清楚地示出了耦合动力学,其中我们在视觉上可以看到船舶开始与起重机一起振荡。
IX.结论
本文利用机器人建模理论对起重机系统进行了数学建模,并对起重机和船舶的动力学进行了数值模拟。仿真平台包括起重机的SimulationX模型,使用MSS的船舶的真实模型和流体动力学代码VERES。仿真结果表明了真实起重机在近海环境中的动态特性,并验证了所提出的建模方法的有效性和有效性。它展示了一个建模和仿真平台的成功开发,用于研究海上起重机和船舶之间的耦合动力学。它还表明了如何方便地开发一种折臂式起重机的分析刚性多体模型。
X.鸣谢
作者要感谢MacGregor AS,NTNU,SINTEF Ocean AS和Skipteknisk AS的帮助。
参考文献
[1] S. Vechet and J. Krejsa, “Hydraulic arm modeling via matlab simhydraulics,” Engineering Mechanics, vol. 16, pp. 287–296, 2009.
[2] Y. Li, P. Wang, L. Ai, X. Sang, and J. Bu, “Study on hydraulic circuit simulation based on msceasy5 for the arm of excavator,” Advanced Materials Research, vol. 291-294, pp. 2281–2286, 2011.
[3] E. Jiang, S. Wang, J. Du, X. Xu, and W. Li, “Simulation of the nozzle electrohydraulic servo valve with iti-simulation,” Advanced Materials Research, vol. 690-693, pp. 2912–2917, 2013.
[4] E. Aridhi, M. Abbes, and A. Mami,
资料编号:[4842]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

