英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
户外结合立体视觉RFID和BLE的人体识别
收稿日期:2016年11月10日/接受日期:2017年1月26日/在线发布时间:2017年2月9日
copy;Springer Science Business Media纽约2017
摘要:通过射频识别技术可以增强室外环境中基于视觉 的人员定位系统。这种组合有可能实现广泛的新应用。当个人佩戴射频标签时,他们可能被识别和本地化。
以这种方式,该技术可以以个性化方式与个体交互。在本文中,两种射频识别技术,UHF射频识别(RFID) 和蓝牙低功耗(BLE),与基于立体声的人体检测系统相结合,可识别中等面积复杂户外场景中的个体。 20 米所提出的方法在人行横道上得到验证,行人穿着便携式RFID无源标签和有源BLE信标。
关键词:人体识别,传感器融合,户外活动,ble
1 介绍
智能系统本地化和识别个人或特定对象的能力是一个非常重要的特征,有可能实现广泛的新应用。通过这种方式,系统可以以个性化的方式与个体交互,或者可以获得诸如车辆,堆积产品,行李箱等甚至动物的物体的非常详细的信息,这些物体并行地被定位在一个特定的场景。识别个人并不一定意味着管理个人信息,但任何可能对应用感兴趣的变量,如辅助智能交通系统的残疾类型[11然而,在需要快速且非侵入式定位和识别用户,动物或物体的室外和动态环境中, 这变得尤其具有挑战性。
基于视觉(单眼或立体),结构光,雷达或激光雷 达的物体检测系统能够精确地确定物体在其视野中的 位置。然而,为了确定它们的特异性(例如,它们是谁,它们具有什么类型的残疾,它们的获取水平是什么,它是什么类型的动物,什么类型的车辆 - 制造,模型,排放等等 - 它是,行李箱等的目的地仍然是一个开放的研究挑战,特别适用于中型地区的户外应用。
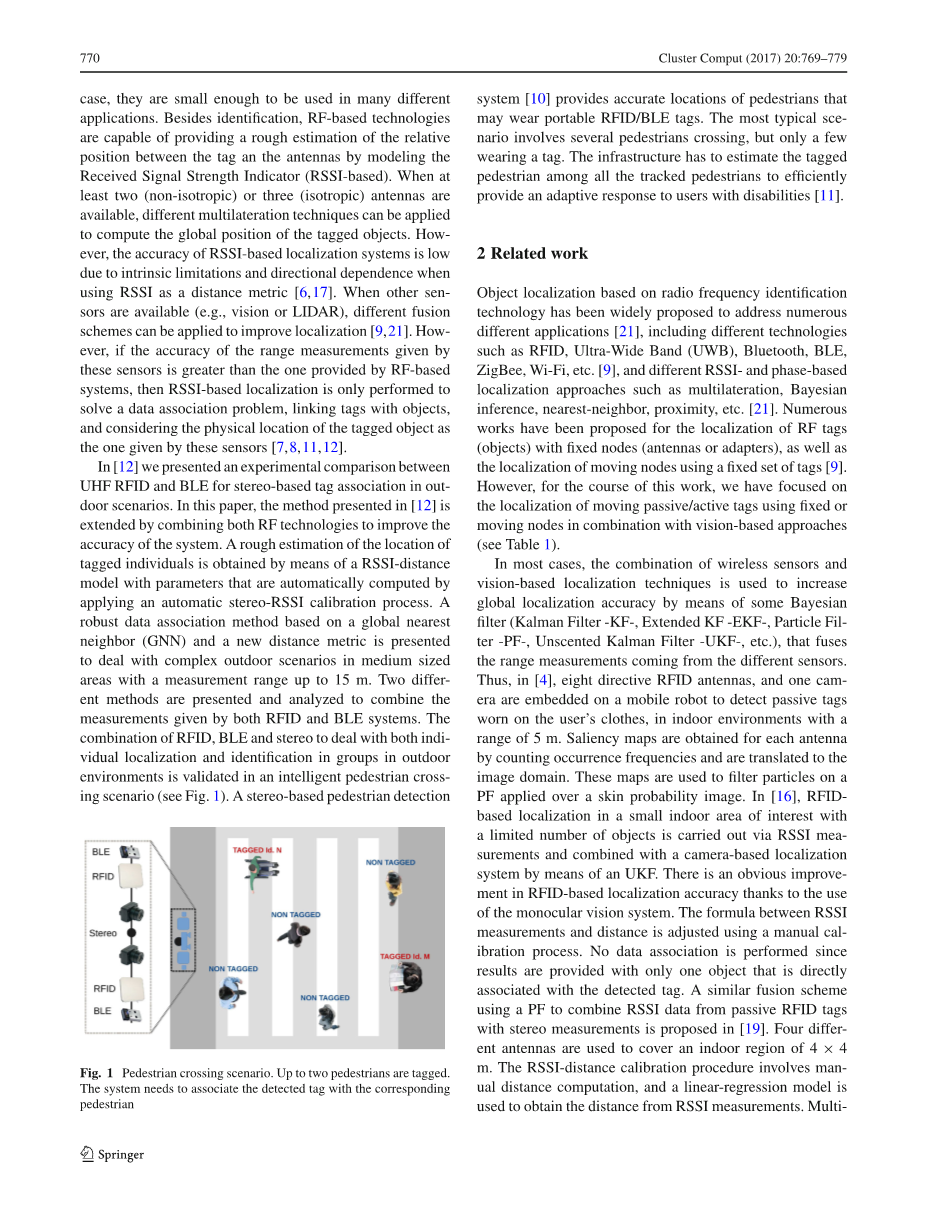
将基于射频的(RF)无线通信与基于视觉,雷达或LIDAR的对象检测方法结合使用可以是为系统提供定位和识别组中的个体或对象的能力的解决方案。射频识别在各种应用中取得了广泛的成功,包括资产跟踪, 高速公路收费,供应链管理,动物识别,监控系统, 航空航天等。13,15].更具体地说,无源超高频(UHF) RFID技术由于不需要标签中的内置电源而引起了业界和学术界的极大关注。由于使用从标签到阅读器的反向散射耦合,无源标签可以与阅读器通信。诸如BLE(或蓝牙智能)之类的有源技术以降低的功耗和最低成本提供高通信范围。虽然有动力的活动信标1 在这需要它们很小,可以用在许多不同的应用中。除了识别之外, 基于RF的技术能够通过对接收信号强度指示器(基于RSSI的)建模来粗略估计标签与天线之间的相 对位置。当至少两个(非各向同性)或三个(各向同性)天线可用时,可以应用不同的多点定位技术来计算标记对象的全局位置。然而,当使用RSSI作为距离 度量时,由于内在限制和方向依赖性,基于RSSI的定 位系统的准确性较低[6,17].当其他传感器可用时(例 如,视觉或激光雷达),可以应用不同的融合方案来 改善定位[9,21].但是,如果这些传感器给出的距离测 量精度大于基于RF的系统提供的距离,则只执行基于RSSI的定位以解决数据关联问题,将标签与对象链接, 并考虑物理位置标记对象的标记为这些传感器给出的 对象[7,8,11,12].在[12我们提出了UHF RFID和BLE之间的实验比较, 用于室外场景中基于立体声的标签关联。在本文中, 方法[12通过结合两种RF技术来扩展,以提高系统的准 确性。通过RSSI-距离模型获得对标记个体的位置的粗 略估计,该RSSI-距离模型具有通过应用自动立体声RSSI校准过程自动计算的参数。提出了一种基于全局 最近邻居(GNN)和新距离度量的鲁棒数据关联方法,以处理中等大小区域中复杂的室外场景,测量范围可达15米。提出并分析了两种不同的方法,以结合RFID 和BLE系统给出的测量结果。RFID,BLE和立体声相结 合,可以在室外环境中分组处理个人定位和识别,并 在智能人行横道场景中得到验证(见图2)。1).基于 立体声的行人检测系统[10]提供可能佩戴便携式RFID / BLE标签的行人的准确位置。最典型的情况是几个行人穿越,但只有少数人穿着标签。基础设施必须估计所有被跟踪行人中被标记的行人,以便有效地为残疾用户提供适应性响应[11].
图1人行横道情景。最多两名行人被贴上标签。系统需要将检测到的标签与相应的行人相关联
2 相关工作
基于射频识别技术的目标定位已被广泛提出以解决许 多不同的应用[21],包括RFID,超宽带(UWB),蓝牙, BLE,ZigBee,Wi-Fi等不同技术[9],以及不同的RSSI 和基于阶段的定位方法,如多点定位,贝叶斯推理, 最近邻,邻近等[21].已经提出了许多关于具有固定节 点(天线或适配器)的RF标签(对象)的定位的工作, 以及使用固定标签集的移动节点的定位[9].然而,在 这项工作的过程中,我们专注于使用固定或移动节点 结合基于视觉的方法移动被动/有源标签的本地化(见 表1).
在大多数情况下,无线传感器和基于视觉的定位技术的结合用于通过一些贝叶斯滤波器(卡尔曼滤波器- KF-,扩展KF -EKF-,粒子滤波器-PF-,无味卡尔曼滤波器)来提高全局定位精度-UKF-等),融合了来自不同传感器的测量范围。因此,在[4],8个指令RFID天线和一个摄像头嵌入移动机器人中,以检测佩戴在用户衣服上的无源标签,在5米范围内的室内环境中。通过计算出现频率为每个天线获得显着性图并将其转换到图像域。这些图用于过滤在皮肤概率图像上应用的PF上的粒子。在[在[16],通过RSSI测量并通过UKF与基于摄像机的定位系统相结合,在有限数量的物体的小型室内区域中进行基于RFID的定位。由于使用单目视觉系统,基于RFID的定位精度有明显改善。使用手动校准过程调整RSSI测量和距离之间的公式。不执行数据关联,因为结果仅提供有与检测到的标签直接关联的一个对象。[P]中提出了一种类似的融合方案,使用PF将来自无源RFID标签的RSSI数据与立体测量相结合[19].四个不同的天线用于覆盖4 4的室内区域m.RSSI距离校准过程涉及手动距离计算,并且线性回归模型用于获得RSSI测量的距离。多延迟用于执行基于RSSI的定位。同样,没有应用数据关联,因为只考虑了一个对象。PF也适用于[14]在室外场景中融合Wi-Fi和视觉测量。所谓的指纹(不同节点的SSID和RSSI)和GPS用于执行RSSI距离校准。GPS 仅用于校准,当没有可用的差分校正时,其精度受到限制。使用所有接入点的质心位置进行基于RSSI的定位。数据关联不适用,因为结果仅使用一个人获得。
在[[...]中提出了动态RSSI距离校准过程。3]在目标周围使用线性局部模型,在室内环境中使用扩展信息过滤器(EIF)结合RSSI和视觉测量。尽管动态RSSI 模型提高了定位精度,但其使用仅限于单对象单标签方案。在具有多个目标的真实场景中,将完美的数据关联需要。在[[...]中提出了房间级精度系统18],通过RSSI室校准过程和视频跟踪系统,能够检测进入或离开房间的个人。然后应用三边测量来解决房间级本地化问题。结果仅提供一名候选人;因此,不应用数据关联过程。
我们可以观察到,并且[5]和[11],文献中忽略了对 象或blob和标签之间数据关联的问题,这限制了对真 实场景的适用性。在[在[5],提出了一种概率框架, 将RFID和单眼视觉测量结合起来,用于有限范围内的 室内场景。预定义和手动网格用于执行RSSI距离校准, 使用高斯分布对每个网格位置建模。基于RSSI的定位 通过高斯混合来解决,其中每个模式对应于一个RFID 天线。隐马尔可夫模型(HMM)最终应用于使用高斯分布作为度量来处理数据关联问题,并最终组合RSSI和视觉测量以计算人/标签最终位置。在[在[2建议使用仅使用一个天线的混合Kinect深度摄像机和RFID系统来确定两个人中哪一个站在交互式显示器的左侧和右侧。在[提议]中提出了扩展版本8]使用反向合成孔径技术(SAR)识别在室内场景中最多5 米的群体中的个体。训练支持向量机(SVM)以关联RSSI和相位参数的变化,因为标签在空间中移动到深度相机所看到的个体的运动。该系统能够在4秒内确定移动个体的身份,并且能够在7秒内确定5个人的移动群体,其准确度大于95%,但仅限于室内场景。
正如几项研究所表明的[6,17],就定位目的的精度 和稳定性而言,使用RSSI作为距离度量时存在内在局 限性。因此,如[在7],我们建议使用RFID / BLE系统作为识别工具(残疾类型),并使用视觉系统(立体声)进行本地化。这样,数据融合问题可能变成简单的数据关联问题。提出了一种具有新颖距离度量的全局最近邻算法,用于将射频标签与立体对象(行人) 链接起来。我们的RSSI距离校准过程是全自动的。该 系统设计用于室外场景(人行横道),中等大小的区域,测量范围高达20米,这是对现有技术的明显贡献。我们之前研究的目标[12]是在室外场景中提供RFID和BLE技术之间的具体比较。在本文中,我们通过开发和 分析两种新方法来融合这一主题,以便在室外场景中 融合这两种技术。
表1基于RF和视觉的个人定位和识别方法
|
出版物和年份 |
传感器配置 - 重 |
方案类型和范围 (m) |
RF的定位记 |
# taggeded/未标 |
射频视觉,数据关联 |
|
刑 |
个人 |
||||
|
Miyaki等。[14] |
Wi-Fi,单眼 |
室外,20asymp;米 |
rssi-g |
1/1 |
PF RSSI视觉融合,无数 |
|
校准 |
据关联 |
||||
|
Germa等。[4] |
RFID , 8 个天线, |
室内,5asymp;米 |
天线电平频 |
1/1 |
PF天线 - 视觉,融合, |
|
单眼 |
率,计数 |
无数据关联 |
|||
|
Isasi等人。[7] |
RFID , 3 个天线, 单眼 |
室内,房间 等级asymp;5-10米 |
标签检测(无本地化) |
1/1 |
视觉定位,RFID检测, 无数据 |
|
asymp; |
协会 |
||||
|
尼克等人。[16] |
RFID,1个天线, |
室内,3米 |
RSSI距离手册 |
1/1 |
UKF RSSI视觉融合,没 |
|
单眼 |
校准 |
有数据关联 |
|||
|
Bernabe等。[3] |
RFID, 1 个天线, 单眼 |
室内,节点水平asymp;2-4米 |
RSSI单眼自动校准 |
1/1 |
EIF RSSI视觉融合,无数据关联 |
|
Cafaro等。[2] |
RFID, 2.5D 深度, |
室内, asymp; 1–2 m |
RSSI单眼 |
2/2 |
概率过滤RSSI视觉, |
|
(Kinect) |
自动校准 |
数据 |
|||
|
协会(左右) |
|||||
|
Schwiegelsho |
RFID , 4 个天线, |
室内, asymp; 4–6 m |
RSSI距离 |
1/1 |
PF RSSI-立体声融合没 |
|
n等人。[19] |
立体声lt; 剩余内容已隐藏,支付完成后下载完整资料 资料编号:[20524],资料为PDF文档或Word文档,PDF文档可免费转换为Word |
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

