
英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
声波和电荷耦合器件图像传感器技术在水下焊缝
跟踪中的应用
Zhang lilingCollege of Mechanical and Electrical Engineering,Nanchang
I nstitute of TechnologyNanchang,
An JiajuCollege of Mechanical and Electrical Engineering,Nanchang
Institute of TechnologyNanchang,
China anjiaju@126.com
Ye jianxiong College of Mechanical andElectrical Engineering,Nanchang
Institute of Technology Nanchang,
China jxlpyjx@163.com
摘要-由于水下环境的复杂性,难以实现自动控制水下焊接,焊接传感器的选择也是一个问题。 根据水下焊接的特殊情况,本文设计了基于一组超声波和CCD传感器的水下焊缝自动跟踪系统。 该系统结合了超声波测距和图形定位功能,为进一步研究水下焊接自动焊缝跟踪奠定了基础。
索引关键词-水下焊接;超声波;CCD; 焊缝自动跟踪
I. 相关介绍
水下焊接技术作为海洋工程建设的关键技术,得到越来越多的关注和应用。 美国,英国,俄罗斯,德国,日本等海洋技术发达国家投入大量资金积极开展。水下焊接相关研究。 中国哈尔滨工业大学,哈尔滨焊接研究所,北京石油化工研究院,华南理工大学,南昌大学等也研究了水下焊接。 传感器的应用是实现自动化的先决条件; 这也是当前水下焊接研究的热点和难点问题,由于具有特殊的水下环境,大大降低了可选传感器的选择范围。 目前国内外传感器的主要选择是CCD传感器; 也报道了旋转电弧传感器。
鉴于目前的研究现状,本文提出超声波传感器和CCD传感器将一次性应用于水下焊接。 水下高精度超声波用于焊接工件表面的位置特性; CCD传感器用于检测工件表面图像。 在V型焊接识别和焊缝跟踪控制方法的两个方面进行技术研究,我们将实现水下缝合跟踪,推动实现自动焊接的新途径。
超声波传感器具有成本低,安装方便的优点,广泛应用于测量,压力测量,流量/流速测量等领域。 另外,由于具有良好的方向,定向传输和调制,抗干扰能力的优点,上个世纪九十年代以来,人们开始研究超声波传感器在缝跟踪中的应用。 激光辅助CCD摄像机可以直接获得焊池图像,通过提取焊池信息获取更准确的位置信息,是国内外焊接自动跟踪研究的常用方法。
II. 控制原理
- 超声波测距的原理
超声波是一种机械波,它不仅可以在气体中扩散,而且可以传播液体和固体。 超声波在相同的介质中具有相同的速度,也就是说超声速度不随频率变化而变化。 超声波与材料的相互作用,与超声波特性密切相关。 超声波是无害的检测手段来研究材料。 它还具有改变材料的能量,所以超声波范围已被广泛应用于工业,农业,科学研究方面。
超声波距离测量方法有多种,如相位检测,声振检测,TOF(飞行时间)检测等。定相检测方法检测精度高,范围有限。 声振幅检测方法易受干扰; TOF检测方法,原理简单,电路简单,目前较为流行和实用。 因此,我们在我们的缝线跟踪系统中采用超声TOF检测方法。受强电脉冲信号的启发,超声波向外传播。 在超声波遇到物体后会形成回波。 然后超声波传感器接收回声。 根据从发射到接收的时间,我们可以确定传感器与目标之间的距离。 超声波测距原理如图1所示。
距离公式为:
L = 1/2 c·t
其中c表示超声速度; t表示飞行时间。
超声波最大检测距离与超声波传感器的发射功率和放大有关。 传输功率和放大倍数越高,接收电路的灵敏度越高,检测距离越远。 超声波在水中的传播速度与温度有很大的关系。 为了提高测量精度,需要进行温度补偿。
B. CCD视觉控制原理
焊接过程的跟踪控制方法是:将CCD传感器安装在焊枪前面,以获得焊缝和原始焊池图像。 计算机识别焊缝,并比较焊缝与焊炬之间的位置距离。 作为焊缝偏差,距离可用于焊缝跟踪。 然后将A / D数据采集卡插入总线。 计算机控制电压将从该卡输出,用于控制焊接过程。
III. 研究内容
- 系统设计
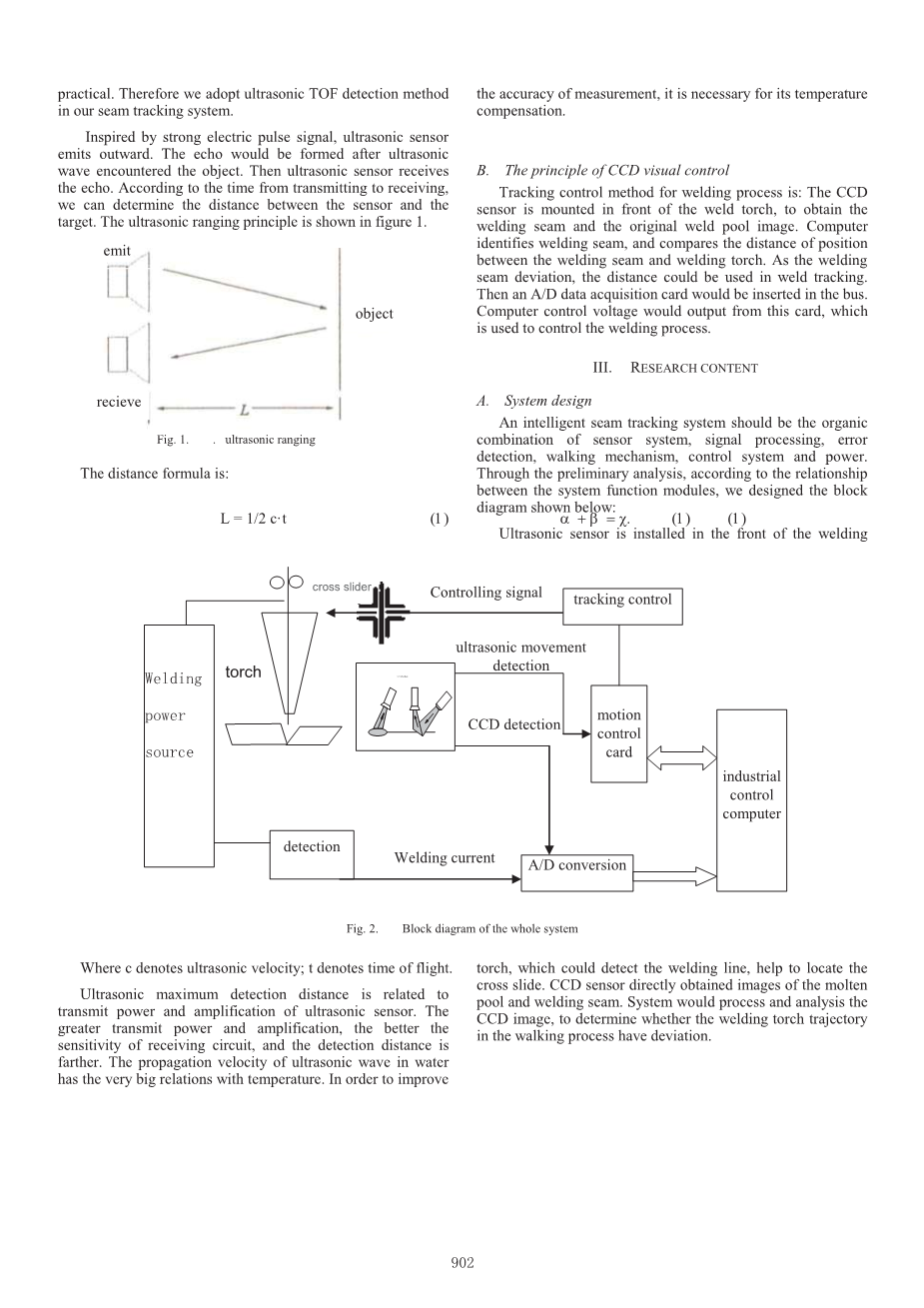
智能焊缝跟踪系统应该是传感器系统的有机组合,信号处理,误差检测,行走机制,控制系统和电源。通过初步分析,根据系统功能模块之间的关系,我们设计了如下图所示的方框图:
alpha; beta;=chi; (1)
超声波传感器安装在焊机前部,可以检测焊接线,有助于定位交叉滑轨。 CCD传感器直接获得熔池和焊缝的图像。 系统将对CCD图像进行处理和分析,以确定步进过程中的焊炬轨迹是否有偏差。
- 传感器设计
超声波距离测量系统由超声波传感器,超声波发射电路,超声波接收电路和工业PC等组成。超声波传感器的性能将直接影响超声波传感器的频率为2MHz,操作超声波测距电路。 该系统采用压电超声波传感器DYA-2M-01E。 超声波传感器的中心频率为2MHz,工作温度为-20℃,最大输入电压为400V,满足焊接工艺使用范围的要求。我们的设计采用高精度滑动,可用于水下,因此可以使用 线性扫描。 该系统在1000mm范围内的测量精度可达到5mm。
- 信号采集和分析
·超声信号采集方法设置为固定长度数据采样。 采样频率为10MHz。 当焊炬高度约为250mm时,每个样品为5000.图3显示了激励开始回波的完整波形。 从图中可以看出:当激励发生时,传感器可以立即接收到激励波,随时间而快速下降。 当回波到达时,检测信号波浪突然增加,然后振荡波形迅速下降。 如果传感器可以正确接收到回波,则会在完整波形中出现两个峰值。 这意味着可以检测到焊缝。
·由于缺乏水下光源,激光器被用作水下CCD焊接图像采集的光源。 水下捕获的CCD图像会产生很大的噪音。 通过充分利用图像分析技术,如灰度级变换或直方图均衡,可以在不同的浊度下确定影像增强的有效方案。
·图像增强处理后,基本消除了CCD图像的噪声。 线性或非线性时频信号分析方法,如中值,数学形态和小波变换,被广泛用于处理传感器收集的信号,因此得到焊枪相对于V型中心线的位置误差信息。
·根据超声波和CCD一起收集的有效信息,建立了跟踪控制系统的动态数学模型。 虽然充分考虑了超声波传感器前端引起的延迟误差,但我们设计了控制算法,以满足控制系统的要求。
IV. 结论
通过对焊接过程跟踪控制的研究和试验,得出以下结论:
·我们设计了焊接自动跟踪系统的超声波和CCD双重感测结构。 超声波发射和接收电路简单,稳定,可以完全满足预防措施的需要,为进一步研究焊接自动化控制奠定了坚实的基础。
·我们在自动水下焊接系统中采用超声波传感器的线性扫描方法。基于此方法,我们分析了焊炬偏差决策方法,设计了可行的控制策略。 超声波和CCD信息的信息融合被充分利用以获得实时误差,从而提高焊缝跟踪系统的快速性,稳定性和准确性。
参考文献
[1] Wu Shen-shan, Nie Hui-juan, Wu Dong-fang and Fu Hui-kai. The design of intelligent ultrasonic distance-measuring system[J]. Journal of Henan Normal University (Natural Science), 2007, Vol.35 No.2: 86-88.
[2] Richard Lan M, Woodward Neil J and John Billingham. Deepwaterwelding foinstallation and repair—A viable technology. 2002, pp.68- 73.
[3] Tuo Chao-yong, Wang Ji-chan and Bu Ying-yong. Study on sub aqueous ultrasonic distance measure system based on PC platform[J], Instrument Technique and Sensor, pp. 91-93. Apr. 2008.
[4] ]Xu Peiquan, Tang Xinhua and Li Lina et al. A visual sensing roboticseam tracking system, Journal of Shanghai Jiaotong University, pp.35- 40, January 2008
[5] Matsui S., Goktug G., Slit laser sensor guided real-time seam tracking arc welding robot system for non-uniform joint gaps[A], IEEEInternational Conference, pp.159 – 162, Dec. 2002.
[6] He Yinsui, Zhang Hua. Recognition of no arc V-shape weld seamunderwater. Welding amp;Joining, pp.39-43, Feb. 2006.
[7] Shuang Yuanqing, Chen Wuzhu and Wang Kangjian et al. Vision system for closed-loop control of the penetration in laser-MIG hybrid welding. J Tsinghua Univ(Sci amp; Tech), pp.1891-1894, Nov. 2008.
[8] Zhang Chen Shu, Y E J Ian Bear. Application of ultrasonic int and seam tracking. Welding technology PP.1-3, Apr. 2009.
[9] NI Wei-ning ZHU Zu-yang ZHANG Wei et al. High-precision Ultrasonic Measurement System for Micro-Distance [J]. Instrument Technique and Sensor, pp.75-76, 92. Jan. 2014.
声波和电荷耦合器件图像传感器技术在水下焊缝跟踪中的应用
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[27907],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

