基于模型的电动汽车功能安全故障诊断
Jiyu Zhang , Giorgio Rizzoni
俄亥俄州哥伦布市俄亥俄州立大学
机械与航空航天工程工业部汽车研究中心43220美国(电子邮件:zhang.1919@osu.edu)
俄亥俄州哥伦布市俄亥俄州立大学
机械与航空航天工程工业部汽车研究中心43220美国(电子邮件:(e-mail: rizzoni.1@osu.edu)
摘要:电动汽车和混合动力汽车(EV/HEV)的功能安全性至关重要。提高电动汽车/混合动力汽车功能安全性的一种方法就是开发可靠、鲁棒性高的故障诊断和容错控制系统,一旦部件发生故障检测到,以便采取有效的补救措施以避免系统故障。鲁棒故障诊断是容错控制策略的必要前提。在本文中,我们使用一个V形图结合容错控制的发展,提出一个进行汽车故障诊断的系统过程。我们还介绍了一种基于结构的诊断方法。构成容错控制基础的分析。结构分析方法使得利用系统的结构模型来评估系统的分析冗余度成为可能。系统的矩阵形式的数学模型,从中可以导出一组用于故障检测和隔离的分析冗余关系。结构分析是有用的在诊断设计的早期阶段,因为不需要特定的数字形式的系统参数知识。本文通过对装有永磁同步电机(PMSM)驱动系统的电动汽车进行诊断策略设计,论证了该方法的应用及其广泛的实用性。电动汽车案例研究的重点是传感器故障,但该方法适用于任何部件故障。
copy;2015年,版权由爱思唯尔有限公司主办的IFAC(国际自动控制联合会)所有。
关键词:功能安全;HEV/EVS;故障诊断;容错控制;结构分析法
由于复杂性的增加和电气和电子元件的使用,功能安全在电动和混合动力汽车等未来汽车发展中越来越重要。为了确保功能安全,汽车工业制定了自己的功能安全标准(ISO26262),定义了功能安全要求与汽车安全相关部件在不同阶段的生命周期性能,参考Christiaens等人(2012)。
开发符合功能安全标准的车载诊断(OBD)设计过程是保证HEV/EVS功能安全的有效途径之一。参考Cordoba Arenas等人(2013)研究电气化动力总成关键部件的潜在故障和故障模式及其后果。这些电气或电子部件中的任何故障,例如短路或其中一个电机绕组断路,可以导致车辆性能下降,噪音和振动增加,扭矩请求意外增加,以及其他可能影响车辆的故障功能安全等严重问题。因此,发展可靠稳定的诊断和容错能力电气化动力控制系统,以保证安全和运行可靠是非常重要的。
电力驱动系统是任何电动汽车的关键子系统,其故障诊断策略的研究已经进行了大量的工作。例如,我们列举了与电源逆变器故障(Meinguet等人,2013年;Mendes和Cardoso,1999年;Peuget等人,1997年)相关的工作、电机故障(Nandi等人,2005年;Cruz和Cardoso,2001年;Bellini等人,2008年;Khan和Azizur-Rahman,2009年)以及传感器故障(Gruz等人,1997年)相关的工作。2013年;Najafabadi等人,2011年)。更具体的焦点汽车电气传动系统的故障诊断应用,例如,参考Lee等人(2013)研究电动汽车用永磁同步电机退磁故障诊断。参考Jeong等人(2005)讨论故障检测用于电动汽车中的各种传感器故障。然而,这些参考资料仍然是关于电气系统内部驱动系统的特定故障,没有开发用于汽车故障诊断和容错的系统方法控制。在本文中,我们提出了一种方法,即不特定于任何特定类型的故障或特定子系统,一般适用于任何汽车系统,符合ISO 26262的功能安全标准。特别是,我们重点介绍了该方法在电动汽车/混合动力汽车应用中的电驱动系统故障诊断中的应用,并通过考虑用传感器故障检测来举例说明该方法。
将应用程序的要求和规范与算法和软件的实现联系起来的V形图的使用是汽车工业中常用的控制系统开发方法。在本文中,我们提出了一种类似的方法,定义了用于开发电驱动诊断和容错控制系统的V图要素。图1所示的V图从诊断要求开始,并通过基于模型的设计方法来实现。算法采用软件在环(SIL),硬件在环(HIL)和最终在车的方法。该方法的核心要素包括:1)需求的定义;2)详细的设备和故障模型的开发,使我们能够了解不同类型故障的结果;3)制定诊断系统的策略;以及4)实施该诊断策略的各个步骤。在早期的论文中,Cordoba Arenas(2013年),张(2013年)等人已经进行了故障分析、设备和故障模型建模。本文特别关注一种诊断算法设计方法,即结构故障检测和隔离法。
故障检测与隔离的结构分析(FDI)是一种方法,它使用系统的结构模型来识别模型中系统的分析冗余关系(ARR),以便我们诊断系统中的故障.Blanke和Schroder(2003年);Krysander(2006年)。这种结构方法的重要性在于,它不具体取决于具体的数值参数,而是取决于模型的结构,如本文后面所示。因此,在系统设计和控制的早期阶段,它是一个非常合适的工具,因为在控制系统开发过程仍在进行的同时,可以识别诊断需求。结构分析方法的另一个优点是,它将复杂的系统分解成更小的子系统,这种分解允许设计更高效和更容易实现的诊断算法。在结构分析步骤之后,仍然需要开发特定的诊断算法来实现,这是一个很好理解的主题,Isermann(2005年);Rizzoni等人(2009年)。具体诊断算法的选择,例如是否基于线性/非线性观察者、奇偶方程或其他诊断方法,取决于应用的具体情况和问题的性质。
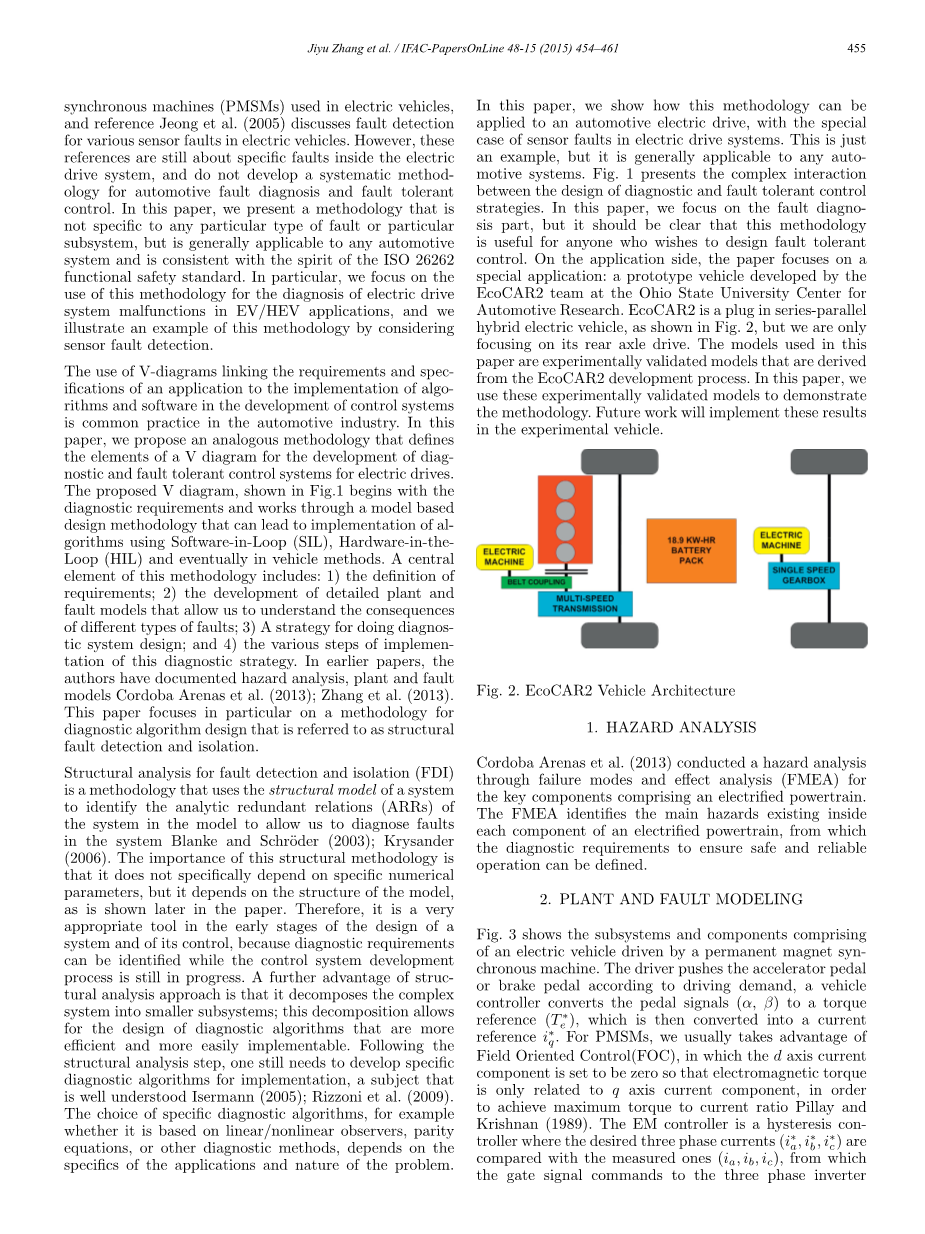
本文以汽车电气传动系统传感器故障为例,说明了该方法在汽车电气传动系统中的应用。这只是一个例子,但它通常适用于任何汽车系统。图1显示了诊断和容错控制策略设计之间的复杂交互。在本文中,我们将重点放在故障诊断部分,但应该清楚的是,这种方法对于任何希望设计容错控制的人都是有用的。在应用方面,本文重点研究了一个特殊的应用:由俄亥俄州立大学汽车研究中心的EcoCAR2团队开发的原型车。EcoCAR2是一款插电式混联混合动力电动汽车,如图2所示,但我们只关注其后轴驱动。本文中使用的模型是从Ecocar2开发过程中推导出来的经实验验证的模型。在本文中,我们使用这些经过实验验证的模型来演示这种方法。未来的工作将在实验车上实现这些结果。
图1.汽车故障诊断与容错控制的系统方法
图2. EcoCAR2汽车结构
1.故障分析
Cordoba Arenas等人(2013)通过故障模式和影响分析(FMEA)对包含电气化动力总成的关键部件进行了危险分析。FMEA识别了电气化动力总成各部件内存在的主要危险,从中可以确定确保安全可靠运行的诊断要求。
2.设备和故障模型
图3显示了由永磁同步电机驱动的电动车辆组成的子系统和部件。驾驶员根据驾驶需求推动加速踏板或制动踏板,车辆控制器将踏板信号(alpha;,beta;)转换为扭矩基准(Te),然后转换为电流基准iq。对于永磁同步电机,我们通常利用磁场定向控制(FOC),其中D轴电流分量设置为零,因此电磁转矩仅与Q轴电流分量相关,以实现最大转矩电流比,Pillay和Krishnan(1989)。电磁控制器是一个滞环控制器,其中所需的三相电流(IA、IB、IC)与测量的电流(IA、IB、IC)进行比较,由此生成对三相逆变器的门信号命令。逆变器将蓄电池的直流电压转换为三相交流电压,这是驱动三相永磁同步电动机所必需的。在适当的控制下,永磁同步电机将产生所需的扭矩。齿轮箱用于放大电磁转矩,以提供足够的转矩来驱动车辆。
图3. 永磁同步电机驱动系统
为了深入研究部件故障对整个系统的影响,我们开发了一个复杂的车辆模拟器,其中包括一个详细的永磁同步电机驱动模型,该模型包含故障模型,并允许模拟故障效应。参考Zhang等人(2013)讨论了电力驱动系统的故障建模技术。出于控制目的,电力驱动系统通常嵌入各种类型的传感器,包括电流传感器、电压传感器、速度/位置传感器等。电流传感器对扭矩控制很重要,而交流电压传感器则对电力驱动的输入进行在线监测,以确保电压平衡。大多数的电流传感器HEV/EV中使用的电流和电压传感器是霍尔效应传感器,通常会出现零点漂移或传感器失准故障。位置/速度传感器在交流电机驱动控制中也非常重要,因为它们为坐标变换提供车轮角度信息。对于位置传感器/分解器,有两种主要的故障类型:量级不平衡和不完全正交,Hwang(2011年);Brownet(2008)等。张等(2013)研究了电驱动中电流和速度传感器故障对车辆整体性能的影响,结果表明,电流传感器或位置传感器中的偏差会导致传递扭矩和效率显著降低。因此,本文提出了一种电传动系统中电流传感器、电压传感器和位置/速度传感器故障的检测与隔离策略。
3.故障检测与隔离的结构分析法
3.1永磁同步电机数学模型和结构模型
永磁同步电机驱动系统的数学模型: 为了控制的目的,永磁同步电机通常在同步参考框架中建模,其中三相变量需要转换成用D和Q坐标表示的同步参考系。附录A给出了电动汽车用永磁同步电机驱动的数学模型,其中,ia、ib、ic是三相电流,va、vb、vc是三相电压,iq、id代表q和d轴电流。Vq、Vd为q、d轴电压,Lq、Ld为q、d轴电感,lambda;m为转子磁铁产生的磁通量,omega;m为电机转速,theta;r为转角位置,P为极对数,te为电机传递的电磁转矩,j为r的转动元件的转动惯量,b为摩擦系数,tl为道路荷载,omega;wh为车轮速度。
永磁同步电机驱动系统的结构模型:结构模型由关联矩阵表示,其中每行矩阵连接一个具有特定未知、已知变量和故障的方程。已知变量集定义为传感器输出和已知控制输入,故障集是我们在系统中考虑的故障。其余的变量,包括动力学状态和所有代数变量都被定义为未知变量。因此,根据附录A中的方程,已知变量为E13~E20给出的测量变量,故障集为所有传感器故障,未知变量为待确定模型方程中的剩余变量。未知、已知变量和故障的集合由以下公式给出:
未知变量集:Va,Vb,Vc,Vq,Vd,theta;r,ia,ib,ic,iq,id,omega;m,Te,Tl,Vveh,omega;wh
已知变量集:yva、yvb、yvc、yia、yib、yic、yomega;m、ytheta;r、yomega;wh
故障集:fva,fvb,fvc,fia,fib,fic,fomega;m,ftheta;r,fomega;wh
因此,可以很容易地得到永磁同步电机的结构模型,如图4所示。
图4.永磁同步电机驱动系统结构模型
3.2模型冗余
根据Dulmage 和Mendelsohn (1958年) 冗余模型用数学工具DM分解得出。分解,它重新排列稀疏矩阵的行和列,使其看起来像是上三角形形式,将系统模型结构化为三个部分(如图5所示):
bull;结构上,在确定的M部分下,方程式比未知方程式少;
bull;结构上刚确定了第M0部分,其中方程式的数量与未知方程式的数量相同;
bull;结构上超过确定的M 部分,其中方程多于未知,这也是模型最大冗余度所在的部分。
永磁同步电机驱动系统的DM分解结果如图6所示,其中最大冗余度表示在阴影区域。
图5.模型的DM分解
图6。永磁同步电机结构模型的DM分解
Krysander和Frisk(2008)指出,如果故障位于结构上的过度确定部分M ,则可以检测到故障。对于PMSM驱动系统,所考虑的传感器故障影响方程式e13至e20,方程式e13至e20位于结构模型的结构确定部分(如图6阴影区域所示),表明可以检测到所有这些故障。
3.3可隔离性分析
根据Krysander和Frisk(2008)给出的定义:如果fi位于模型的结构超定部分,则故障fi在结构上与fj隔离,但fj所在的方程除外,即
(1)
根据定义1,可以对模型中考虑的传感器故障进行可隔离性分析。已经发现所有的故障都是相互隔离的。
3.4诊断测试选择
最小结构超定集:诊断测试可以通过使用最小结构超定(MSO)集来形成,其中有一个比未知方程多的方程,即具有一个冗余的方程。MSO集被设计为使用尽可能少的方程,同时仍然保持冗余以检测特定的故障。如图7所示,MSO集的使用将复杂系统分解为更小、更简单的子模型,从中设计残差和应用特定的诊断算法更为有效。对于每一个MSO,可以通过从其方程中依次删除未知变量(被选择生成一个余数的变量除外)来找到用于形成余数的一致性关系。这种方法发现的残差称为连续残差发生器(Krysander和Nyberg(2002年);Krysander(2006年);Sundstrom(2011年))。Krysander等人(2008)讨论了寻找所有MSO集合的有效算法,这些集合为我们提供了诊断测试的所有可能选项,以便检测和隔离特定故障。是否选择使用MSO以及要使用多少MSO取决于诊断问题的要求和系统的具体情况。一个复杂的模型通常包含代数和动力学方程的组合,这使得它的MSO同时包含代数和动力学方程。因此,在选择最小结构超定集时,我们应考虑积分和导数因果关系。Frisk和Nyberg(2001年)、Svard和Nyberg(2010年)、Sundstrom等人(2014年)。
图7. 最小结构超定集诊断
永磁同步电机驱动选择试验诊断: 基于PMSM结构模型,可以构造多个MSO集来隔离所有传感器故障。我们希望建立我们的诊断测试,以便每个MSO使用特定的测量集,并且每个传感器故障影响不同的MSO集。例如,如果我们想确定三个电流传感器中的哪一个存在故障,我们可以构造三个MSO,这样每个MSO只使用三个电流传感器中的一个,并且可以直接使用

英语原文共 8 页
资料编号:[4085]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

