英语原文共 11 页
绕弯道行驶时驾驶员的眼睛移动特性分析
摘要
为了研究驾驶员视觉策略和注视点的分布,人们做了大量的工作并得出了显著的结论。然而,对于什么是注视目标以及注视点的功能性意义还没有达成共识。为了完善这方面的理论,本研究对驾驶员的视觉特征进行了研究。进行了道路试验,记录了驾驶员在左右曲线行驶时的眼球运动和车辆行驶参数。结果表明,驾驶员的注视方向围绕参考轴波动,注视点分布在水平注视位置的中心区域,而不是地理意义上的某一特定点。考虑到中国的交通规则,我们在这里建议司机们不要把注意力集中在某一点上。任何可以指示弯曲曲率的点或位置都可以是所谓的目标点,司机只是想操纵他们的车辆,以便以舒适和省力的方式安全通过弯道。
1.导言
道路、交通和环境信息是汽车安全驾驶所必需的。为了正确地驾驶汽车,驾驶员需要获取、处理和利用外部信息。统计分析证明,约80%的驾驶信息是通过视觉观察获得的[1]。因此,驾驶员操纵速度和方向的视觉线索,以及如何寻找注视目标,对于建立和预测在自然驾驶任务中执行的眼睛运动变化趋势,以及理解驾驶行为,具有重要意义 ,
几十年来,人们做了大量的工作,用真实和模拟的方法来研究驾驶员在自然任务中的视觉特征[2-8]。弯道行驶时的视觉策略和注视点的分布是研究最广泛的方面之一。由于研究对象的注视行为在空间和时间上都与任务条件密切相关,因此很难推导出一个在任何情况下都适用的完美理论或模型[6-8]。
到目前为止,已经提出了三种主要的驾驶员眼动模型。切点假设是第一个被提出来的,也是迄今为止最流行的[9-12]。切点是驾驶员视野中明显与内车道边缘或路肩的视觉方向相反的点。研究人员认为,道路线形和曲率信息可以通过这一临界点显示出来,驾驶员将依赖这一信息来控制车辆的转向。根据转向角反馈,将切点模型划分为切点定位模型和切点定向模型。在前者中,驾驶员将目光集中在切点上,利用切点相对于运动轴的视角来判断弯道的曲率。该模型没有对驾驶员的转向行为进行具体的预测。在后一种模型中,驾驶员将视线固定在切点上,并主动转向,使切点的视角保持在一个恒定的水平方向上。
第二类模型假设,在行驶曲线时,注视目标是未来道路上的点,是驾驶员打算通过的路面的一部分[13-19]。这些点接近切点,但不一定是切点,因为它提供了有关道路线形的预示信息。驾驶员注视这一点,然后转向,使目标点以恒定的速度从最初的偏移量移到车辆真实航向的正前方。一些持有该观点的研究者进一步研究了目标点与汽车操纵稳定性的关系,得出的结论是,司机的目光集中在车辆偏航率最高的部分。此外,许多研究者认为切点的方向主要是未来路径参考点和切点的相邻性的结果。
第三类模型基于这样的观点,即在稳态转弯时,切点以外的远区是一个重要的注视目标区域[20]。在该模型中,单个注视点转化为一个区域。该模型与未来的路径转向角一致,但难以与任何纯切点转向模型相协调。
这三种驾驶员的眼动模型在一定程度上揭示了驾驶员在弯道行驶时的视觉特征。他们都认为某些地理点或区域是驾驶员的注视目标,但对于实际注视目标是切点本身还是切点附近的一些其他道路点,以及目标点定位或目标点定向的功能意义,都没有达成共识。
因此,本文继续对驾驶员的眼球运动、注视策略和注视点的分布进行了研究。要求能干的参与者在指定的曲折路线上驾驶实验车,以便收集眼球运动和车辆驾驶参数。对所得数据进行了分析,发现了一些有趣的现象。司机在左转弯和右转弯时,都把目光集中在左边路缘。注视方向围绕参考轴波动,注视点分布在以水平注视点为中心的区域,而不是任何几何点。结合中国的交通规则和这些结果,我们在这里建议,没有驾驶员集中注意力的特定点。可以表明弯曲曲率的任何点或位置都可以是所谓的目标点。司机只是想操纵他们的车辆,以一种舒适和省力的方式安全地通过弯道。
2.方法和材料
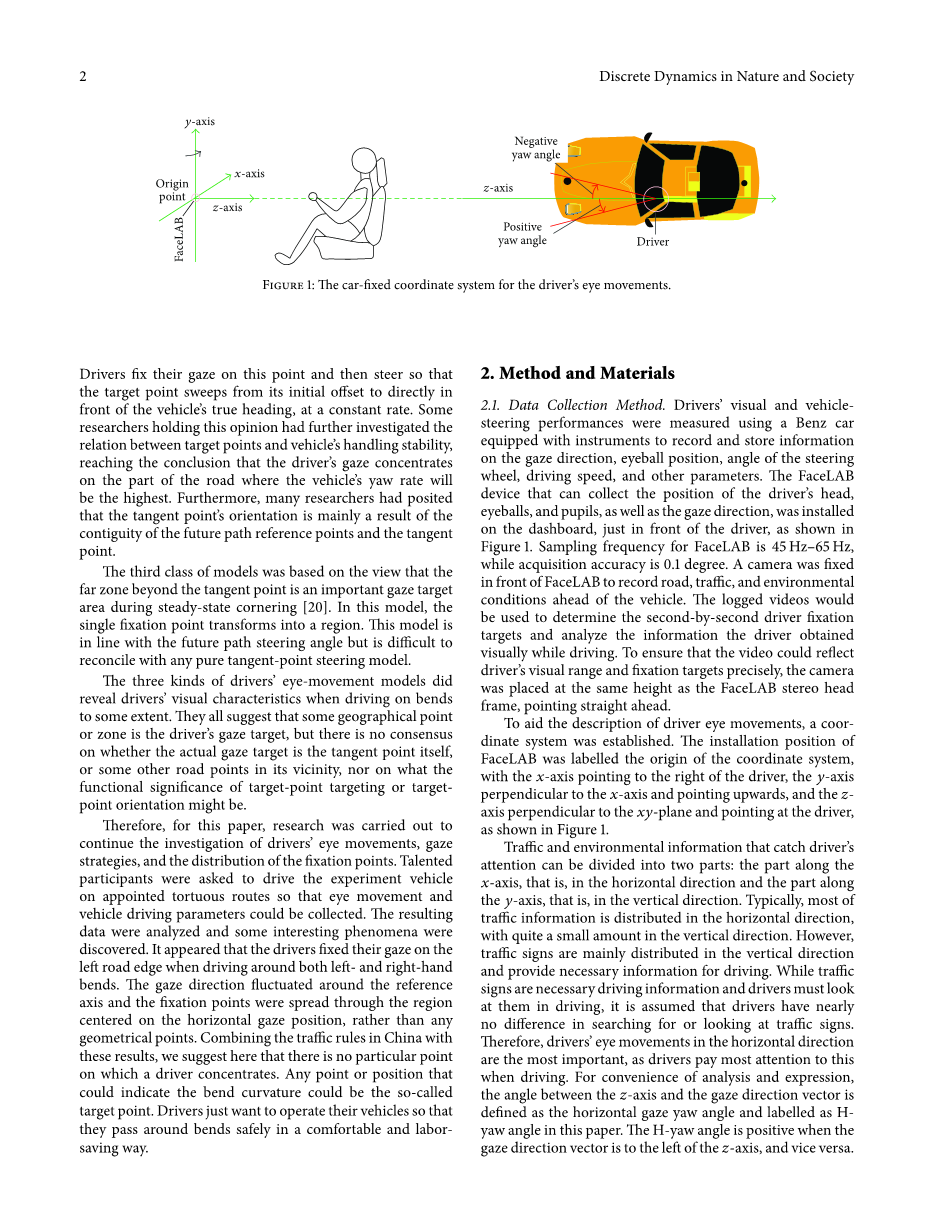
2.1。 数据收集方法。 使用配备仪器的奔驰汽车对驾驶员的视觉和车辆转向性能进行测量,记录和存储关于视线方向、眼球位置、方向盘角度、驾驶速度等参数的信息。将可以收集驾驶员头部、眼球和瞳孔位置以及注视方向的Facelab设备安装在仪表板上,驾驶员前面,如图1所示。 Facelab的采样频率为45Hz-65Hz, 采集精度为0.1°。在Facelab前面安装了一个摄像头,用于记录车辆前方的道路、交通和环境状况。所记录的视频将用于确定驾驶员逐秒注视的目标,并分析驾驶员在驾驶时视觉上获得的信息。为了确保视频能够准确地反映驾驶员的视野范围和注视目标,摄像机被放置在与Facelab立体头部框架相同的高度,并直指前方。
为了帮助描述驾驶员的眼球运动,建立了一个坐标系统。 Facelab的安装位置标记为坐标系的原点,x轴指向司机的右侧,y轴垂直于x轴并指向上方,z轴垂直于xy平面并指向司机,如图1所示。
引起驾驶员注意的交通和环境信息可以分为两部分:沿y轴的部分,即水平方向的部分,和沿x轴的部分,即垂直方向的部分。一般情况下,大部分交通信息都是沿水平方向分布的,相当少量的交通信息分布在垂直方向上。然而,交通标志主要分布在垂直方向,为行车提供必要的信息。虽然交通标志是必要的驾驶信息,司机在驾驶时必须注意这些信息,但人们认为,驾驶员在寻找或查看交通标志方面几乎没有任何区别。因此,驾驶员在水平方向上的眼动是最重要的,因为驾驶员在驾驶时最注意这一点。为了便于分析和表达,本文将z轴与注视方向矢量之间的夹角定义为水平注视偏航角,并将其标记为H-偏航角。当注视方向矢量位于z轴的左侧时,H-偏航角为正,反之亦然。
采用VBOX设备采集车辆行驶速度、转向角、制动力、横向加速度、横摆角速度、侧倾角等行驶参数。 VBOX采样频率为20Hz,车辆位置采集精度为1.8m。
2.2。 主题和路线。 十名受试者参加了做实验,均为男性,年龄27~55岁,他们都持有有效的驾驶执照,并有足够的驾驶经验(已驾驶至少8年), 包括实验的条件是正常的、未矫正的视力(有资格在没有指导的情况下驾驶汽车,并且不依赖于眼镜)和每天驾驶同一辆车。所有参与者都必须接受有关驾驶员视觉特性的相关理论(切点定向模型、未来路径模型、弯曲曲率和偏航角依赖模型等)。
选择了两条弯弯曲曲的道路作为试验路线。每条道路都是交通密度正常的高标准城市道路。在这两条道路上,不同路段的行车线数目不同。第一条路线全长21公里,第二条路线全长14公里。第一条路线包括位于天桥上的两个左转弯道(单向交通);转弯部分如图2所示。 第二条路线包括一个典型的立体交叉路口,有四个 右转弯(单向交通),如图3所示。 本文将左曲线段和右曲线段分别标为L1、L2和R1-R4。
所有驾驶均在日间进行,避免了交通高峰期。每名试验者在两条路径上进行两次预实验,以避免仪器故障、路径混乱和紧张情绪。在实际驾驶试验中,禁止获取车辆行驶路线方向和操作指导意见。在两条路线上为每位参与者进行了三次正式试验,以确保驾驶员的视觉参数和高质量的车辆驾驶参数被收集和储存。
由于VBOX依靠卫星信号对车辆行驶参数进行登记,当卫星信号被切断时,比如桥下的汽车行驶,数据采集的质量就会下降。因为我们的研究只限于弯曲的路段,没有一个是从桥下经过,所以这一现象并不影响我们的实验。
从实验中,获得了30组高质量的数据,用于每条路线的数据分析和对该现象的调查。由于数据量大、出乎意料的路段情况,曲线通过过程中的数据段与总体数据分离。为了捕捉曲线行驶的整个现象,曲线的入口、转弯和出口部分都包括在内。
Facelab和Vbox仪器使用不同的计时模式(Facelab使用计算机计时,Vbox使用UTC计时),采样频率也不同(Facelab使用45Hz-65Hz,Vbox使用20Hz)。 因此,需要时间同步,以确保眼睛参数和车辆参数具有相同的时间尺度。受Vbox采样频率的限制,两种参数被同步到0.05s。
3.驾驶员的眼动分析
3.1驾驶员步态轨迹与转向角的相关性。原始的注视记录显示了一个典型的扫视、注视和平滑跟踪的模式。注视和平滑跟踪对于显示驾驶员的注视目标和感兴趣的区域更为突出。 扫视发生在两个注视点之间,表明驾驶员的视觉搜索轨迹。受Facelab测量范围的限制,测量信号会发生失。因此,对原始注视记录进行微波过滤,消除噪声干扰,得到纯净的注视信号。
根据滤波后的注视记录和两类参数的时间同步,对一个典型实验中获得的相对于运动纵轴的车辆转向角(真实路向)和驾驶员对视觉目标的凝视方向进行了比较,并给出了它们的时变曲线,如图4和图5所示。这10名参与者都表现出相似的行为。由于转向角的幅度比H-偏航角的幅度大得多,为使比较清楚,转向角缩小了,缩小的比例在图5的相应部分中有说明。
从转向角和H偏航角的比较中得出了一个有趣的发现。与切点定向理论得出的结论不同,注视方向和车辆转向角的同时记录具有相当相似的变化趋势,方向盘以与注视方向相对于车辆前进方向的角度转动,经过约0.75秒的延迟后,注视方向和转向角之间的关系在本文中不再如此明显。在转弯过程中,当车辆在曲线截面的不同截面上行驶时,转向角会发生变化,如图4和图5所示。然而,总体变化趋势视线的方向不清楚。
从图中可以看出,在绕曲线行驶的整个过程中,驾驶员的注视方向始终回到参考轴上。试验者的注意力转移呈现为一种平滑追踪的形式。司机们似乎是故意在找什么东西。此外,z轴两侧的绝对最大H-偏航角大致相等。左、右转弯时注视方向围绕参考轴的波动几乎是均匀分布的。由于注视方向是在汽车固定坐标中定义和测量的,几乎不变化的凝视方向表示驾驶员的注视方向与车辆的真实行驶方向一致,即运动纵轴,如图6所示。因此,驾驶员在进行弯道驾驶时感兴趣和关注的区域主要分布在水平注视位置周围的区域。水平注视位置是指驾驶员保持水平视线并直视前方的注视位置。很容易看出,水平注视位置与z轴平行,如图7所示。
为了确定H偏航角的分布,进行了初步的统计分析,以获得H-偏航角的正、负水平。表1列出了标为P-百分比的正H-偏航角的百分比。分析结果表明,在几度的范围内,驾驶员在弯道行驶时的注视目标主要集中在水平注视位置区域。目标的焦点保持在直线方向,即车辆运动的方向。根据SAE J 1050,为了清楚地观察目标并准确地判断它们的大小和位置,当H-偏角大于0.26弧度(15度)时,驾驶员将需要转头。因此,还测量了绝对值大于0.26弧度的H偏航角的数量和百分比,以便检测偏航角的概率分布和驾驶员必须移动头部的情况。表1也列出标记为L-百分比的大型注视向量的水平。计算结果表明,大偏航角占左弯和右弯所有H偏角的2%以下,说明驾驶员在转弯时很难转头,只关注前方的道路、交通和环境状况。
转动方向盘会使车辆的位置发生变化,并决定真正的驶向。相对于真实驶向的注视方向,使用汽车固定坐标定义和测量,可以执行坐标转换,将注视方向从汽车固定坐标系转换为地球固定坐标,给出图8所示的结果。很明显注视方向和转向角的变化趋势和变化频率是一致的。因此,注视方向零点附近的波动曲线会产生注视方向与车辆真实驶向的一致性,即视线方向与转向角的一致性。
3.2。 注视点和兴趣区的分布。试验者的注视行为和视觉特征在空间和时间上都与任务条件密切相关。研究对象寻找与任务相关的注视目标,以告知其车辆的操作情况,并安全、恰当地驾驶。此外,在不同阶段,注视目标的选择与复杂驾驶任务的执行密切相关。必须及时选择正确的注视目标进行验证和操作,以满足汽车的驾驶的要求。因此,需要根据真实生活和详细的视频来验证参与者在哪里查看以及他们关注和搜索的内容。
在第3.1节中,对驾驶员在曲线上驾驶时注视方向的变化趋势和分布进行了调查和分析。结果表明,几乎所有驾驶人的H-偏角都小于0.26弧度,驾驶员所关注的感兴趣区域(AOIs)主要集中在水平注视位置上。然而,这一发现的原因不能仅仅依靠时变曲线来确定.在特定的驾驶任务中,每秒钟的凝视目标都需要确定。
为了研究驾驶员在曲线行驶中的注视点目标和AOIs的分布情况,从原始的眼动参数中提取注视点。它们被绘制在相应的前景图像上,说明车辆前方的实时道路、交通和环境条件。选择了一条有代表性的左转弯曲线,驾驶期间每注青色十字表示切点。
很明显,与切点定位理论的观点类似,大多数注视点都分布在内部的道路边缘,驾驶员的注意力集中在道路线形上。然而,在转弯过程中,驾驶员的水平注视位置非常接近切点,如图9所示。 因此,试验者是盯着切点看还是向前看是无法判断的。更仔细的观察显示,与切点和未来路径模型不同,测试者的AOI低于切点,并分布在与切点相邻的附近区域(近区),如图10所示。虽然大部分注视点位于切点下方的近区中,但是预览距离比预览理论[21,22]中确定的距离短。预览距离是从车辆到注视目标的距离。由于在左转弯行驶时转向角度较小(约35度),我们需要更多的证据来确定准确的注视目标。
右手弯上注视点的分布如图11所示。 白色和青色十字分别代表驾驶员的水平注视位置和切点。 幸运的是,在右转弯曲线中,水平注视位置和切点之间的距离足够大,可以相互区分。此外,与左转发现不同的是,在这种情况下,参与者的注视点位于路缘的外部。如图12所示,大部分注视点分布在最左侧象限(远区)可见的路面部分。当绕右侧曲线行驶时,AOI高于切点,这表明预览距离大于预览理论[21,22]中确定的距离。
通过以上对左、右转弯曲线的调查和分析,得出了在曲线行驶中驾驶员应注意左侧的结论。在中国,司机靠右行驶,左边是用来超车的。因此,左边的交通情况更为复杂和重要。为了安全驾驶和适当地操纵车
资料编号:[4115]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

