英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
一个基于低电压穿越测试短时间风力涡轮机系统的人机页面
摘要:本文介绍了一种对称多级电平转换器的方案实现,可以用作故障发生器,用应用于并网风力发电机的低压穿越试验。转换器能够模拟实际电力系统中可能发生的主要故障,在测试期间对电网没有明显影响。所提出的系统由三个控制级别组成:人机界面(HMI),中央单元和每个功率单元中的本地控制器。电池由背对背单相全桥转换器,测量电路和数字信号处理器(DSP)组成,数字信号处理器(DSP)通过电网侧转换器控制直流总线电压,并执行输出侧的调制转换器。中央控制器也是一个DSP,可以为单元产生电压参考,并将其与中央DSP进行同步。 HMI由Raspberry Pi及其外围设备组成,是本文的主要焦点。最后,显示了实验结果来证明所提出的系统。
1.引言
风力发电的不断增长与并网风力发电技术的新发展密切相关。 据欧洲风能协会介绍,2015年跨越欧洲的风能转换系统(WECS)超过13GW,德国领先市场[1]。 因此,许多国家的电力系统运营商(PSO)开始要求WECS积极参与控制其所连接的电力系统。 传统发电厂(水电,热能等)的许多电网规范[2] - [6]中提出的运行要求是无功补偿,初级频率控制和低电压穿越能力。 因此,世界各地的PSO正在更新其电网规范,要求风力发电机积极参与上述控制动作,其方式如WECS的行为变得类似于传统的同步发电机。
最重要的电网规范要求之一是低电压穿越能力。 在某些类型的故障中,风力发电机必须保持连接到电网,并且在某些情况下甚至在故障期间为电网提供反应支持[3] - [6]。 因此,风力涡轮机制造商必须测试和认证其风力涡轮机承受这些操作要求的能力。 文献[7],[8]提出了采用双向二级逆变器/整流模块的故障发生器。 然而,这些转换器在其输出端子需要大的LC滤波器。 对于传统的三电平转换器,输出线间电压的电平数量是有限的,并且可能会出现风力涡轮机控制器和LC滤波器之间的不期望的相互作用。
在这方面,本文介绍了用于模拟电网故障的级联多电平转换器的实现,用于并网风力发电机的低压穿越测试。 转换器能够模拟实际电力系统中可能发生的主要故障。 使用该转换器,也可以模拟公共耦合点(PCC)处的电网阻抗。 随着多电平转换器减少输出线间电压的失真,输出LC滤波器可以减少甚至完全抑制,减轻与被测WECS的相互作用。
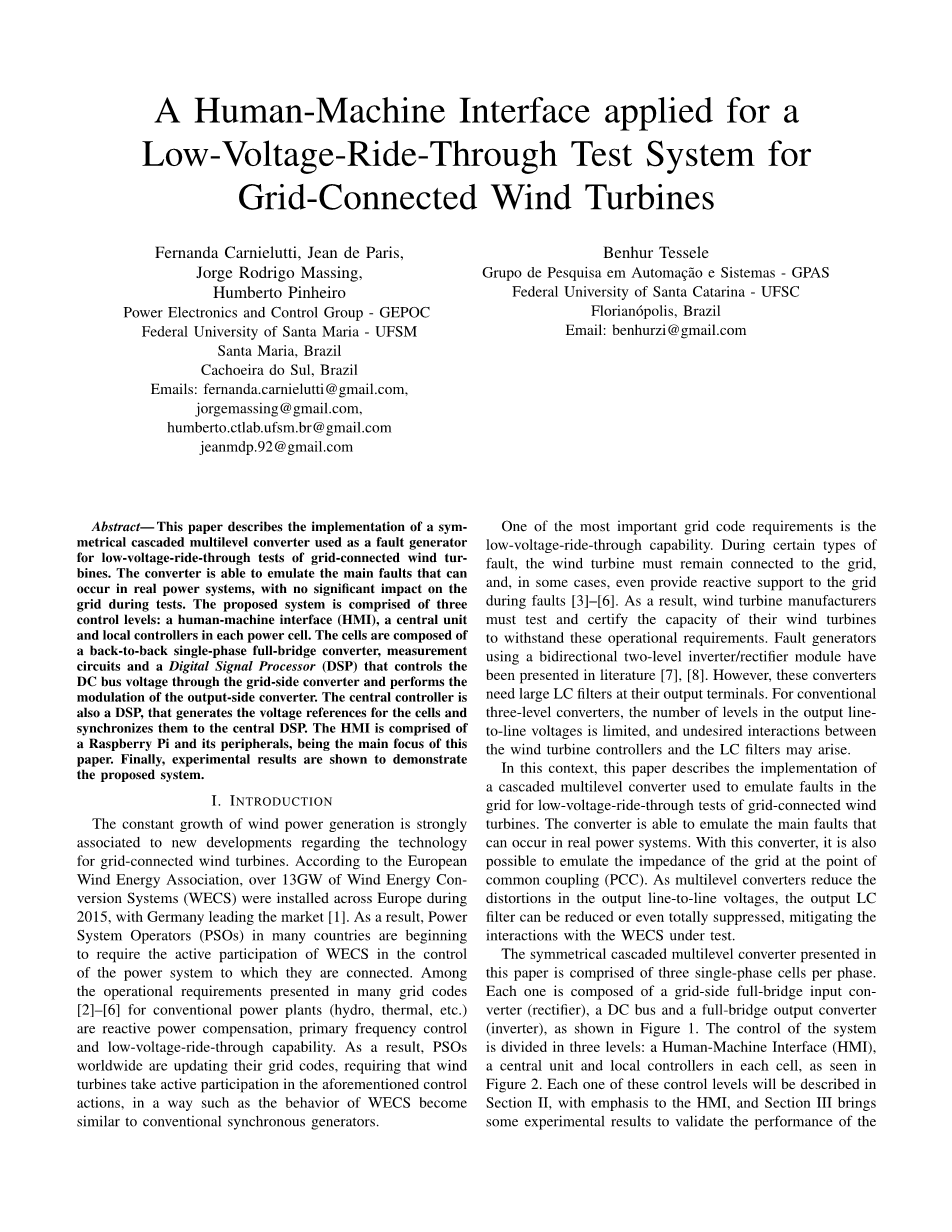
本文提出的对称级联多电平转换器由每相三个单相电池组成。 每个由网格侧全桥输入转换器(整流器),直流母线和全桥输出转换器(逆变器)组成,如图1所示。系统的控制分为三个层次: 人机界面(HMI),每个单元中的中央单元和本地控制器,如图2所示。这些控制级别中的每一个将在第二部分中进行介绍,重点是HMI,第三部分给出了一些实验结果 验证系统的性能。 最后,第四节得出结论。
2.模拟系统的简介
在本节中,详细描述了包括多电平转换器及其控制系统的图2的子系统。
2.1人机界面(HMI)
HMI是最高的控制级别,由硬件平台和嵌入式软件组成。 嵌入式软件开发图形用户界面(GUI),以便用户可以轻松探索其功能,以及用于获取被测风力涡轮机的输出电压和电流的系统。 通过界面,用户可以配置给定测试的参数。 这些参数被发送到多电平转换器的中央控制器,使得转换器可以模拟具有指定特性的电网故障。 在低电压穿越试验期间,数据采集系统存储在风力涡轮机端子处的电压和电流。 结果允许用户在故障之前和之后分析风力涡轮机的行为,并相应地改变WECS控制策略。 下面介绍硬件平台和嵌入式软件。
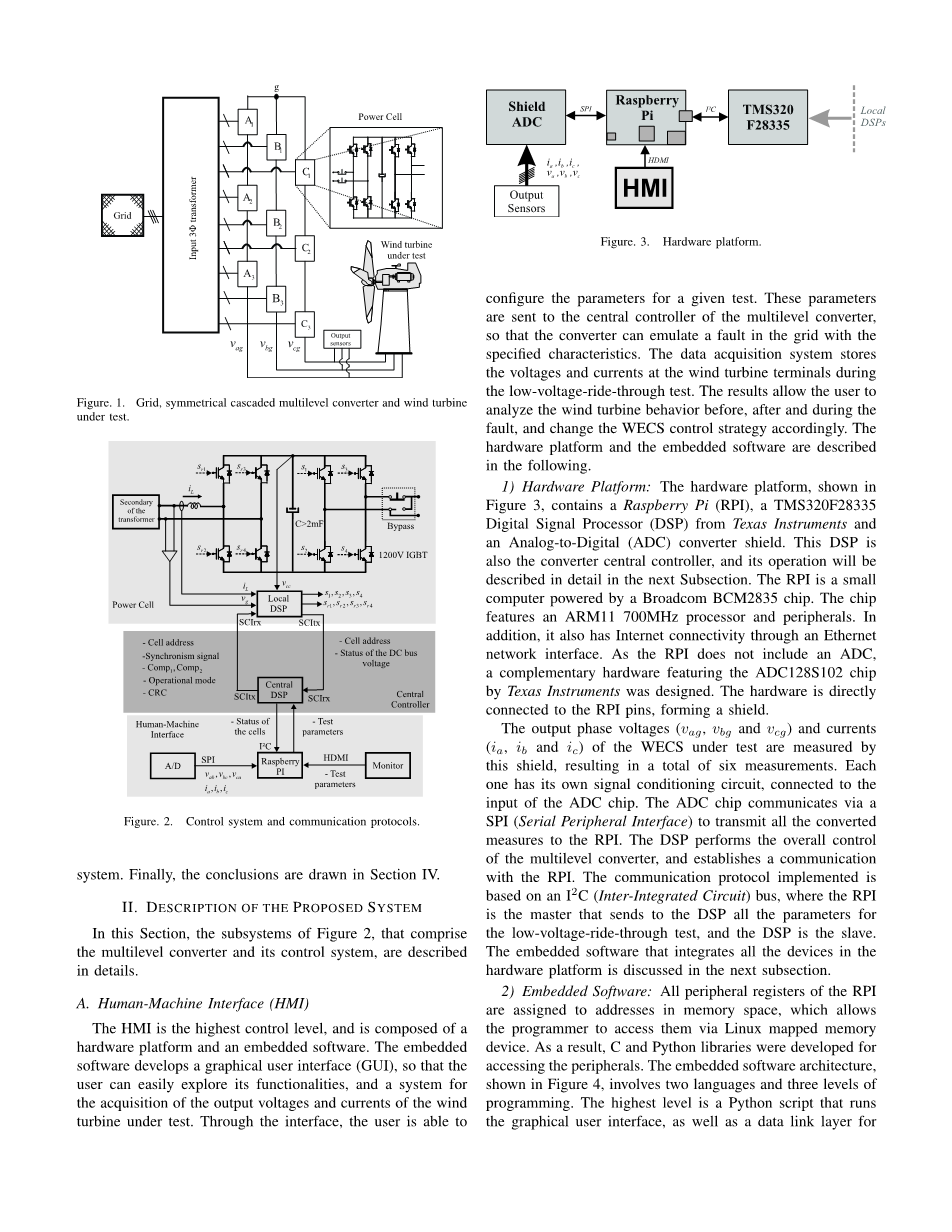
1)硬件平台:如图3所示,硬件平台包含德州仪器的Raspberry Pi(RPI),TMS320F28335数字信号处理器(DSP)和模数(ADC)转换器屏蔽。 该DSP也是转换器中央控制器,其操作将在下一节中详细描述。 RPI是由Broadcom BCM2835芯片供电的小型计算机。 该芯片具有ARM11 700MHz处理器和外设。 此外,它还通过以太网接口连接互联网。 由于RPI不包括ADC,因此设计了德州仪器的ADC128S102芯片的补充硬件。 硬件直接连接到RPI引脚,形成屏蔽。
通过该屏蔽测量被测WECS的输出相电压(vag,vbg和vcg)和电流(ia,ib和ic),总共进行六次测量。 每个都有自己的信号调理电路,连接到ADC芯片的输入。 ADC芯片通过SPI(串行外设接口)进行通信,将所有转换的测量值传送到RPI。 DSP执行多电平转换器的整体控制,并建立与RPI的通信。 实现的通信协议是基于I2C(内部集成电路)总线,其中RPI是向DSP发送低电压穿越测试的所有参数的主器件,而DSP是从机。 集成硬件平台中所有设备的嵌入式软件将在下一小节中进行讨论。
2)嵌入式软件:RPI的所有外设寄存器分配给内存空间中的地址,允许程序员通过Linux映射的存储器访问它们。 因此,C和Python库被开发用于访问外设。 图4所示的嵌入式软件架构涉及两种语言和三级编程。 最高级别是运行图形用户界面的Python脚本,以及I2C总线通信协议的数据链路层。 在中层,C应用程序用于将Python脚本和位于Linux内核空间中的SPI模块进行接。 SPI模块通过串行通信实现与ADC芯片和RPI的接口。
Python脚本启动GUI,从用户接收测试的参数。 参数如表I所示,图5显示了GUI。 一旦设置了参数,用户就可以确认测试。 测试确认事件建立RPI和DSP之间的I2C通信,其中第一个是主机,第二个是从机。 它还将参数存储到数据库中,以便每个测试都有其独特的信息进行进一步分析。 此外,Python软件连接到MySQL数据库管理器,以便存储每个测试的信息。
在I2C通信结束时,Python软件调用C应用程序,传递故障持续时间参数。然后,应用程序将此参数发送到SPI模块并等待数据采集过程结束。 SPI模块返回给C应用程序一个数据缓冲区,包含转换的电压,电流和时间戳。 一旦C应用程序收到数据,它将它存储在数据库中,链接到测试参数。 为了给予灵活性的应用将数据存储在文件中,允许用户绘制存储的数据测试完成后进行分析的波形。
输出电压和电流由ADC采样10KHz的给定期间。 这个时期,定义为t,表示故障持续时间的总和加上一半故障持续时间。 为了捕获电压和电流在故障过渡期间,有必要对其进行采样数据在故障持续时间前后几毫秒。因此,分配半故障持续时间以捕获这些过渡。 由于AD128S102,选择了10kHz的速率时间限制。 每次转换的时间戳是由RPI的1MHz定时器提供。
2.2中央控制器
中央控制器通过一种方式实现德州仪器的TMS320F28335 DSP及其应答可用于整体控制转换器。 它位于在一个PCB主板上与RPI一起,就可以了通过I2C通信引脚进行物理连接。控制算法的流程图如图6所示,并将在以下段落中进行描述。
从RPI接收到的I2C总线参数对于低电压穿越测试,DSP进入模式1的操作,并发送一个命令给所有的单元格,说明他们的整流器必须执行其直流母线的预充电电容器,而逆变器保持禁止。 经过定义预充电期间,如果所有的直流母线电压都达到了设置值,每个单元发回中央DSP一个数据包含其地址和DC的状态的包巴士(收费或不收费)。 如果所有的直流电压都正确,中央DSP将预充电模式(模式1)的操作模式更改为执行测试(模式2)。
中央DSP通过双向光纤通道与小区进行通信。 DSP具有UART(通用异步收发器)类型的三个串行接口,并且每个都用于与给定相位的三个单元进行通讯:与UARTa相位a,带有UARTb的相位b,相位c与UARTC。 来自中央和本地DSP的所有UART设置为2.34MBd的波特率,TMS320F28335允许的速率更快。使用UART FIFO(先进先出)模块发送和接收封装中的字节。
在模式2期间,中央DSP使用[9]的基于载波的几何调制来计算所有单元的逆变器支路的比较器(电压基准)。 中央DSP以12kHz的频率工作,而单元有两个频率:反相器为2kHz,整流器控制直流总线电压为12kHz。 逆变器通过相移策略[10]进行调制,以消除总输出线间电压上的谐波分量。 因此,数据包不会同时发送给给定相位的所有单元,而是延迟,表示相移调制策略的相位角,即在这种情况下为60o,如图 7,其中显示了中央DSP的载波,以及相位a的单元的所有载波。
数据包由六个字节组成:单元的地址,逆变器支路的两个比较器(每个比较器分两个字节发送)和CRC(循环冗余校验),以检查包是否已损坏在转移过程中。 如果在小区接收到包时计算的CRC等于发送的CRC,则信元继续执行DC总线电压的控制和逆变器的调制。 如果CRC不同,则本地DSP等待新包的到来。
当故障穿越测试完成后,中央DSP进入模式3,等待RPI发送具有新测试参数的另一个软件包。 它还发送信元,以抑制其整流器和逆变器,以及RPI,表示测试成功。
2.3本地控制器
每个单元的本地控制器也通过TMS320F28335 DSP实现,负责整流器对直流总线电压的控制和逆变器的PWM调制。 本地DSP位于PCB母板上,如图8所示,其中包括用于光纤通信的电路,用于半导体开关驱动器的PWM信号调节,用于测量和调节电感器电流,DC总线电压和 单元的输入相电压来执行直流母线电压的控制。
如前所述,首先,中央DSP通过UART /光纤通道发送一个消息,使单元进入模式1,并执行直流母线的预充电至设置电压。 在这个预充电期间之后,这些电池向中央DSP发送它们的地址和直流总线的状态; 如果所有的电压都是正确的,DSP会发送一个消息给单元开始执行低电压穿越测试,即运行模式2,并开始发送已经描述的数据包。 当单元接收到六个字节的完整包时,接收UART FIFO产生一个中断; 该单元格检查CRC字节和地址。 如果两者都是正确的,则整流器(12kHz)和逆变器(2kHz)的载波与中央DSP同步,并进行低电压 - 穿通试验。
对于半导体开关s1和s3(s2和s4分别与s1和s3互补),逆变器支路,即比较器的电压基准是Comp1和Comp2。 如上所述,逆变器以2kHz开关,同相的载波相移为60o,以消除总输出线间电压中的谐波分量。
最后,当低电压穿越测试完成时,中央DSP进入模式3,发送消息给小区以抑制它们的整流器和逆变器。 单元和中央DSP进入空闲模式,等待RPI发送新测试的参数。
1)直流母线电压控制:直流母线电压vdc的控制由单元本地DSP进行,采样频率为12kHz。 控制框图如图9所示,其中C是直流母线电容的电容。 与vdc的平方成正比的信号通过离散时间陷波滤波器,设计成可以抑制大约120Hz的频率。 外部电压回路由具有防结束的PI控制器组成,导致控制动作。 测量变压器次级绕组vg的电网电压,并通过两个离散时间二阶低通滤波器获得同步信号。 然后对滤波器的输出进行归一化,得到vgf [11]。 获得当前参考iref,作为upi和vgf的乘法。
内部电流循环通过比例控制器实现,该比例控制器在总控制动作u中转换当前误差eig。最后一个通过调制器,其中它被修改为假定0和TPER之间的值(DSP的载波的最大值),导致整流器半导体开关sr1和sr3(sr2)的比较器Compsr1和Compsr2 和sr4分别与sr1和sr3互补)。
在下一节中,给出了实验结果,以证明所提出的系统的运行。
3. 实验结果
本节提供实验结果,以便在低电压 - 穿透穿透测试中演示系统的性能。 图10显示了中央DSP,HMI和所有转换器单元的实验设置。 这里,示出了两个转换器相(a和b),其中每一个具有每相三个电池。 图11再次显示了转换器,中央DSP和RPI以及HMI。
首先,使用允许验证其性能的环境对HMI进行了测试。 常开继电器由中央DSP驱动。 测试由RPI配置和确认; 然后,向DSP发送1s故障持续时间的故障参数。 DSP接收数据并激活继电器。 另一方面,SPI模块与ADC接口并启动数据采集过程。 根据项目规定,在1s加上500ms的范围内测量负载上的电压和电流。 为了比较和验证所得到的波形,使用示波器捕获相同的电压和电流。在图12(a)和(b)分别示出了所得到的示波器和采样数据波形。
关于转换器的控制和运行,本节介绍了实验结果,仿真了实际电力系统中可能出现的一些类型的故障。 被测设备通过L = 0.9mH和C =15mu;F的LC滤波器连接到多电平转换器的输出端。 电池的直流母线电压调节到100V。 前后故障间隔的调制指数m等于0.9,根据[8]计算故障期间相电压的幅值。 对于这些结果,将单元的直流母线电压的预充电周期定义为5s。 在此间隔之后,如果所有的直流母线都被调节到正确的电压值,则中央DSP激活单元的反相器,并且测试开始执行。 在这里,测试的总持续时间定义为3s,而在这段时间的一半时间内,网格中的故障被仿效,持续1.5s。
图13示出了在执行完整的低电压穿越试验(预制)期间,在变压器的初级绕组处测量的
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137072],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

