英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
Hindawi
工程数学问题
2017年卷,文章ID 1615691, 14页https://doi.org/10.1155/2017/1615691
研究文章
基于驾驶员-车辆特征演化的城市路网车辆群状况逆向重建方法研究
肖元旺,1,2建强旺,2刘振学,1刘亚琪,1王景庚3
1山东工业大学交通与汽车工程学院,淄博255049;2清华大学汽车安全与能源国家重点实验室,北京100084
3山东省淄博实验中学,山东淄博255000
通讯地址:王晓远;2016年12月28日2017年1月26日录用;2017年2月20日
学术编辑:Nicolas 胡东
版权copy;2017王晓远等 所有这些是一个开放存取物品下分布式创新共有属性许可证,允许无限制的使用,分布和繁殖在任何媒介,提供最初的工作是正确引用。
车辆群情况是由目标车辆和相邻交通实体构成的动态排列的状态和情况。它是交通流理论研究中经常涉及的概念,特别是主动车辆安全问题。深入研究车辆群状况对交通安全具有重要意义。以三车道条件为例;本文综合考虑了目标车辆及其邻近车辆的特点,对车辆群进行了重构。利用伽玛分布理论识别研究区目标车辆到达终点时的车辆群情况。从驾驶员-车辆特征演化的角度出发,提出了城市路网中车辆群情况的逆向重建方法。实际驾驶、虚拟驾驶和仿真实验结果表明,本文建立的模型是合理可行的。
1. 介绍
由动态交通实体组成的车组情景是交通情景[1]的核心内容。准确研究车辆群情况的约简方法,对于研究交通流理论和主动车辆安全具有重要意义。以往的研究多考虑交通状况的评估和预测。Kä带等。[2]研究了识别涉及两辆车在十字路口的情况。基于运动数据库,在2 - 4秒的时间内估计出两辆车的运动轨迹,并利用预测的轨迹识别和预测交通状况。利用实际驾驶实验获得的GPS数据对模型进行验证,结果表明,该方法能够在车辆到达交叉口中心前1.5-3秒内正确识别情况。Meyer-Delius等人提出了一种概率方法来模拟和识别交通状况。交通状况被定义为一系列的状态
并利用隐马尔可夫模型得到典型交通场景的交通态势概率分布和演化规律。驾驶员在复杂多变的驾驶场景下的行为特征没有得到充分的考虑,以往对车辆群体情况的系统研究也存在不足。Zhang等人根据目标车辆及其邻近车辆的空间分布,对双车道情况下的车组情况进行划分和简化。简化的车辆分组情况包括8个状态。在此基础上,Wang等人做了进一步的研究;研究了三车道情况下车辆群情况的划分和简化方法。但是,在对上述车辆群体情况进行划分和简化的过程中,只考虑了车辆的位置分布,忽略了以下车辆、车辆类型、驾驶员特征,如驾驶倾向的影响。Wang等考虑感兴趣区域内车辆类型、速度、位置等特征,建立车辆群的数学表达式
2
的情况。但是,没有考虑驾驶员特征对车辆群体状况的影响。
GPS的出现和发展为许多领域的数据采集提供了一种新的方法。与此同时,随着GPS的普及,隐私披露问题也日益突出。由于位置和轨迹的隐私泄露,多次发生被骗、财产损失甚至人员伤亡的案件。因此,隐私保护已成为全社会关注的焦点。交通工程领域的许多学者一直非常重视隐私保护的研究。Sun和ban[5]提出了一种基于移动交通传感器样本车辆短期轨迹重建信号交叉口车辆轨迹的方法。以往的研究侧重于城市规模交通的知识提取;忽略了细粒度城市交通的知识提取。在此基础上,Ban和Gruteser[6]对细粒度城市交通的知识提取进行了总结和分析。结合交通建模技术和基于代码签名的隐私保护算法提取细粒度城市交通知识,对交通信号控制系统的性能进行评价。研究人员指出,城市道路交叉口的隐私保护已经进行了研究,主干道(包括部分交叉口)和干线网络的隐私保护模型将是未来研究的重点。开发适合不同城市的隐私保护技术。
目前,交通工程领域很少考虑将隐私保护与交通应用相结合。由于GPS的低普及率和隐私保护意识的增强,研究者很难收集到所有车辆的驾驶信息。此外,即使能够获得所有车辆的行驶信息,也很难处理大量的数据。因此,研究信息较少的相关问题具有重要意义;它有利于隐私保护和解决交通问题。基于此,本文以三车道场景为例,深入研究了在驾驶员隐私保护的前提下,车辆群情况的约简方法。利用兴趣敏感区域内车辆的类型、相对距离、相对速度(包括目标车辆)和驾驶员对目标车辆的倾向性划分车辆群体情况。基于驾驶员-车辆特征的演化,建立了利用目标车辆轨迹数据反演城市路网中车辆群情况的方法。最后,通过实际驾驶、虚拟驾驶和仿真实验对该方法进行了验证。验证结果表明,该方法在渗透率为20%时,准确率达到79%。在保护驾驶员隐私的前提下,研究基于驾驶员-车辆特征演化的车辆群情况逆向重构方法,不仅可以提高智能指挥系统的性能,而且具有一定的推广意义
工程数学问题
(一)
(b)
(c)
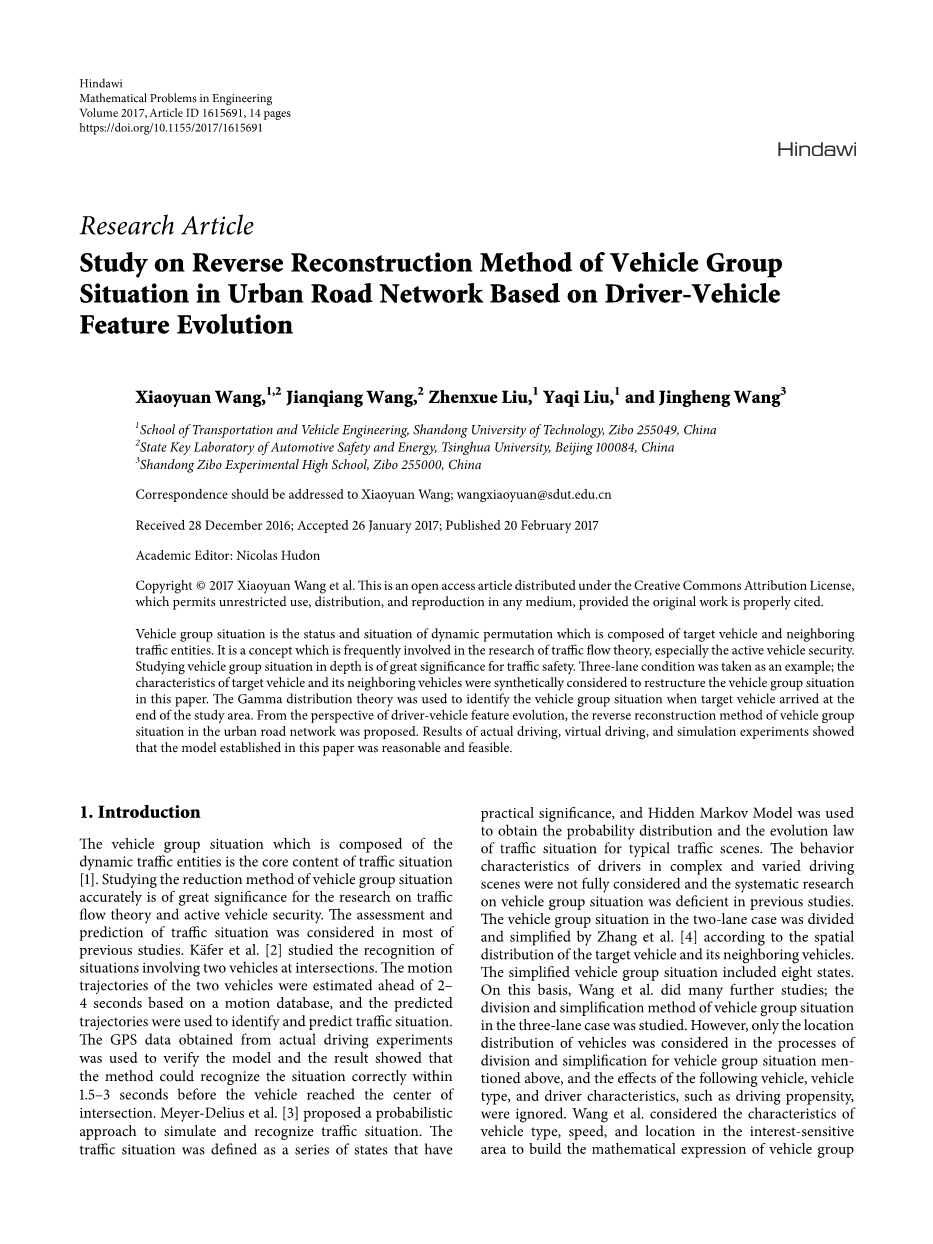
图1:感兴趣区域划分。
为基础交通流模型的研究和改进奠定了基础。
2. 相关工作
2.1。整车组情况划分。在三车道场景中,以目标车辆的前保险杠为分界线,目标车辆在中车道、左车道、右车道时的三种感兴趣区域如图1(a)、1(b)、1(c)所示。
利用兴趣敏感区域内车辆的类型、相对距离、相对速度(包括目标车辆)和驾驶员对目标车辆的倾向性划分车辆群体情况。物理中的“力”概念是用来描述每个分区内的车辆对目标车辆的影响。利用“力”集(分为斥力和引力)抽象地表示目标车辆所在的车群情况。力的计算方法参考文献[7]。划分的车辆组情况如图2所示,其中,分别表示三车道场景下的16种车组情况。符号“ ”代表吸引力,“minus;”代表了排斥。
2.2。基于伽玛分布的车辆群情况识别方法。车辆到达道路横截面的车头时距可以用Gamma分布来描述[8-10]。假设到达道路尽头的车辆车头时距服从Gamma
工程数学问题 3.
Z9 Z10 Z11 Z12
( )(minus;)( )(minus;)
(minus;minus;)( )( )
( )(minus;)( )(minus;)
图2:三车道场景中车辆分组情况划分。
实验车
非实验车
图3:目标车辆及其邻近车辆的位置分布。
本文中的分布。伽马分布的概率密度函数为:
式(1)中,k为形状参数,theta;为尺度参数,xsim;Gamma;(k,theta;)。相应的参数k和theta;根据历史数据可以得到。得到车头时距最优模式[10]:
模式= (kminus;1) theta;。(2)
目标车辆及其邻近车辆的位置分布如图3所示。
研究区域结束时目标车辆群情况识别步骤如下:
(1)获取目标车辆位于VTL2时目标车辆及其邻近车辆在不同子区域的VTL1、VTL2到达时间。目标车辆到达VTL1和VTL2的时间n1、左前方车辆n2左后方车辆n3、前车n4、后方车辆n5右前车n6、右后方车辆n7标记为t1,t2,t3,t4,t5,t6,t7和,,,根据时间信息,应分别做以下工作:
(a)计算实验车辆的行驶时间= minus;,i= 1,2,hellip;, 7,然后
4 工程数学问题
图4:三车道场景示意图。
基于贝叶斯决策树动态识别模型[11]识别目标车辆的类型和驾驶员倾向。
(b)计算到达时间的差异在VTL2目标车辆和其他实验车辆:Delta;= | |。计算实验车辆在VTL2到达时间的差异n2 n3:Delta;= | | 。计算实验车辆在VTL2到达时间的差异n6和n7,Delta; = | -| 。
(c)推导出非实验车辆的数量对利率敏感的地区根据Delta;?23, Delta;?41, Delta;?51, Delta;?67以及车头时距的最佳模式。
(d)计算每辆实验车辆的平均速度V?, V? =?/?? (?=1,2,...,7),、在哪里L表示VTL1与VTL2之间的距离。V2, V3,hellip;, V7用来近似表示左前车、左后车、前车、后车、右前车、右后车的速度。根据目标车辆的平均速度,可以估计目标车辆与其相邻车辆的相对速度。
(2)以离目标车辆最近的实验车辆为标准;假设道路上各种类型的车辆在各车道上服从均匀分布,根据不同类型车辆在道路上的比例估计相邻车辆的类型。
(3)考虑目标车辆到达VTL2时邻近车辆的类型、位置、速度以及驾驶员对目标车辆的倾向性;可以得到各车道对目标车辆的作用力为
识别道路尽头车辆群情况。
3.方法
Hidden Markov Model (HMM)[12]是一个由马尔可夫链和一般随机过程组成的时间序列统计分析模型。利用马尔可夫链描述了驾驶员-车辆特征的演化过程,利用一般随机过程描述了车辆群情况下观测输出值的统计特征。
本文以三车道场景为例,阐述了车辆群情况的重构方法(如图4所示),由于交通信号的控制,交叉口的车辆行驶特性与道路上的不同。车辆在不同区域行驶时,车辆群情况的过渡规律必然不同。因此,在大量的观测数据的基础上,将城市路网划分为不同的区域,并划分出不同的区域。分别研究了不同区域车群情况的转变规律,最终揭示了整个路网的转变规律。
在图4中,在不受交通信号影响的情况下,在交叉口上游的普通路段设置了分割线1。加宽段入口设分割线2,交叉口上游加宽段出口设分割线3。分割线4设置在停线位置。在交叉口下游加宽段出口设置5、8、11号线。在交叉口下游的普通路段设置6、9、12号线。在十字路口下游的人行横道后面设置了7号线和10号线。虚拟行程线设置在分割线5、6、8、9、11和12处
工程数学问题
分别用VTL1、VTL2、VTL3、VTL4、VTL5、VTL6表示,[13]。
3.1。路段车辆群情况的重建方法。以图3中VTL1(分割线5)与VTL2(分割线6)之间的路段为例,说明车组情况重构的步骤:
(1)根据VTL1和VTL2到达时间,估计实验车辆在5线和6线之间的行驶时间。然后利用目标车辆位于分割线6时的伽玛分布识别车辆群情况。
(2)假设车辆群情况与驾驶员-车辆特征的过渡具有马尔科夫性质,且车辆群情况在时间上具有马尔科夫性质??受到相应的驾驶员-车辆特征的影响。由于驾驶时没有改变车型,只是改变了驾驶倾向;因此,驾驶员-车辆特征的转变在这里代表了驾驶倾向的演变。驾驶员-车辆特征在不同时间对车辆群体情况的影响如图5所示。
本文利用隐马尔可夫模型揭示了适应驾驶员-车辆特征时变特征的车辆群情况转变机理。嗯哼的代表是? = (?,?,?,?,?)。参数描述如下:
(1)以小型车及其驾驶员的倾向性为例。由于车型不随时间变化,驾驶员-车辆特征集(小型车)标记为?={ }。马尔可夫链在时间上的状态是t标记为
(2)车辆群情况集合记为Z= {}。车辆群在时间上的状态t标记为
(3)初始驾驶员-车辆特征状态概率分布矩阵标记为?={? 1,? 2,? 3}。当状态的概率t= 1时表示为=P(), i= 1,2,3。
(4)驾驶员-车辆特征的转移概率矩阵标记为as?=(? ??)3times;3 ,??? =?(?? 1 =? ? |? ? =? ?),?,? = 1,2,3. ??? 表示驾驶员-车辆特征由状态改变的概率从Fi转换为Fj在时间t 1。
(5)给定驾驶员-车辆特征下车辆群体情况概率分布矩阵为
5
图5:不同时刻驾驶员-车辆特征对车辆群体情况的影响。
标记为?=(? ?(??))3 times; 16 ,??(??)=?(?? =? ? |? ? =? ?),1le;?le;3 ,1le;?le;16 .??(??)。表示车辆群情况发生的概率?? =? ? 当驾驶员-车辆特征是Fj在时间k,的值?={? 1,? 2,...,?16}. 。
采用Baum-Welch估计算法对??的参数进行选择和优化。?=(?,?,?,?,?)[14,15].
首先,给出正向变量alpha;t(i)和逆向变量beta;t(i):
??(?)=?(? 1,? 2,...,? ?;? ?=? ?) 1le;?le;16。(3)正向变量??(?)表示概率
当驾驶员-车辆特征是Fi在时间t观察到的车辆群情况?? (? = 1,2,...,?)是?? (? = 1,2,...,?)在时间上k(k= 1,2,hellip;式中alpha;1(i)= (u1)表示车辆群情况序列时的概率x1 = u1、驾驶员-车辆特征是Fi在最初的时刻t= 1。
??(?)=?(?? 1,?? 2,...,??|? ?=? ?)
1le;ile;16,1le;tle;Lminus;1。
(4)
后向变量??(?)表示观察到的车组情况的概率X? (?=? 1,? 2,...,?)是?? (?=? 1,? 2,...,?)在时间上k(k=t 1,t 2,hellip;, L)驾驶车辆的特征是Fi当时间为t。设初值??(?)= 1,表示观察到的车组情况序列终止状态的概率?? =? ?当t= L当驾驶员-车辆特征是Fi那是一件大事。
根据驾驶员-车辆特征在不同时刻对车组情况的影响,可以得到alpha;i(i)和beta;i(i)的递推公式(如(5)所示):
?? 1(?)=?(?1,? 2,...,?? 1;? ? 1=? ?)=?(?? 1|? 1,? 2,...,? ?;? ? 1=? j)?(? 1,? 2,...,? ?;
全文共18804字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[640]
以上是毕业论文外文翻译,课题毕业论文、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

