
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
毕业论文(翻译)
题 目 骨骼医疗诊断边缘检测在MATLAB
的实现
原 题 Implementing Edge Detection for Medical Diagnosis of a Bone in Matlab
骨骼医疗诊断边缘检测在MATLAB中的实现
Madhulika, Divakar Yadav, Pritee Gupta, Gurpreet Kaur
Mallika Gandhi, Ajeet Singh
摘要:图像的边缘被认为是可以通过应用不同方法的检测器来提取的一种关键信息。 边缘检测是计算机视觉和图像处理中的一个基本和重要课题在本文中,我们讨论了在边缘特征提取中应用的几种数字图像处理技术。 首先,完成图像的线性滤波,用于从收集的图像中去除噪声。 其次,对Sobel,Log边缘检测,Canny边缘检测等边缘检测算法进行了分析,然后根据仿真结果比较了边缘检测算子的优缺点。 可以看出,canny算子可以获得更好的边缘特征。 最后,应用边缘检测来发现手骨的裂缝。 实验后,本文提出的边缘检测方法是可行的。
关键词:滤波器,Sobel,Log,Canny,失真。
1 引言
边缘检测是一种图像分割技术,它决定图像中边缘或线条的存在,并以适当的方式概述它们,也是一种无法完全解决的问题[1]。 边缘是灰色具有阶梯变化和屋顶变化的那些像素的集合,它存在于对象和背景,对象和对象,区域和区域之间以及元素和元素之间。 边缘总是留在具有不同灰度级的两个相邻区域中。 这是灰度不连续的结果。 基于范围非连续性的边缘检测。图像边缘检测是图像处理和分析的基础内容之一,也是迄今为止无法完全解决的一个问题[2]。当获取图像时,产生诸如投影,混合,异常和噪声的因素。这些因素带来了图像特征的模糊和失真,因此很难提取图像特征。此外,由于这些因素,也难以检测边缘。
图像边缘和轮廓特征的检测和提取方法已经在图像处理和分析技术领域进行了研究。边缘特征提取广泛应用于许多领域。本文主要讨论了几个边缘检测算子,并应用于具有裂缝的骨骼的医学诊断中。首先,对所获取的图像进行滤波和去噪。在去噪过程中,使用线性滤波器。然后应用不同的运算符来检测边缘,包括Sobel运算符,Log运算符,Canny运算符。最后应用边缘检测来找到一些裂纹。
2 图片加载
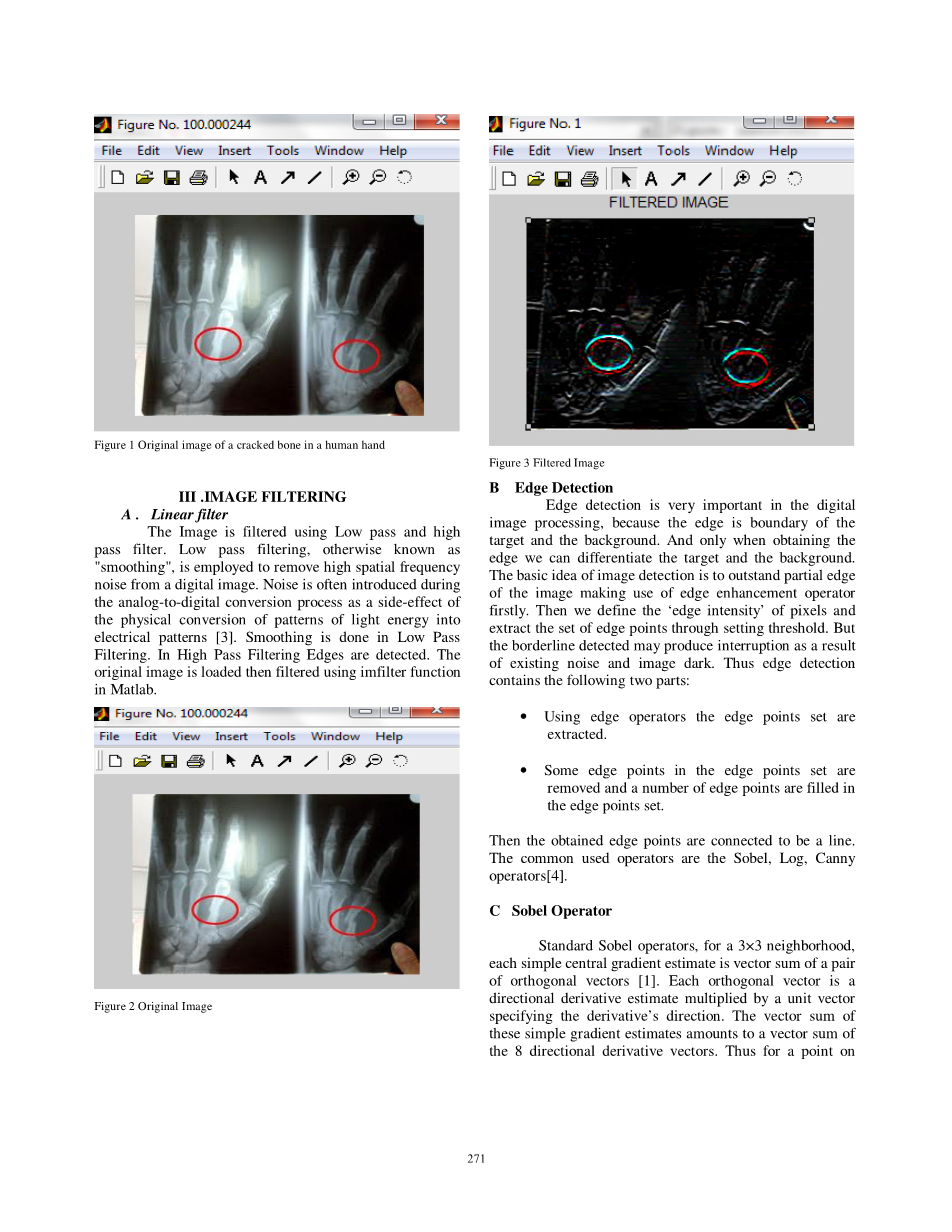
图像信息通过使用GUIDE工具开发的GUI加载到Matlab中。 使用加载模块加载骨骼的原始图像。加载的图片如图1所示:
图1人类手中裂纹骨的原始图像
3 扫描过滤
3.1线性滤波器
使用低通和高通滤波器对图像进行滤波。 采用低通滤波(也称为“平滑”)来从数字图像中去除高空间频率噪声。 噪声通常在模数转换过程中被引入,作为将光能模式物理转换成电气模式的副作用[3]。 平滑在低通滤波中完成。 检测到高通滤波边。 原始图像被加载,然后使用imfilter函数在Matlab中过滤。原始图像如图2所示,滤波后的图像如图3所示。
图2 原始图像
图3 滤波后的图像
3.2 边缘检测
边缘检测在数字图像处理中非常重要,因为边缘是目标和背景的边界。 只有获得边缘,我们才能区分目标和背景。 图像检测的基本思想是首先利用边缘增强算子来展现图像的局部边缘。 然后我们定义像素的“边缘强度”,并通过设置阈值提取边缘点集合。 但检测到的边界可能由于现有噪声和图像暗影而产生中断。 因此,边缘检测包含以下两部分:
- 使用边缘算子,提取边缘点集。
- 边缘点集中的某些边缘点被删除,并且边缘点集中填充了多个边缘点。
然后将获得的边缘点连接成一行。 常用的运算符是Sobel,Log,Canny运算符[4]。
3.3 Sobel算子
标准Sobel算子,对于3times;3邻域,每个简单的中心梯度估计是一对正交向量[1]的向量和。 每个正交向量是方向导数估计乘以指定导数方向的单位向量。 这些简单梯度估计的向量和相当于8个方向导数向量的向量和。 因此一点笛卡尔网格及其八个具有密度值的邻居如图4所示:
图4 笛卡尔网络
定向导数估计向量G被定义为密度差除以到邻居的距离。 确定该向量使得G的方向由单位向量给予近似邻域。 注意,邻居组成对象对:(a,i),(b,h),(c,g),(f,d)。 该梯度估计的向量和如公式1所示:
(1)
在公式1中,R的值为,则公式1可化简如公式2所示:
(2)
这里,由于将除数除以2,所以该向量乘以2。所得到的公式如3所示:
(3)
通过使用上述矢量获得了x和y分量的以下加权函数,如表1所示。
表1 Sobel操作模板
边缘检测结果如图5和图6所示:
图5有裂纹骨
图6 Crackc检测到阈值0.041000
3.4Log算子
Log运算符是线性和时变运算符。 它通过搜索图像灰度级中二阶微分系数为零的斑点来检测边缘点。 对于连续函数f(x,y),Log运算符定义在点x,y处:
(4)
Log操作符是对图像的微分系数进行滤波和计数的过程。 它使用旋转对称的Log模板和图像的卷积来确定滤波器输出的零重叠位置。 Log操作符的模板如表2所示:
表2 Log操作模板
在Log算子的检测过程中,我们首先用高斯低通滤波器对图像进行预平滑,然后使用Log算子找到图像中的陡边。 最后,我们进行零灰度二值化,生成封闭的,连接的轮廓,并消除所有的内部斑点。 但是,双像素边界通常会使用Log运算符来检测边缘,并且运算符对噪声非常敏感。 因此,Log操作符通常用于判断边缘像素位于图像的亮部分或暗部分。检测结果如图7所示:
图7 用Log算子骨缝检测图
3.5 Canny滤波
Canny操作符是一种新的边缘检测算子。 检测边缘性能好,应用广泛。 Canny操作符边缘检测是搜索图像渐变的部分最大值。 梯度由高斯滤波器的导数计算。 Canny算子使用两个阈值分别检测强边和弱边。 只有当强边缘与弱边缘连接时,弱边将包含在输出值中[8]。方程式的运算符的理论基础如下。
高斯公式:
(5)
边缘正常值:
(6)
边缘强度:
(7)
最大强度:
(8)
Canny滤波的优势:
该方法不易受噪声干扰,可以保持噪声和边缘检测之间的良好平衡。 它可以检测真实的弱边。
3.6模拟结果分析
为了了解这些边缘检测算子的优缺点,我们分别使用这些不同的算子来检测边缘。 仿真结果如图8所示。
图8 原始有裂纹骨图像
图9 灰度直方图
图10 Sobel检测图(阈值0.036)
图11 Log滤波检测图(阈值0.085)
图12 Canny检测图(阈值0.105)
4 比较分析
|
滤波算法 |
|
|
Sobel |
逐行应用3x3卷积滤镜,以确定周围像素的渐变。 像素是一个边缘的成员,如果它的强度大于其周围像素的成员。 |
|
Canny |
1986年,Canny推出了一款操作器作为理想的边缘检测方法。 Canny的操作者通过查找图像的梯度的局部最大值来检测边缘。 在这种方法中,高斯滤波器的导数用于梯度。 |
|
Log |
高斯拉普拉斯算子(LOG)的运算符和零交叉检测边缘,分别用拉普拉斯高斯滤波器和特定滤波器滤除原始图像后的零交叉。 |
表3 各类算法比较
参考文献
[1] W. Frei and C. Chen, 'Fast Boundary Detection: A Generalization and New Algorithm,' IEEE Trans. Computers, vol. C-26, no. 10, pp. 988-998, Oct. 1977.
[2} Kotsia, I. Pitas, I., 'Facial Expression Recognition in Image Sequences Using Geometric Deformation Features and Support Vector Machines'.. IEEE Trans, Image Processing, vol. 16, NO. 1, Jan. 2007
[3]http://www.cs.washington.edu/research/metip/tutor/tutor.Filtering.html.
[4] Ziou, D. and Tabbone, S.: Edge Detection Techniques An Overview, International Journal of Pattern Recognition and Image Analysis, 8(4):537--559, 1998
[5] Ziou, D. and Tabbone, S.: Edge Detection Techniques An Overview, International Journal of Pattern Recognition and Image Analysis, 8(4):537--559, 1998
[6] Feng-ying Cui and Li-jun Zou,” Edge Feature Extraction Based on Digital Image Processing Techniques” Proceedings of the IEEE International Conference on Automation and Logistics Qingdao, China September 2008.
[7] SOBEL, I., An Isotropic 3times;3 Gradient Operator, Machine Vision for Three – Dimensional Scenes, Freeman, H., Academic Pres, NY, 376-379, 1990.
[8] Ma Yan, and Zhang Zhihui, Several edge detection operators comparation, Industry and mining automation, 2004, (1): 54-56.
[9] Canny, J., A Computational Approach To Edge Detection, IEEE Trans. Pattern Analysis and Machine Intelligence, 8:679-714, 1986.
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[27229],资料为PDF文档或Word文档,PDF文档可免费转换为Word
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

